







继上一章的最少拍控制系统的设计,本章主要分析上一章设计中出现的问题进行改进,并对其他五个系统也进行无纹波设计与仿真。
目录
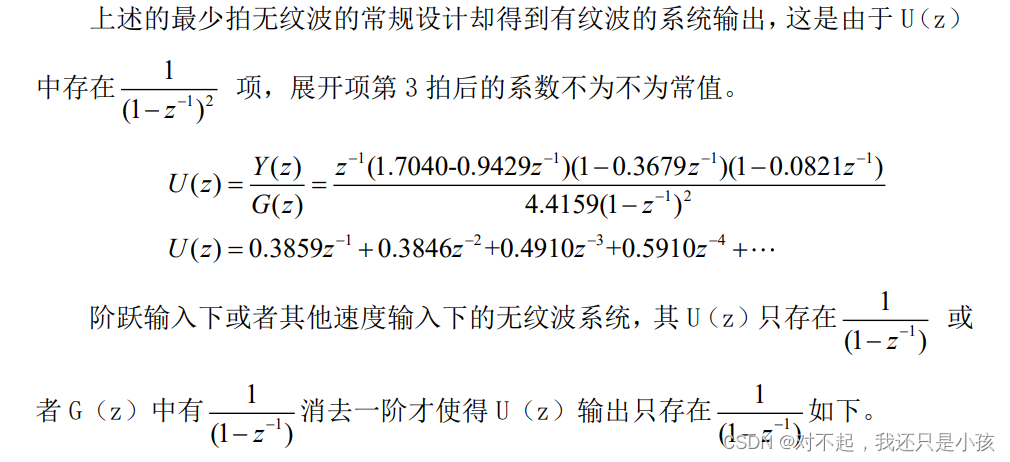
一、分析常规最少拍无纹波系统设计出现的问题
系统设计,上一章选的是第三个。
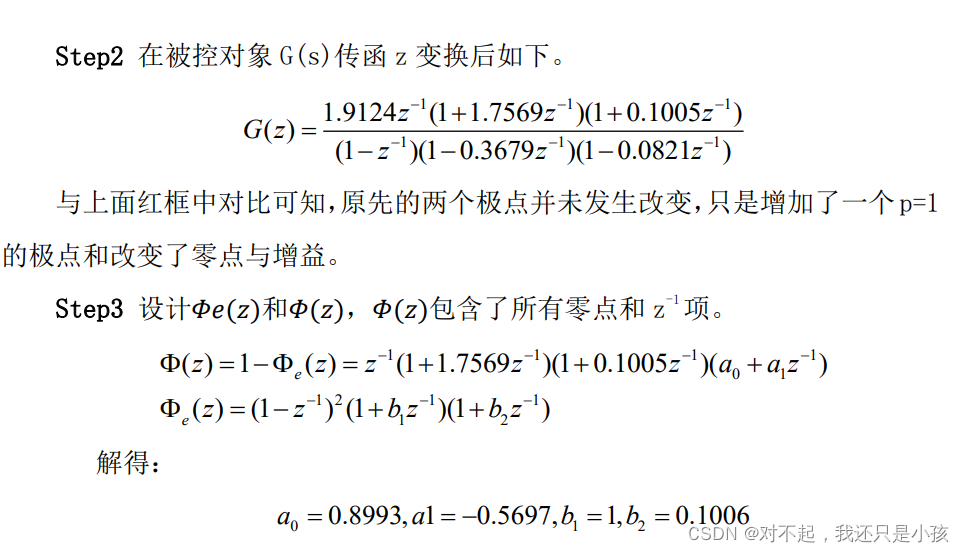
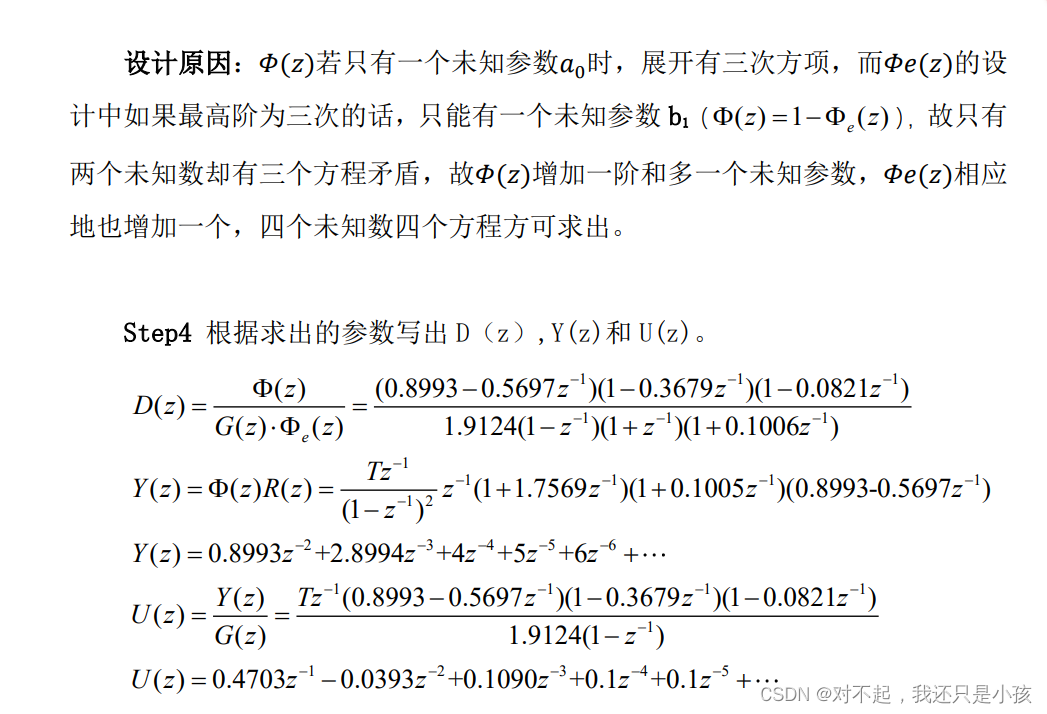
