







个人复习笔记,如有错误欢迎批评指正
第三章 图像变换
图像变换的目的:
- ①使图像处理问题简化
- ②有利于图像特征提取
- ③有利于从概念上增强对图像信息的理解
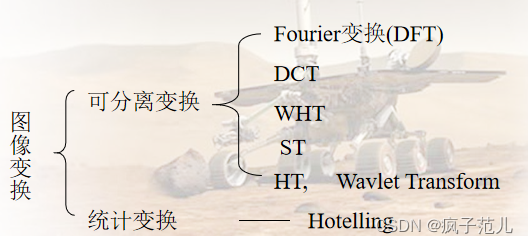
图像变换通常是一种二维正交变换。一般要求:
- ①正交变换必须是可逆的;
- ②正变换和反变换的算法不能太复杂;
- ③正交变换的特点是在变换域中图像能量将集中分布在低频率成分上,边缘、线状信息反映在高频率成分上,有利于图像处理
【1】傅里叶变换
1、理论基础
【线性系统】对于某特定系统,有:
x1(t)——>y1(t)
x2(t)——>y2(t)
该系统是线性的当且仅当:
x1(t) + x2(t)——>y1(t) + y2(t)
从而有: ——>a × x1(t) a × y1(t)
【线性系统移不变性】对于某线性系统,有:
x(t)——>y(t)
当输入信号沿时间轴平移T,有:
x(t - T)——>y(t - T)
则称该线性系统具有移不变性
2、卷积
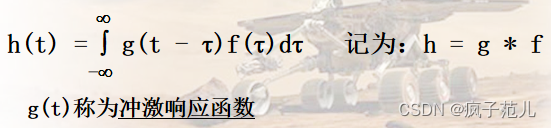
【一维卷积定义】
【离散一维卷积】

【二维卷积定义】
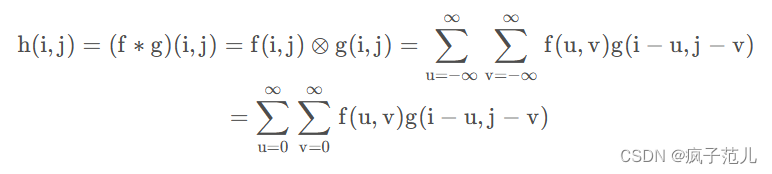
 【离散二维卷积】
【离散二维卷积】
3、连续与离散的傅里叶变换
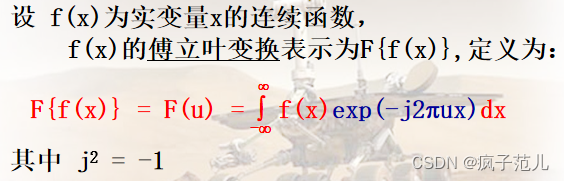
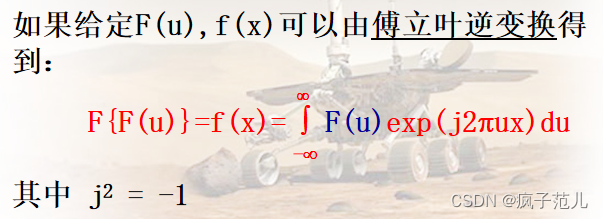
【一维连续傅里叶变换】
【一维连续傅里叶逆变换】
【几个概念】
假设函数f(x)为实函数。但一个实函数的傅立叶变换可能为复函数:
F
(
u
)
=
R
(
u
)
+
j
I
(
u
)
F(u) = R(u) + jI(u)
F(u)=R(u)+jI(u)
-
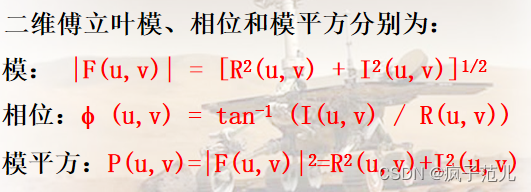
f(x)的傅立叶模记为: ∣ F ( u ) ∣ |F(u)| ∣F(u)∣
∣ F ( u ) ∣ = [ R 2 ( u ) + I 2 ( u ) ] 1 2 |F(u)| = [R^2(u) + I^2(u)]^\frac{1}{2} ∣F(u)∣=[R2(u)+I2(u)]21 -
