







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
❤️ 内容介绍
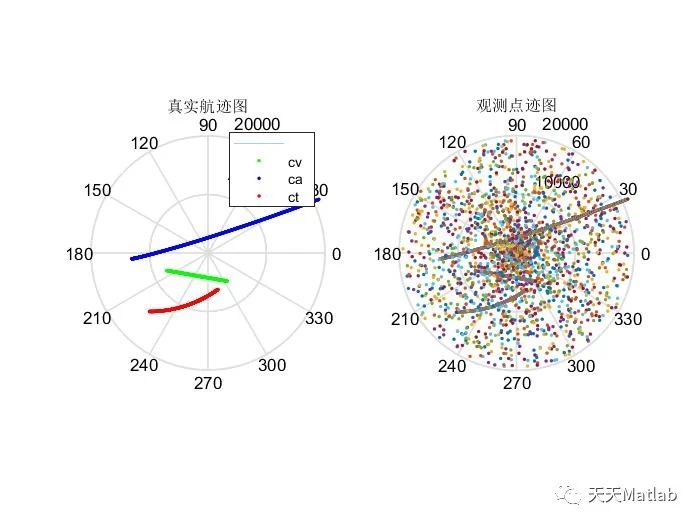
在运动学中,我们经常使用不同的运动模型来描述物体的运动轨迹。在计算机视觉领域,CV(常速度)、CA(常加速度)和CT(常转弯率)是三种常见的运动模型。本文将详细介绍这三种模型,并讨论它们在轨迹预测和目标跟踪中的应用。
-
CV模型(Constant Velocity)
CV模型假设物体在运动过程中保持恒定的速度。这意味着物体的位置随时间线性变化。CV模型的数学表示如下:
x(t) = x(0) + v*t
其中,x(t)是物体在时间t时刻的位置,x(0)是初始位置,v是恒定的速度。
CV模型的优点是简单且易于实现。它适用于描述匀速直线运动的物体,如行人、车辆等。然而,CV模型无法捕捉到加速度和转弯的变化,因此在某些情况下可能不够准确。
-
CA模型(Constant Acceleration)
CA模型假设物体在运动过程中保持恒定的加速度。这意味着物体的速度随时间线性变化,位置随时间二次变化。CA模型的数学表示如下:
x(t) = x(0) + v*t + (1/2)at^2
其中,a是恒定的加速度。
CA模型比CV模型更加复杂,但也更加准确。它适用于描述加速度变化的物体,如运动车辆、飞机等。CA模型可以预测物体的位置和速度,并提供更准确的轨迹预测。
-
CT模型(Constant Turn Rate)
CT模型假设物体在运动过程中保持恒定的转弯率。这意味着物体的转向角速度随时间恒定,位置和速度随时间非线性变化。CT模型的数学表示如下:
x(t) = x(0) + v*(sin(ψ(t)) - sin(ψ(0)))/ω
y(t) = y(0) - v*(cos(ψ(t)) - cos(ψ(0)))/ω
其中,(x(t), y(t))是物体在时间t时刻的位置,(x(0), y(0))是初始位置,v是恒定的速度,ψ(t)是物体在时间t时刻的转向角度,ψ(0)是初始转向角度,ω是恒定的转弯率。
CT模型是描述弯道运动的理想选择,如飞机的曲线飞行或车辆的弯道行驶。它可以更准确地预测物体的位置和速度,并提供更真实的轨迹模拟。
在计算机视觉中,CV、CA和CT模型在目标跟踪和轨迹预测中发挥着重要的作用。根据物体的运动特征和场景需求,选择合适的模型可以提高跟踪和预测的准确性。
总结起来,CV模型适用于描述匀速直线运动,CA模型适用于描述加速度变化,CT模型适用于描述弯道运动。了解这三种运动模型的特点和应用场景,有助于我们更好地理解和应用运动学原理,提高计算机视觉领域的相关技术。
🔥核心代码
% 跟踪函数function data = simutrack_cv(x0, y0, z0, v0, theta, phi, sigma_ax, sigma_ay, sigma_az, sigma_r, sigma_theta, sigma_phi, sigma_v, T, N)%simutrack 仿真带加速度扰动的匀速直线运动目标的二维航迹.