二、原始最少拍无纹波系统设计的改进
由第四部分最少拍无纹波系统的设计方法可知(理论设计原因)
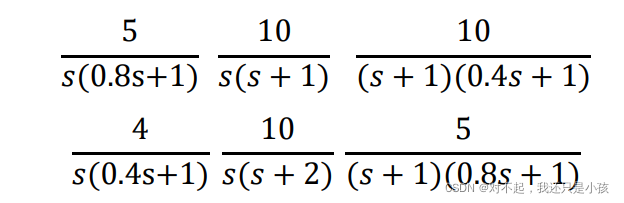
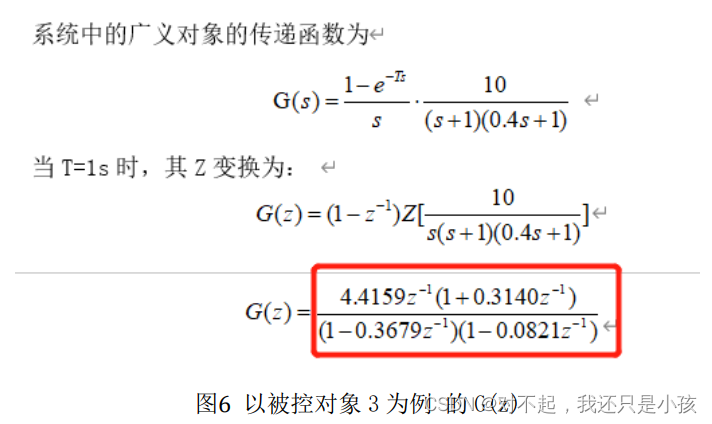
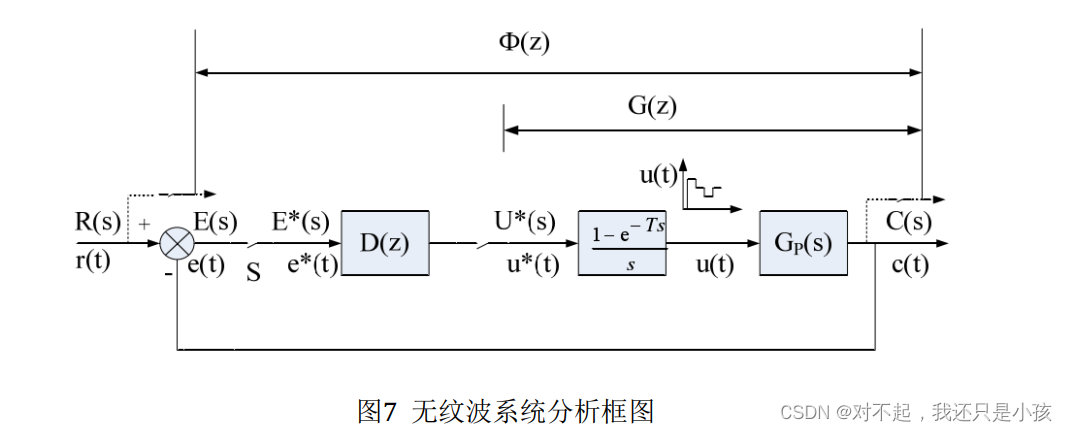
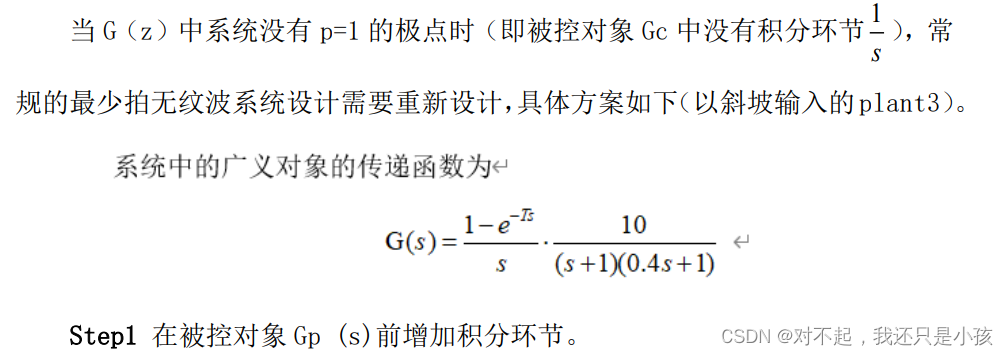
