







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
❤️ 内容介绍
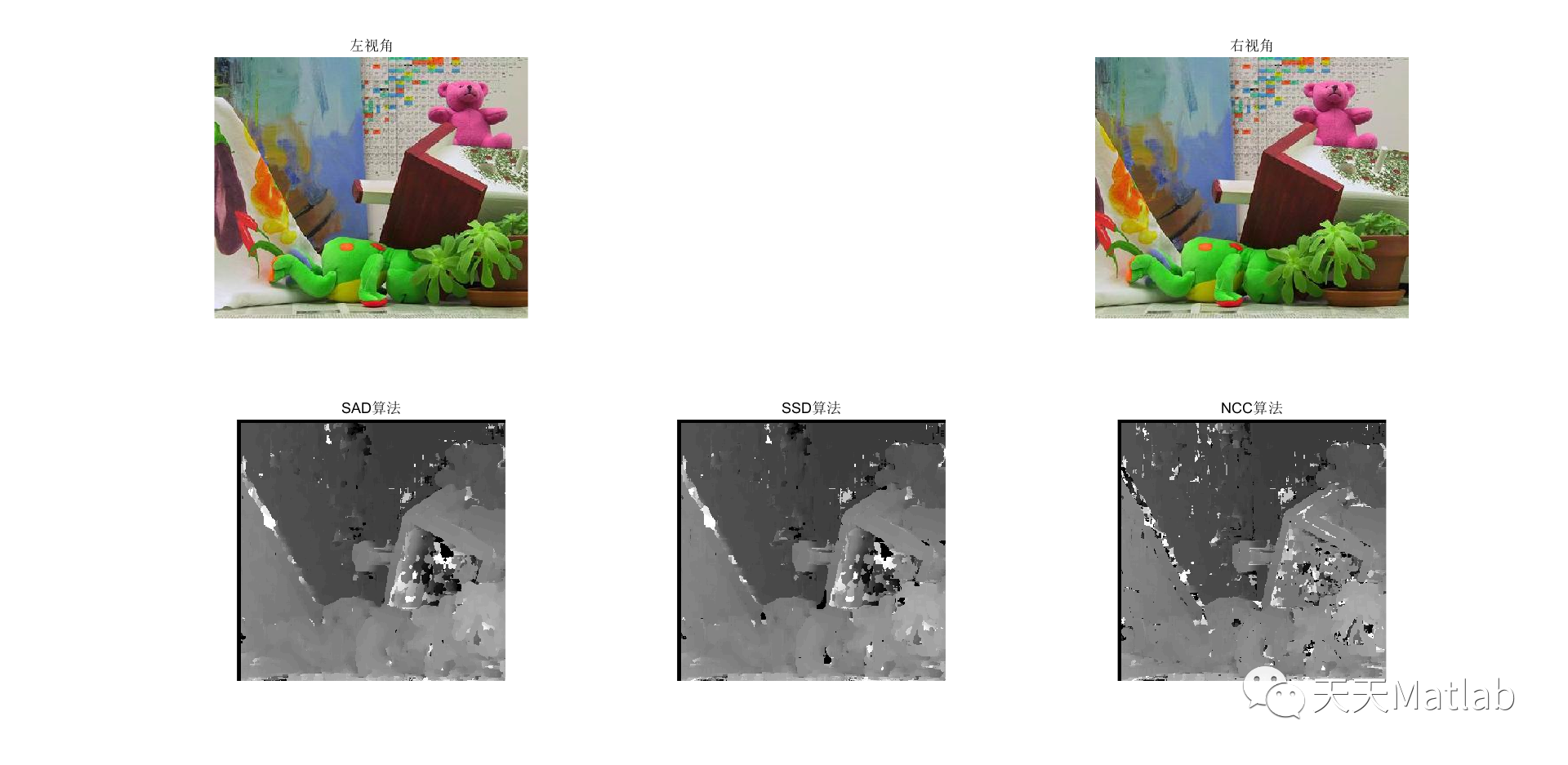
在计算机视觉领域,三维图像立体配准和融合是一项重要的任务。它涉及将多个视角下获取的图像进行配准,以获得一个准确的三维重建结果。本文将介绍基于SSD(Sum of Squared Differences)、SAD(Sum of Absolute Differences)和NCC(Normalized Cross Correlation)算法实现三维图像立体配准和融合的方法。
首先,我们需要了解什么是三维图像立体配准和融合。立体配准是指将多个视角下获取的图像进行对齐,以消除视角差异和图像畸变,从而得到一个准确的三维场景。融合是指将配准后的图像进行融合,以生成一个完整的三维重建结果。
SSD、SAD和NCC是三种常用的图像相似度度量方法,它们可以用于计算图像之间的相似度。在三维图像立体配准中,我们可以利用这些相似度度量方法来评估图像之间的差异,并找到最佳的配准变换参数。
SSD算法通过计算两个图像之间对应像素的差值的平方和来度量它们的相似度。具体而言,对于两个图像I和J,它们的SSD值可以通过以下公式计算:
SSD(I, J) = Σ(I(x, y) - J(x, y))^2
其中,I(x, y)和J(x, y)分别表示图像I和J在像素位置(x, y)处的像素值。SSD值越小,表示两个图像之间的差异越小,相似度越高。
SAD算法与SSD算法类似,但它使用的是两个图像之间对应像素的差值的绝对值之和来度量它们的相似度。具体而言,对于两个图像I和J,它们的SAD值可以通过以下公式计算:
SAD(I, J) = Σ|I(x, y) - J(x, y)|
与SSD算法相比,SAD算法更加鲁棒,对于图像中的噪声和畸变有更好的容忍度。
NCC算法通过计算两个图像之间对应像素的互相关系数来度量它们的相似度。具体而言,对于两个图像I和J,它们的NCC值可以通过以下公式计算:
NCC(I, J) = Σ(I(x, y) * J(x, y)) / √(ΣI(x, y)^2 * ΣJ(x, y)^2)
NCC值的范围在-1到1之间,值越接近1表示两个图像之间的相似度越高。
在三维图像立体配准和融合中,我们可以利用SSD、SAD和NCC算法来评估不同视角下的图像之间的相似度,并找到最佳的配准变换参数。一般来说,我们可以通过遍历不同的配准参数组合,并计算它们与参考图像之间的相似度来找到最佳的配准结果。
在获得最佳的配准结果后,我们可以将配准后的图像进行融合,以生成一个完整的三维重建结果。融合可以通过简单的像素平均或更复杂的图像融合算法来实现。
总结起来,基于SSD、SAD和NCC算法实现三维图像立体配准和融合是一项重要的任务。这些算法可以帮助我们评估图像之间的相似度,并找到最佳的配准变换参数。通过配准和融合,我们可以获得一个准确的三维重建结果,为计算机视觉和图像处理领域的研究和应用提供基础。
🔥核心代码
%function StereoMatching()%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% This function consits of three methods for stereo matching (SAD,SSD,NCC).% Usage% 1. A input dialog will appear for setting Window Size. Set a% number bigger than 2, and click OK button.% 2. Wait for some seconds. Then, you can see the results of SAD, SSD and% NCC stereo mathing in order.%% You can also compare the results by changing window size !