f(x)的傅立叶模平方记为: ∣ P ( u ) ∣ |P(u)| ∣P(u)∣
∣ P ( u ) ∣ = ∣ F ( u ) ∣ 2 = R 2 ( u ) + I 2 ( u ) |P(u)| = |F(u)|^2 = R^2(u) + I^2(u) ∣P(u)∣=∣F(u)∣2=R2(u)+I2(u) -
f(x)的傅立叶相位记为: ϕ ( u ) \phi(u) ϕ(u)
ϕ ( u ) = I ( u ) / R ( u ) t a n \phi(u) = \frac{I(u) / R(u)}{tan} ϕ(u)=tanI(u)/R(u) -
傅立叶变换中的变量 u u u通常称为频率变量
这个名称源于尤拉公式中的指数项
e x p [ − j 2 π u x ] = c o s 2 π u x − j s i n 2 π u x exp[-j2\pi ux] = cos2\pi ux - j sin2\pi ux exp[−j2πux]=cos2πux−jsin2πux
【二维连续傅里叶变换】
【离散傅里叶变换】
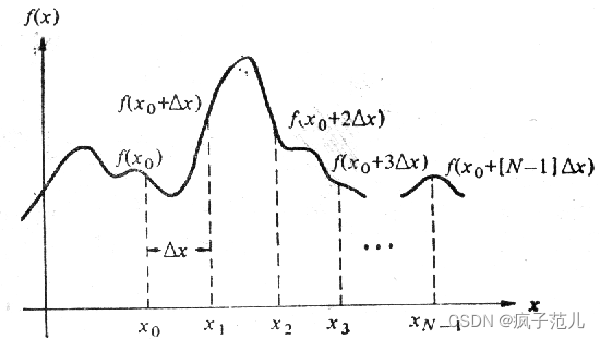
假设连续函数
f
(
x
)
f(x)
f(x)通过取N个
Δ
x
\Delta x
Δx单位的采样点,被离散化为一个序列:
f
(
x
0
)
,
f
(
x
0
+
Δ
x
)
,
.
.
.
,
f
(
x
0
+
(
N
−
1
)
Δ
x
)
f(x_0),f(x_0+\Delta x), ... ,f(x_0+(N-1)\Delta x)
f(x0),f(x0+Δx),...,f(x0+(N−1)Δx)
[表示相对与连续函数的任意N个统一的空间采样]
无论将x作为离散的或连续的变量,在子序列中来研究都将是方便的,仅仅依赖于讨论的上下文。为作到此要求定义:
f
(
x
)
=
f
(
x
0
+
x
Δ
x
)
f(x) = f(x_0+ x\Delta x)
f(x)=f(x0+xΔx)
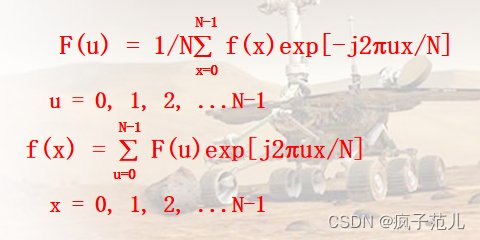