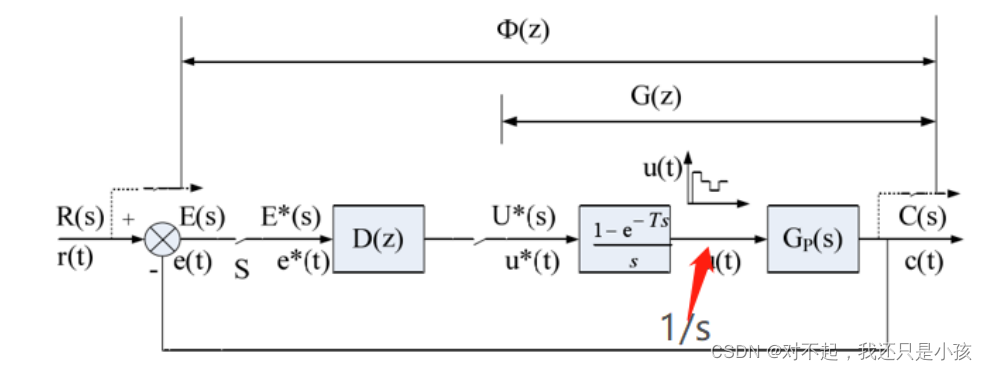
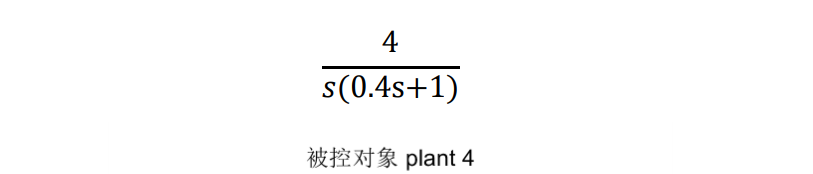
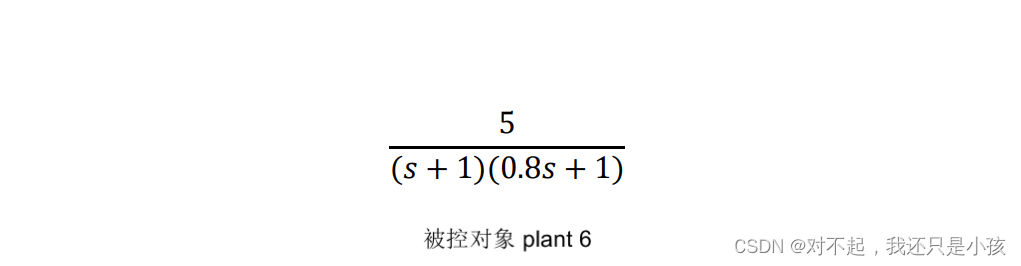
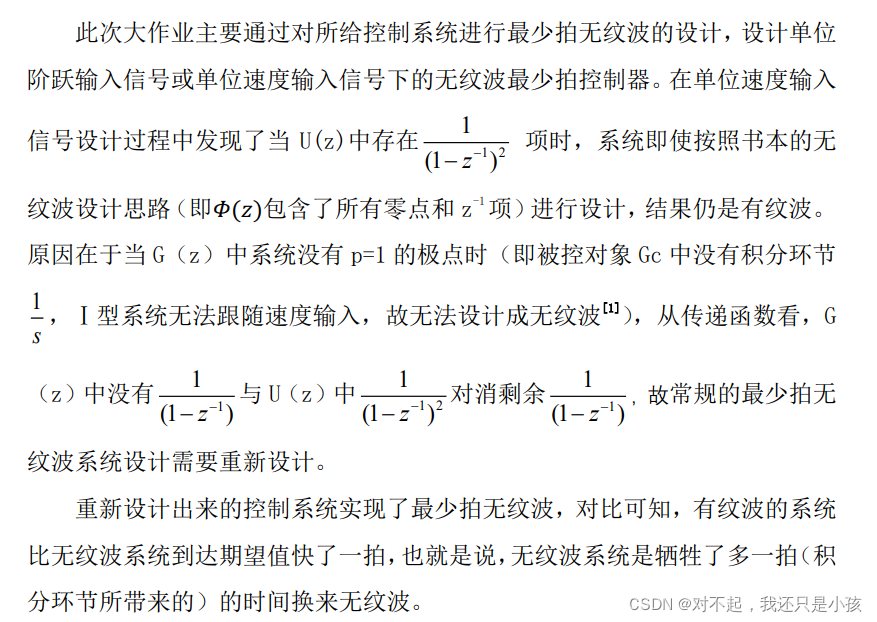
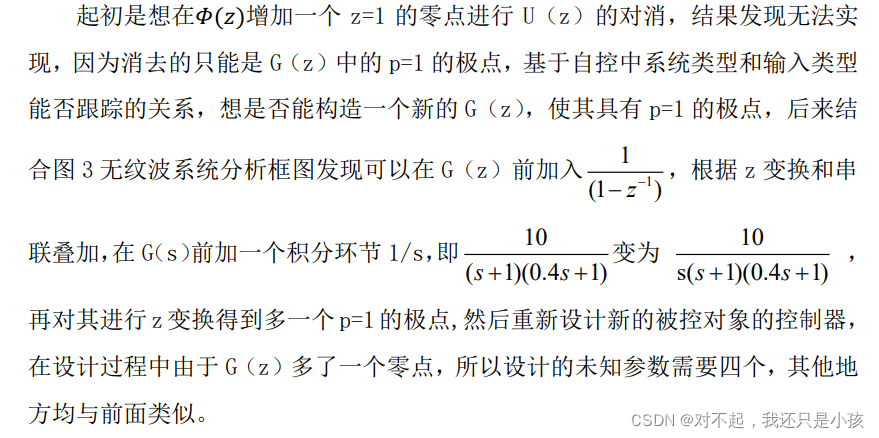