%% InYeop,Jang(20082044), Dept.of Mechatronics, GIST%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%function StereoMatchingprompt = {'Enter window size:'};dlg_title = 'Input for setting window size';num_lines = 1;def = {'9'};answer=inputdlg(prompt,dlg_title,num_lines,def);winSize = str2double(answer);if(winSize>2)fprintf(1,'Loading Images....\n');imL=rgb2gray(imread('imL.jpg'));imL=double(imL);imR=rgb2gray(imread('imR.jpg'));imR=double(imR);%groundtruth=imread('disp2.pgm');%groundtruth=double(groundtruth);figuresubplot(2,3,1); imshow('imL.jpg'); title('左视角');subplot(2,3,3); imshow('imR.jpg'); title('右视角');fprintf(1,'Now Processing SAD based Stereo Matching....\n');[dispMap_SAD]=StereoMatchingSAD(imL,imR,winSize,0,52);dispMap1=dispMap_SAD;%figure('Name','SAD','NumberTitle','off');subplot(2,3,4); imshow(dispMap1,[0 52]);title('SAD算法');%fprintf(1,'SAD RMSE : %f\n',sqrt( (mean( dispMap)-groundtruth).^2));fprintf(1,'Now Processing SSD based Stereo Matching....\n');[dispMap_SSD]=StereoMatchingSSD(imL,imR,winSize,0,52);dispMap2=dispMap_SSD;%figure('Name','SSD','NumberTitle','off');subplot(2,3,5); imshow(dispMap2,[0 52]); title('SSD算法');fprintf(1,'Now Processing NCC based Stereo Matching....\n');[dispMap_NCC]=StereoMatchingNCC(imL,imR,winSize,0,52);dispMap3=dispMap_NCC;%figure('Name','NCC','NumberTitle','off');subplot(2,3,6); imshow(dispMap3,[0 52]); title('NCC算法');elsefprintf(1,'\nYou must set window-size integer bigger than 2!!!!\n');end
❤️ 运行结果
⛄ 参考文献
[1] 彭鳒侨,丘红英,董伟强,等.基于"9点3面"配准方案的[PT+CT]异机三维图像融合实验[J].中国医疗器械信息, 2011, 017(006):1-5.DOI:10.3969/j.issn.1006-6586.2011.06.001.
[2] 彭鳒侨,鞠向阳,白波,等.基于"9点3面"配准方案的CT+MR异机三维图像融合研究[J].中国临床解剖学杂志, 2011, 29(4):5.DOI:CNKI:SUN:ZLJZ.0.2011-04-020.
[3] 卢欣龙.基于DM6467的图像配准和融合算法的研究[D].南京理工大学[2023-09-04].
[4] 宋毅,崔平远,居鹤华.一种图像匹配中SSD和NCC算法的改进[J].计算机工程与应用, 2006, 42(2):42-44.DOI:10.3321/j.issn:1002-8331.2006.02.013.
















 1464
1464

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