[离散傅里叶变换对]
(变换)
F
(
u
)
=
1
N
∑
x
=
0
N
−
1
f
(
x
)
e
x
p
(
−
2
j
π
u
x
/
N
)
F(u) = \frac{1}{N} \sum \limits _{x=0}^{N-1}f(x)exp \big(-2j\pi ux/N\big)
F(u)=N1x=0∑N−1f(x)exp(−2jπux/N) u = 0,1,2,…,N-1
(逆变换)
f
(
x
)
=
∑
u
=
0
N
−
1
F
(
u
)
e
x
p
(
2
j
π
u
x
/
N
)
f(x) = \sum \limits _{u=0}^{N-1}F(u)exp \big(2j\pi ux/N\big)
f(x)=u=0∑N−1F(u)exp(2jπux/N) u = 0,1,2,…,N-1
[离散傅里叶变换:二维]
(变换)
F
(
u
,
v
)
=
1
M
N
∑
x
=
0
,
y
=
0
M
−
1
,
N
−
1
f
(
x
)
e
x
p
(
−
2
j
π
(
u
x
/
N
+
v
y
/
N
)
)
F(u,v) = \frac{1}{MN} \sum \limits _{x=0,y=0}^{M-1,N-1}f(x)exp \big(-2j\pi (ux/N + vy/N)\big)
F(u,v)=MN1x=0,y=0∑M−1,N−1f(x)exp(−2jπ(ux/N+vy/N))
u = 0,1,2,…,M-1;v = 0,1,2,…,N-1
(逆变换)
f
(
x
,
y
)
=
∑
x
=
0
,
y
=
0
M
−
1
,
N
−
1
f
(
x
)
e
x
p
(
2
j
π
(
u
x
/
M
+
v
y
/
N
)
)
f(x,y) =\sum \limits _{x=0,y=0}^{M-1,N-1}f(x)exp \big(2j\pi (ux/M + vy/N)\big)
f(x,y)=x=0,y=0∑M−1,N−1f(x)exp(2jπ(ux/M+vy/N))
x = 0,1,2,…,M-1;y = 0,1,2,…,N-1
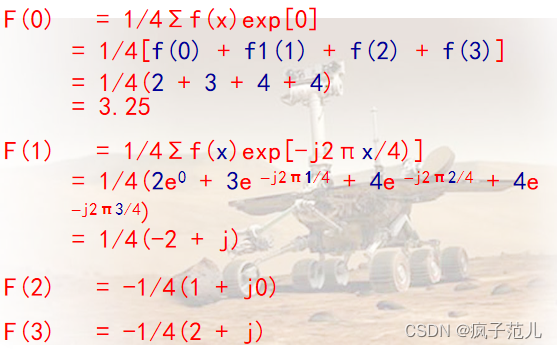