%% 'x0' 目标在x方向上的初始位置% 'y0' 目标在y方向上的初始位置% 'z0' 目标在z方向上的初始位置% 'v0' 目标运动方向上的初始速度% 'theta' 目标初始运动方向与x轴的夹角% 'phi' 目标初始运动方向与xy平面的夹角% 'sigma_ax' x轴方向的随机加速度(过程噪声)% 'sigma_ay' y轴方向的随机加速度(过程噪声)% 'sigma_az' z轴方向的随机加速度(过程噪声)% 'sigma_r' 极坐标下距离的测量标准差% 'sigma_theta' 极坐标下方位的测量标准差,单位度% 'sigma_phi' 极坐标下俯仰的测量标准差,单位度% 'sigma_v' 极坐标下径向速度的测量标准差% 'T' 雷达扫描周期% 'N' 采样点数% 'data' 仿真得到的N点目标航迹[斜距 方位角 俯仰角 径向速度]% 角度转变为弧度theta = theta*pi/180;phi=phi*pi/180;% xyz方向上的初始速度vx0 = v0 * cos(theta)*cos(phi);vy0 = v0 * sin(theta)*cos(phi);vz0 = v0 * sin(phi);% 状态转移矩阵F = [1 T 0 0 0 0; 0 1 0 0 0 0; 0 0 1 T 0 0 ; 0 0 0 1 0 0;0 0 0 0 1 T;0 0 0 0 0 1];% 过程噪声分布矩阵Tao = [T^2/2 0 0;T 0 0;0 T^2/2 0 ; 0 T 0;0 0 T^2/2;0 0 T];% 测量矩阵% H = [1 0 0 0 0 0;0 0 1 0 0 0;0 0 0 0 0 1 ];% 构造真实航迹X(:,1) = [x0 vx0 y0 vy0 z0 vz0]';for m = 2:NX(:,m) = F*X(:,m-1)+Tao*[sigma_ax*randn(1) sigma_ay*randn(1) sigma_az*randn(1)]'; %N个点迹的坐标end% 极坐标下的数值r0 = sqrt(X(1,:).^2+X(3,:).^2+X(5,:).^2); %斜距theta0 = atan(X(3,:)./X(1,:))*180/pi; %方位角phi0 = atan(X(5,:)./sqrt(X(1,:).^2+X(3,:).^2))*180/pi; %俯仰角vr0 = -(X(1,:).*X(2,:)+X(3,:).*X(4,:)+X(5,:).*X(6,:))./r0; %径向速度for i=1:Nif(X(1,i)>=0&&X(3,i)>0)theta0(i)=theta0(i);else if(X(1,i)>=0&&X(3,i)<0)theta0(i)=theta0(i)+360;elsetheta0(i)=theta0(i)+180;endendend% 加高斯观测噪声r = r0 + sigma_r*randn(1,N);theta = theta0 + sigma_theta*randn(1,N);phi = phi0+sigma_phi*randn(1,N);vr = vr0+sigma_v*randn(1,N);data = [r', theta',phi',vr'];
❤️ 运行结果
⛄ 参考文献
[1] 王耀林、盖梦欧、周敏.IMM算法在空中复杂机动目标跟踪中的应用[J].现代信息科技, 2020, 4(13):3.DOI:CNKI:SUN:XDXK.0.2020-13-003.
[2] 刘成成.复杂环境下强机动目标跟踪算法研究[D].上海交通大学[2023-09-09].DOI:CNKI:CDMD:2.1015.806555.
[3] 潘雁鹏.基于时差量测的目标定位与跟踪算法研究[D].西安电子科技大学,2020.
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











