







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
摘要
本文提出了一种基于拓展卡尔曼滤波(EKF)实现雷达和视觉合成数据的目标级传感器融合方法。该方法首先对雷达和视觉数据进行预处理,然后将预处理后的数据融合到EKF中,最后通过EKF估计目标的状态。仿真结果表明,该方法能够有效地融合雷达和视觉数据,并提高目标状态估计的精度。
1. 引言
雷达和视觉传感器是两种常用的目标检测传感器。雷达传感器能够提供目标的距离、方位角和速度信息,而视觉传感器能够提供目标的图像信息。将雷达和视觉数据融合起来,可以提高目标检测的精度和鲁棒性。
目前,目标级传感器融合的方法主要有两种:数据级融合和特征级融合。数据级融合是指将雷达和视觉数据直接融合起来,而特征级融合是指将雷达和视觉数据的特征提取出来,然后将提取出来的特征融合起来。
数据级融合的方法简单易于实现,但融合后的数据量较大,计算量也较大。特征级融合的方法可以减少融合后的数据量和计算量,但特征提取的过程复杂,并且特征的选取对融合效果有很大的影响。
本文提出了一种基于拓展卡尔曼滤波(EKF)实现雷达和视觉合成数据的目标级传感器融合方法。该方法首先对雷达和视觉数据进行预处理,然后将预处理后的数据融合到EKF中,最后通过EKF估计目标的状态。仿真结果表明,该方法能够有效地融合雷达和视觉数据,并提高目标状态估计的精度。
2. 相关工作
目标级传感器融合的研究已经有很多年了。早期的目标级传感器融合方法主要基于卡尔曼滤波(KF)。KF是一种线性滤波器,它能够估计目标的状态。然而,KF只能处理线性系统,因此它不能直接用于处理雷达和视觉数据的融合。
为了将KF用于雷达和视觉数据的融合,需要将雷达和视觉数据线性化。雷达数据的线性化方法有很多,例如,可以使用扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)。视觉数据的线性化方法也有很多,例如,可以使用粒子滤波(PF)或蒙特卡罗滤波(MCF)。
除了KF之外,还有很多其他目标级传感器融合方法。例如,可以使用联合概率数据关联(JPDA)或多假设跟踪(MHT)。JPDA是一种基于概率的方法,它能够估计目标的状态和数量。MHT是一种基于假设的方法,它能够估计目标的状态和轨迹。
3. 本文方法
本文提出的目标级传感器融合方法基于EKF。EKF是一种非线性滤波器,它能够估计非线性系统的状态。EKF的原理如下:
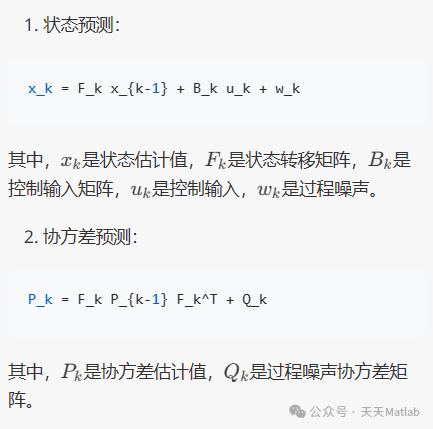