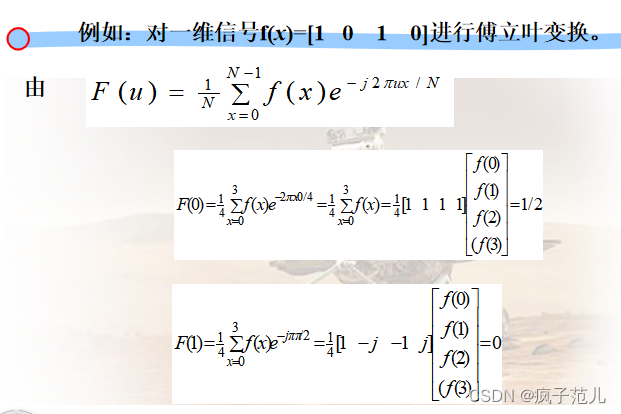
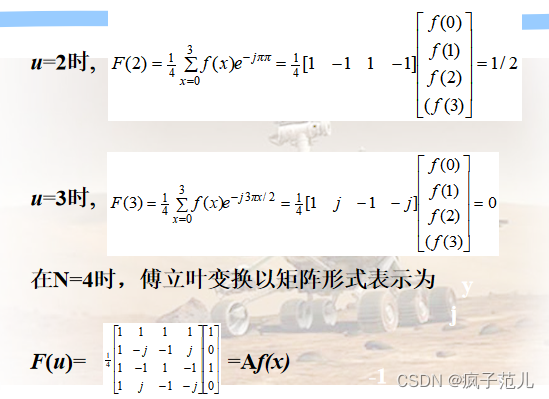
【离散傅里叶变换的计算与显示】
[离散傅里叶交换的计算举例]
①
②
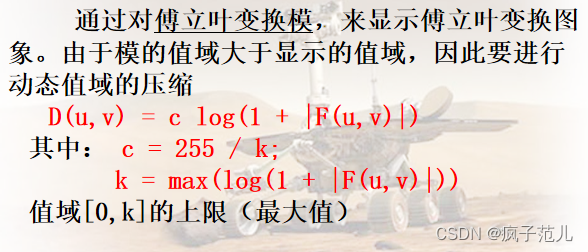
[离散傅里叶交换的显示]
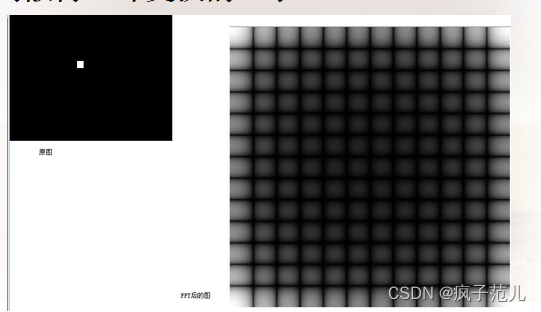
【2】频域变换:二维傅里叶变换特性
1、可分离性
二维离散傅立叶变换可分离性的基本思想是: 二维DFT可分离为两次一维DFT
应用:二维快速傅立叶算法FFT ,是通过计算两次一维FFT实现的
【可分离性定义】
F
(
u
,
v
)
=
1
M
N
∑
x
=
0
,
y
=
0
M
−
1
,
N
−
1
[
∑
f
(
x
,
y
)
e
x
p
(
−
2
j
π
v
y
/
N
)
]
e
x
p
(
−
2
j
π
u
x
/
M
)
F(u,v) = \frac{1}{MN} \sum \limits _{x=0,y=0}^{M-1,N-1}[\sum f(x,y)exp(-2j\pi vy/N)]exp \big(-2j\pi ux/M\big)
F(u,v)=MN1x=0,y=0∑M−1,N−1[∑f(x,y)exp(−2jπvy/N)]exp(−2jπux/M) u = 0,1,2,…,M-1;v = 0,1,2,…,N-1
f
(
x
,
y
)
=
∑
u
=
0
,
v
=
0
M
−
1
,
N
−
1
[
∑
F
(
u
,
v
)
e
x
p
(
2
j
π
v
y
/
N
)
]
e
x
p
(
2
j
π
u
x
/
M
)
f(x,y) =\sum \limits _{u=0,v=0}^{M-1,N-1}[\sum F(u,v) exp(2j\pi vy/N)]exp \big(2j\pi ux/M\big)
f(x,y)=u=0,v=0∑M−1,N−1[∑F(u,v)exp(2jπvy/N)]exp(2jπux/M) u = 0,1,2,…,M-1;v = 0,1,2,…,N-1
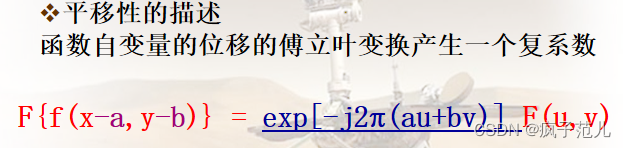
