







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
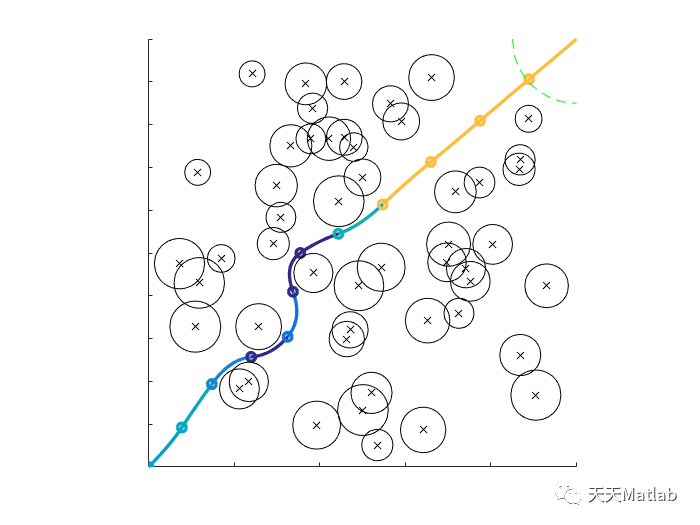
根据敌方防御雷达,防空火力等威胁以及禁飞区的分布情况,构造基于战场威胁中心图,得到可以规避各种威胁的航迹线段,结合战场威胁信息,计算航迹段的代价,形成有向图,计算出无人机初始最优航路,利用无人机初始状态和性能约束进行航路的进一步修正,满足了无人机的飞行特点.并运用MATLAB编制图形化界面,实现仿真结果的图形显示.
⛄ 部分代码
function [M] = make_movie(Path_bez)
global n_obsd obs_d_sp obs_d_v obs_d_s obs_d_cp Dynamic_Obstacles;
global n_obs; %number of obstacles
global obs; %positions of obstacles
global obs_rad; %radius of obstacles
global uav_ws;
global t;
M(length(Path_bez)) = struct('cdata',[],'colormap',[]);
hold on
%plot static obstacles
for j = 1 : n_obs
plot(obs(j,1),obs(j,2),'xb'); % static obstacles' centers
x = obs(j,1) - obs_rad(j) : 0.001 : obs(j,1)+ obs_rad(j);
y = (obs_rad(j)^2 - (x - obs(j,1)).^2).^0.5 + obs(j,2); %top part of circle
y1 = -(obs_rad(j)^2 - (x - obs(j,1)).^2).^0.5 + obs(j,2); %bottom part of circle
plot(x,y,'b');
plot(x,y1,'b');
end
for i = 1 : length(Path_bez)
%plot uav position and size
x = Path_bez(i,1) - uav_ws : 0.001 : Path_bez(i,1)+ uav_ws;
y = (uav_ws^2 - (x - Path_bez(i,1)).^2).^0.5 + Path_bez(i,2); %top part of circle
y1 = -(uav_ws^2 - (x - Path_bez(i,1)).^2).^0.5 + Path_bez(i,2); %bottom part of circle
plot(x,y,'Color',[0, 0.5, 0]);
plot(x,y1,'Color',[0, 0.5, 0]);
xlim([0,100]);
ylim([0,100]);
%plot dynamic obstacles
if Dynamic_Obstacles == 1
%plot small square at center of dynamic obstacles at each time step
for k = 1 : n_obsd
plot(obs_d_v(k,1)*t(2)*(i-1) + obs_d_sp(k,1),obs_d_v(k,2)*t(2)*(i-1) + obs_d_sp(k,2),'rs');
end
%plot dynamic obstacles as circles
for k = 1 : n_obsd
odh = [obs_d_v(k,1)*t(2)*(i-1)+obs_d_sp(k,1), obs_d_v(k,2)*t(2)*(i-1)+obs_d_sp(k,2) ]; % to make it easier to type
x = odh(:,1) - obs_d_s(k) : 0.001 : odh(:,1)+ obs_d_s(k);
y = (obs_d_s(k)^2 - (x - odh(:,1)).^2).^0.5 + odh(:,2); %top part of circle
y1 = -(obs_d_s(k)^2 - (x - odh(:,1)).^2).^0.5 + odh(:,2); %bottom part of circle
plot(x,y,'r');
plot(x,y1,'r');
end
end
M(i) = getframe(gcf);
end
hold off
end
⛄ 运行结果
⛄ 参考文献
[1] 杨向东,周汶锋,张陈宏,等.基于无人机倾斜摄影的三维路径规划[J].机电工程技术, 2023, 52(4):6.
[2] 张庆捷,徐华,霍得森,等.基于改进蚁群算法的侦察无人机航路规划与实现[J].运筹与管理, 2007(3):6.DOI:10.3969/j.issn.1007-3221.2007.03.019.
[3] 王绪芝,姚敏,赵敏,等.基于蚁群算法的无人机航迹规划及其动态仿真[J].指挥控制与仿真, 2012, 34(1):4.DOI:10.3969/j.issn.1673-3819.2012.01.007.
[4] 张剑锋,王新民.基于MATLAB的某无人机自动驾驶仪测试系统的实现[C]//中国航空学会轻型飞行器专业委员会2005年学术交流会.2005.
[5] 马云红,周德云.无人机路径规划算法与仿真[J].火力與指揮控制, 2007, 32.
[6] 罗诚.无人机路径规划算法研究[D].复旦大学,2010.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 382
382











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