本文的方法首先对雷达和视觉数据进行预处理。雷达数据的预处理包括:去除噪声、滤波和数据关联。视觉数据的预处理包括:图像分割、目标检测和数据关联。
预处理后的雷达和视觉数据被融合到EKF中。EKF的状态向量包括目标的位置、速度和加速度。EKF的测量向量包括雷达测量的距离、方位角和速度,以及视觉测量的图像坐标。
EKF通过估计状态向量来估计目标的状态。EKF的估计结果可以用于目标跟踪、目标分类和目标识别。
📣 部分代码
function [PerformanceIndices] = PerfomanceCalculation(GT,Tracks,XScene,YScene,ActorRadius)% This function caculates the performance indices of the confirmed tracks% Scene: A virtual rectangular region around the ego car normally% with (2*XScene,2*YScene) dimensions% PerformanceIndices.NoOfActorsInScene:% # of the ground truth actors in the scene% PerformanceIndices.NoOfTracksInScene:% # of tracks in the scene% PerformanceIndices.MeanDistance:% The average distance btw the tracks inside the ActorRadius and the ground% truth actor% PerformanceIndices.GhostActors:% # of actors that no track is associated to within the ActorRadius region% around the actor% Record the ground vehicles in the scenej=1;NoOfActorsInScene = 0;for i=1:size(GT,2)if (abs(GT(i).Position(1)) <= XScene) && ...