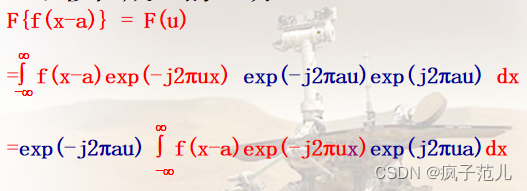
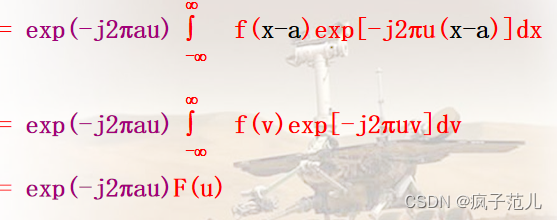
2、平移性定理
【证明】
下式中蓝色部分=1
3、周期与共轭对称
【周期性】离散傅立叶变换DFT和它的逆变换是以N为周期的
【共轭对称性】傅立叶变换结果是以原点为中心的共轭对称函数
4、旋转特性
- 如果f(x,y)旋转了一个角度 α \alpha α ,那么f(x,y)旋转后的图象的傅立叶变换也旋转了相同的角度 α \alpha α
- 对图像的旋转变换和傅立叶变换的顺序是可交换的 F [ R [ f ( x , y ) ] ] ⇔ R [ F [ f ( x , y ) ] ] F[R[f(x,y)]] \Leftrightarrow R[F[f(x,y)]] F[R[f(x,y)]]⇔R[F[f(x,y)]]
5、线性与相似性
【线性】:傅立叶变换是线性系统、函数和的傅立叶变换是可分离的
【相似性】
6、均值性
离散函数的均值等于该函数傅立叶变换在(0,0)点的值
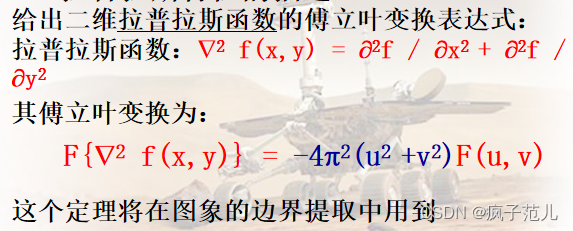
7、拉普拉斯
8、卷积与相关
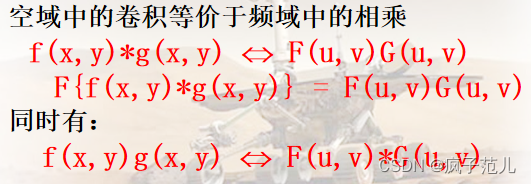
!!!空域和频域之间的基本联系
【卷积】
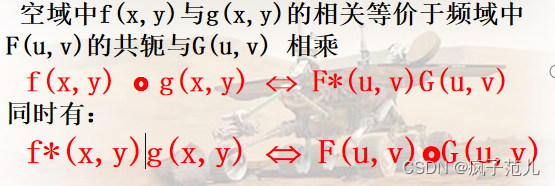
【相关】
【3】频域变换:FFT
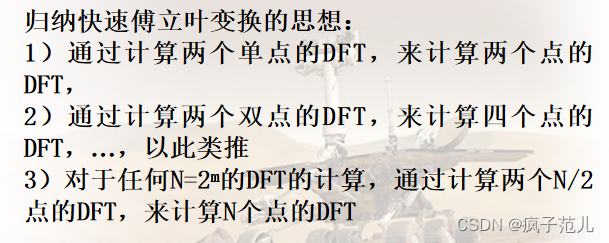
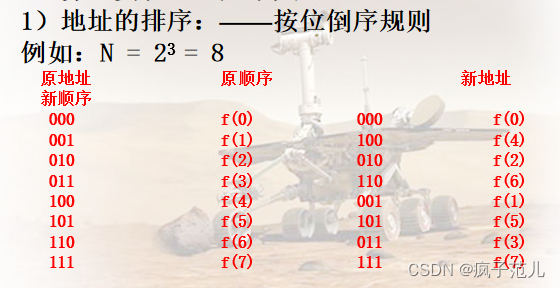
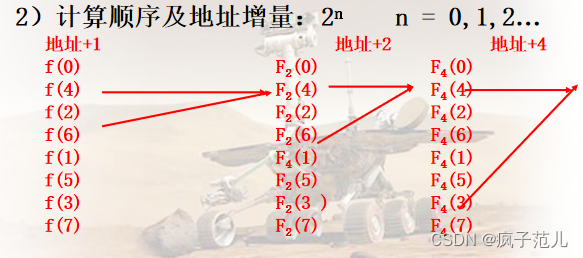
【基本思想】FFT算法基于一个叫做递推加倍的方法
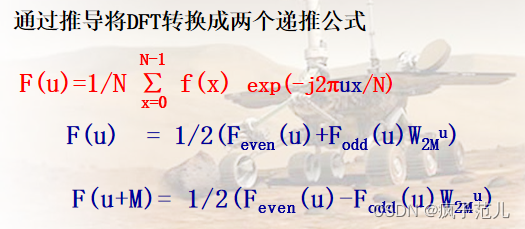

通过一个实例来体会一下FFT算法:
设:有函数f(x),其 N = 23 = 8
有:{f(0), f(1), f(2), f(3), f(4), f(5), f(6), f(7)}
计算:{F(0), F(1), F(2), F(3), F(4), F(5), F(6),F(7)}