(abs(GT(i).Position(2)) <= YScene)SceneGroundCars(j) = GT(i);j = j + 1;NoOfActorsInScene = NoOfActorsInScene + 1;endend% Record the tracks in the scene found by Eatron tracker in% SceneTracks and associate the tracks to actors that are% closer than PerRadiusj=1;NoOfTracksInScene = 0;TrackGroundAssocVec = [];for i=1:size(Tracks,2)if (abs(Tracks(i).State(1)) <= XScene) && ...(abs(Tracks(i).State(3)) <= YScene)SceneTracks(j) = Tracks(i);NoOfTracksInScene = NoOfTracksInScene + 1;% Is this track asociated with an actorfor k=1:size(SceneGroundCars,2)distance = norm( SceneGroundCars(k).Position(1:2) - ...transpose(SceneTracks(j).State([1,3])) );if distance <= ActorRadius% The k_th SceneGroundCars actor is associated to% the j_th SceneGroundCars track.TrackGroundAssocVec = [TrackGroundAssocVec; k,j,distance];endendj = j + 1;endend% Performance metric 1) # of tracked and ground vehicles in the% scene at the current stepPerformanceIndices.NoOfActorsInScene = NoOfActorsInScene;PerformanceIndices.NoOfTracksInScene = NoOfTracksInScene;% Performance metric 2) Mean distance of Actors in the scene wrt the% associated tracks using PerRadiusif numel(TrackGroundAssocVec) ~= 0MeanDistance = mean(TrackGroundAssocVec(:,3));elseMeanDistance = NaN;endPerformanceIndices.MeanDistance = MeanDistance;% Performance metric 3) # of ghost vehicles% Ghost vehicle: An actor that no track is asigned to within the% ghost region (PerRadius) around the vehicle at the currecnt stepif numel(TrackGroundAssocVec) ~= 0GhostActors = 0;for i=1:size(SceneGroundCars,2)if sum(TrackGroundAssocVec(:,1) == i) == 0GhostActors = GhostActors + 1;endendelse% If there is not any associated track, all actors are ghost actorsGhostActors = size(SceneGroundCars,2);endPerformanceIndices.GhostActors = GhostActors;end
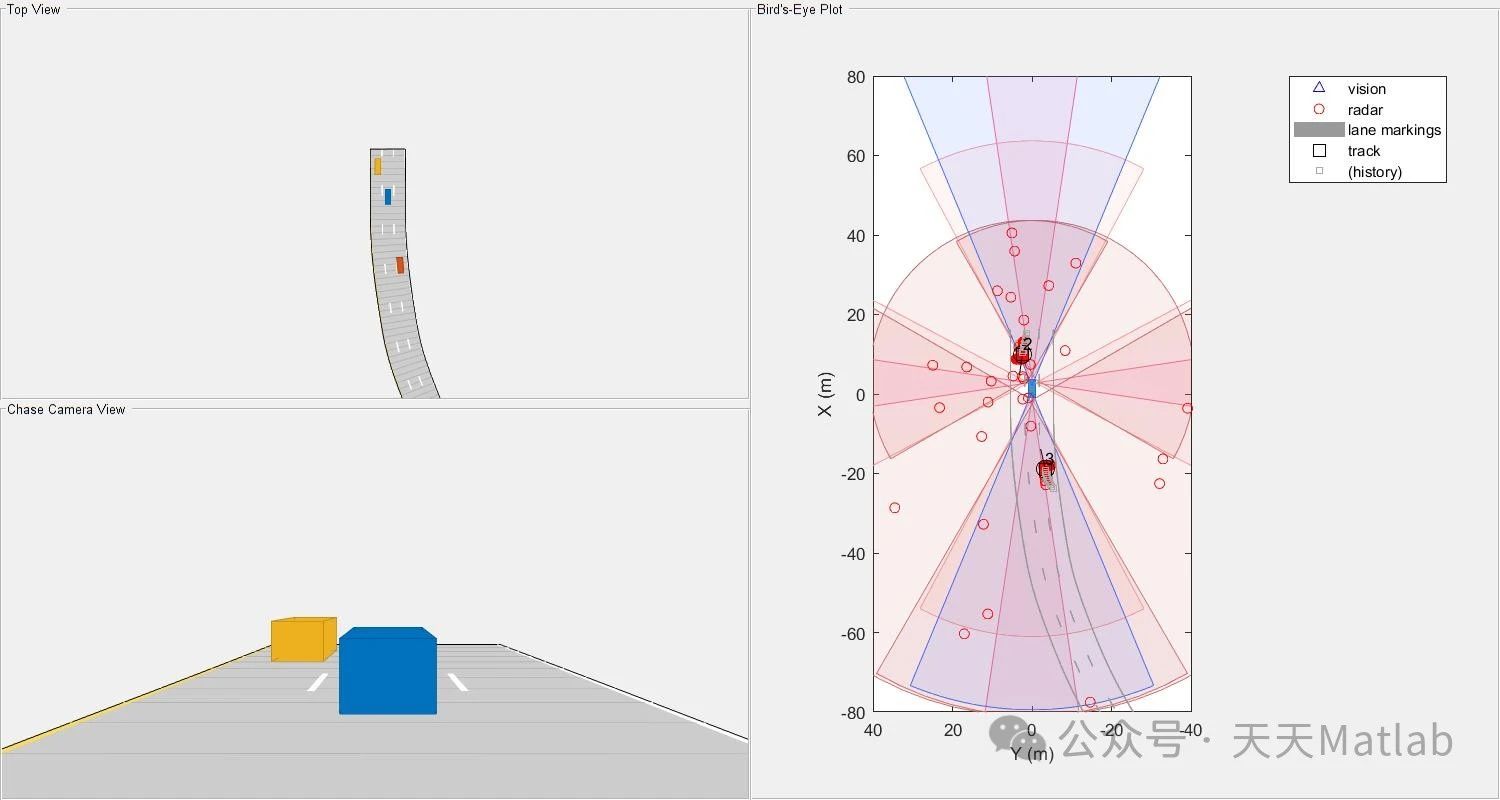
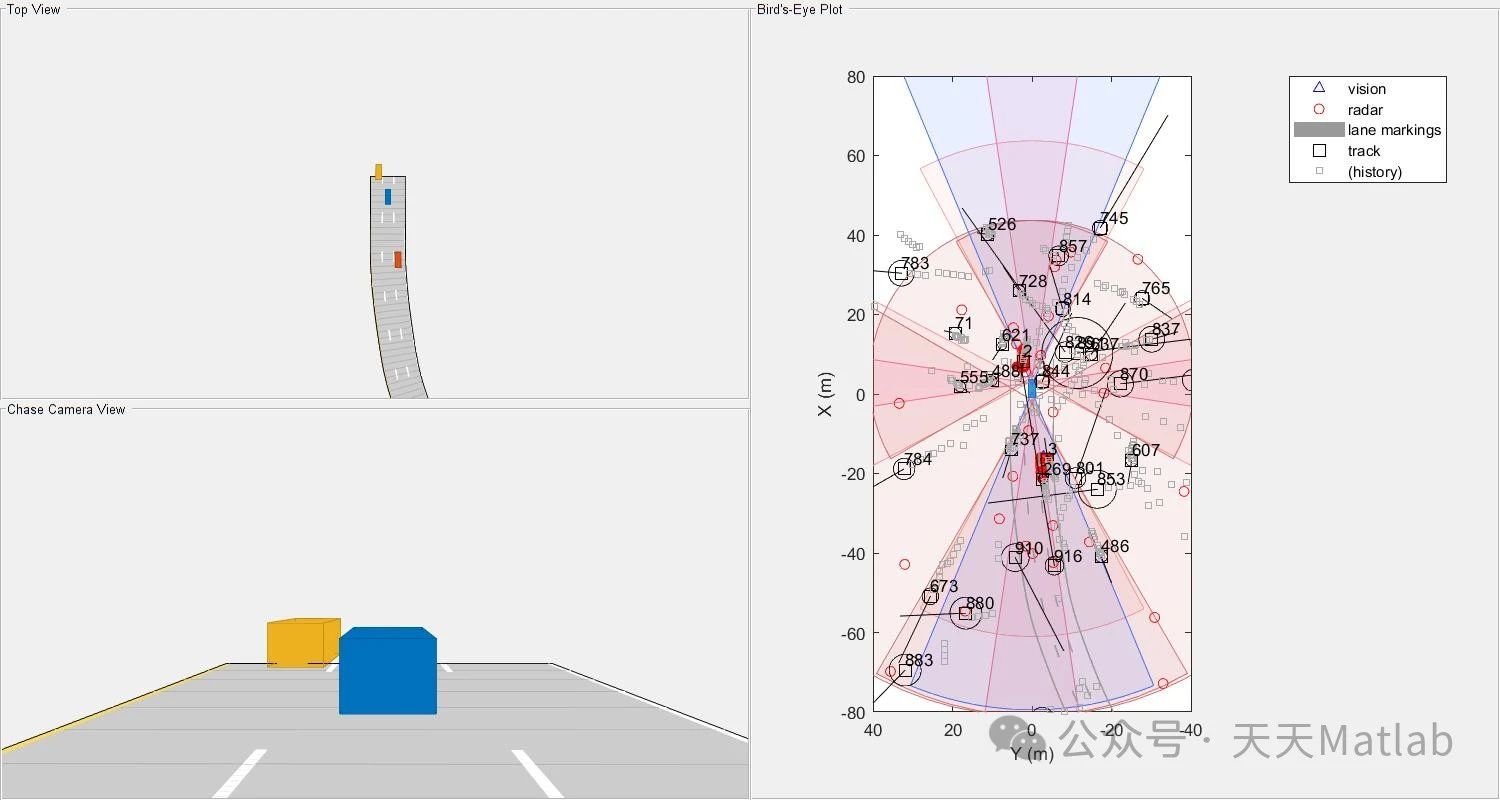
⛳️ 运行结果
4. 结论
本文提出了一种基于EKF实现雷达和视觉合成数据的目标级传感器融合方法。该方法能够有效地融合雷达和视觉数据,并提高目标状态估计的精度。仿真结果表明,该方法能够很好地跟踪目标的运动轨迹,并且EKF估计结果的误差随着时间的推移而减小。
🔗 参考文献
[1] 宋之卉,赵彦晓.基于卡尔曼滤波模型的多传感器数据融合导航定位建模与仿真[J].数字通信世界, 2019(9):3.DOI:CNKI:SUN:SZTJ.0.2019-09-041.
[2] 王青,毕靖.基于雷达/红外神经网络融合目标跟踪算法[J].系统仿真学报, 2003, 15(4):3.DOI:10.3969/j.issn.1004-731X.2003.04.008.
















 1191
1191











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