-
首先分成奇偶两组:
有:{ f(0), f(2), f(4), f(6) }
{ f(1), f(3), f(5), f(7) } -
为了利用递推特性,再分成两组:
有:{ f(0), f(4) }, { f(2), f(6) }
{ f(1), f(5) }, { f(3), f(7) }
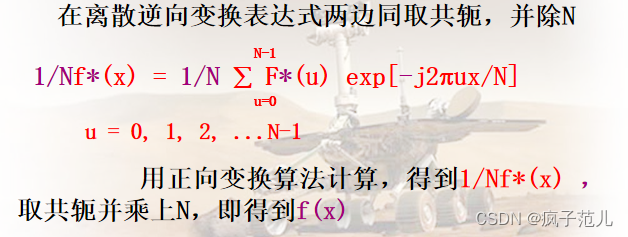
【逆向FFT算法】用正向变换计算逆向变换
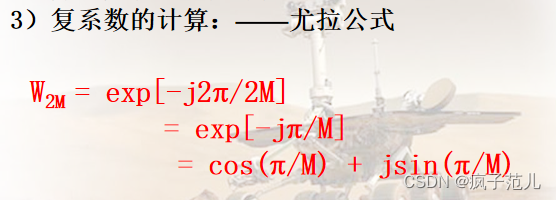
【几个关键的点】
【4】Walsh和Hadamard交换
1、Walsh交换
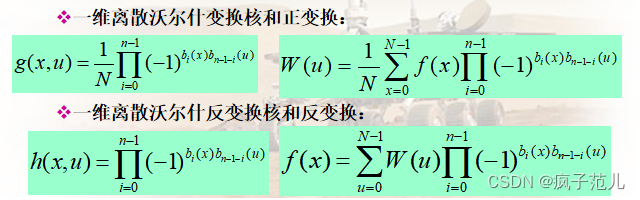
【离散Walsh交换】
- 包括只有+1和-1两个数值;
- 完备正交基,计便于算机处理
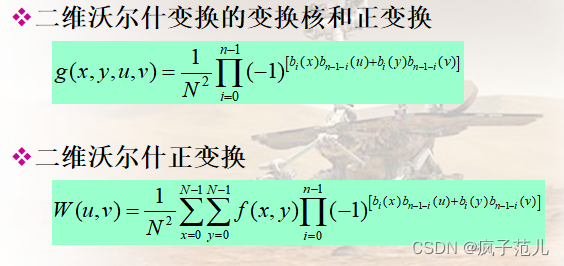
【一维离散Walsh交换】
【二维离散Walsh交换】
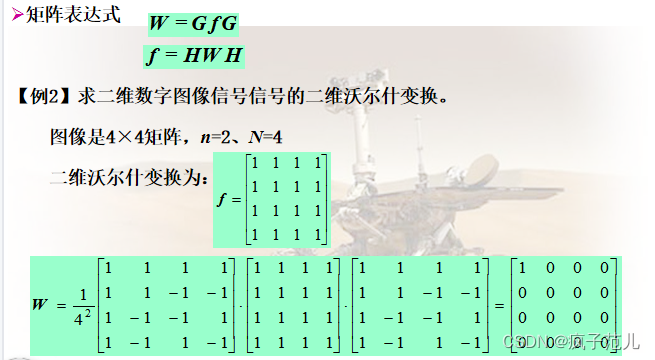
【例题】
2、Hadamard交换
- Hadamard变换本质上是一种特殊排序的Walsh变换;
- Hadamard变换核矩阵是一个方阵,只包括+1和-1两个矩阵元素;
- Hadamard变换核矩阵的各行或各列之间彼此是正交的;
- Hadamard变换核矩阵与Walsh变换不同之处仅仅是行的次序不同;
- Hadamard变换核矩阵具有简单的递推关系,即高阶矩阵可以用二个低阶矩阵求得
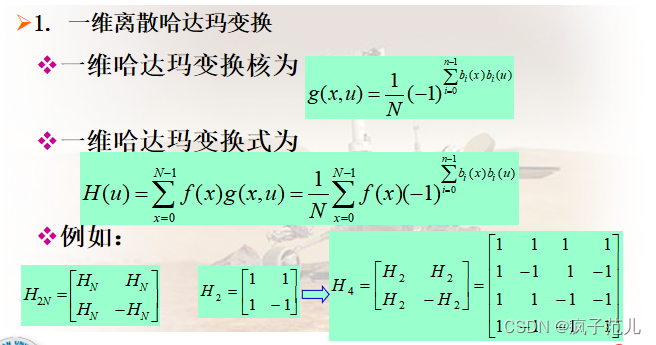
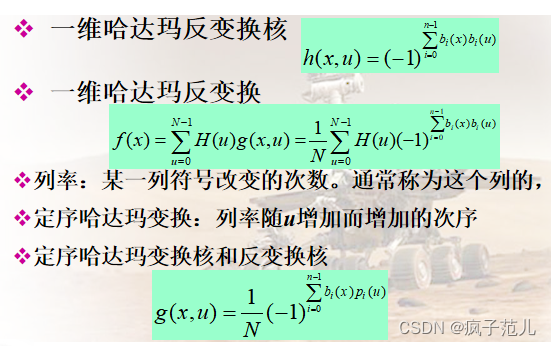
【一维离散Hadamard交换】
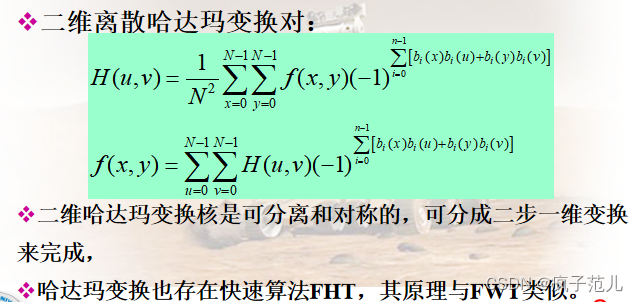
【二维离散Hadamard交换】















 5798
5798











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