首先从系统的整个过程分析设计无纹波系统的必须满足的前提条件。从图3中可以看出,想在稳态过程中实现无纹波,必要条件为被控对象Gp(s)给出的c(t)必须和输入是同形式的。 以等加速输入函数为例,在静态过程中,要求Gp(s)的输出必须同样是等速函数。由上图可知,零阶保持器的作用是将采样得到的数值在采样周期结束前保持为常数输入给被控对象。因此被控对象的传递函数Gp(s)中必须至少有两个积分环节,才能保证被控对象产生和系统输入同样的等速函数,控制信号虽然是常值,但其稳态输出为等加速变化量。按照以上分析,在等速输入函数的条件下设计无纹波系统,则Gp(s)必须至少有一个积分环节(即至少有1/𝑠 部分)。
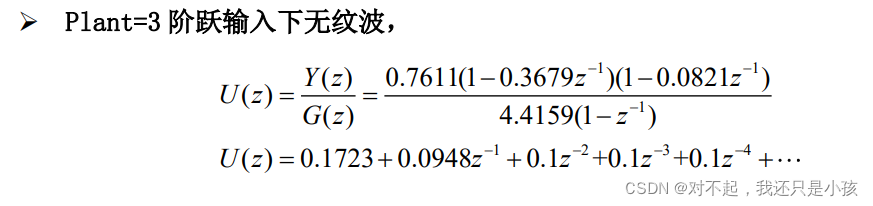
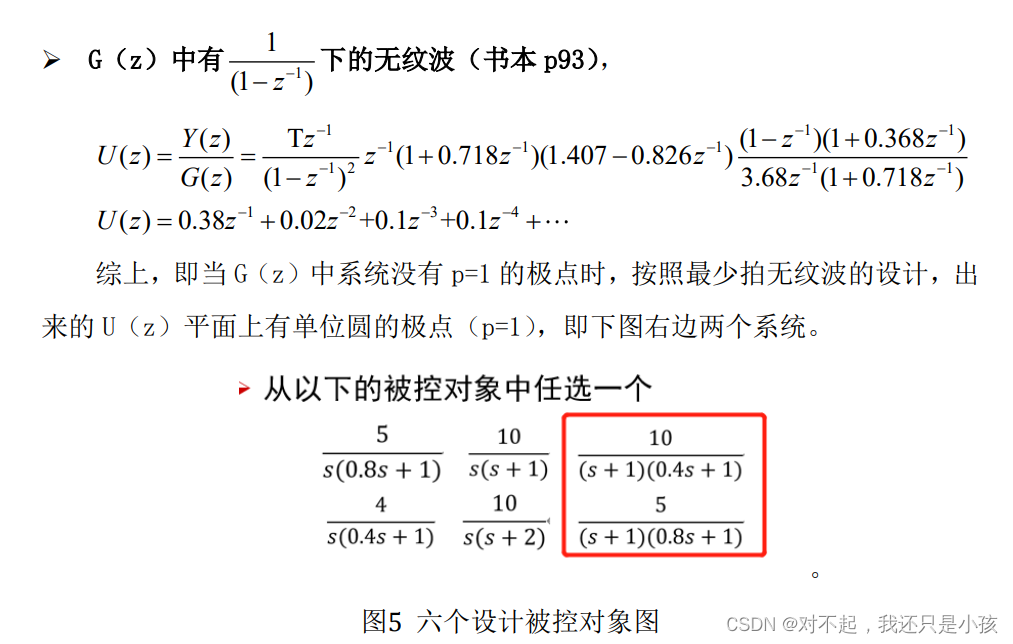
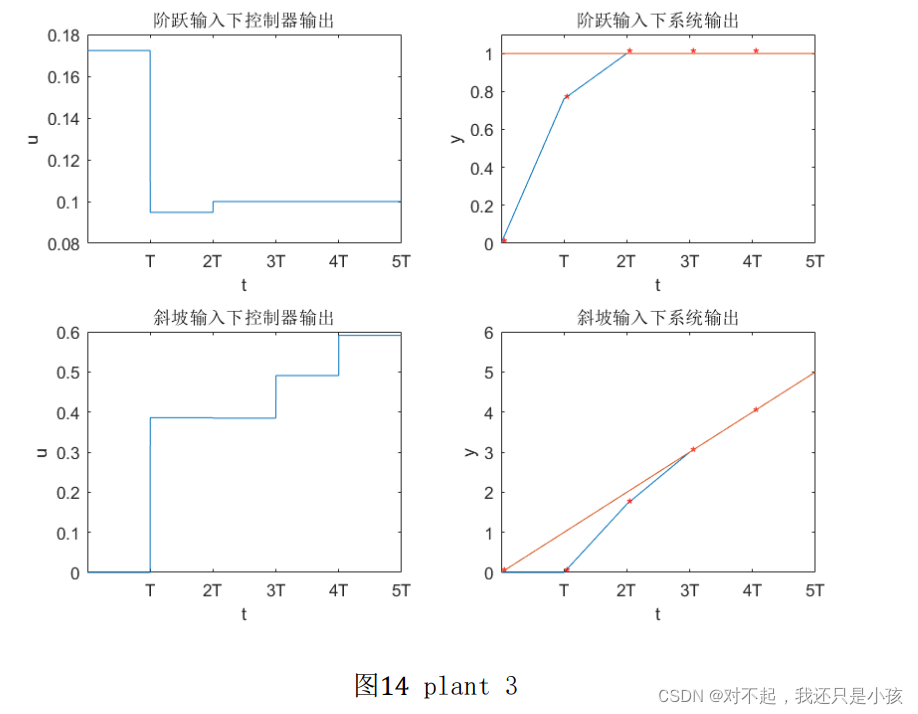
对于plant3无法最少拍无纹波系统的设计的分析
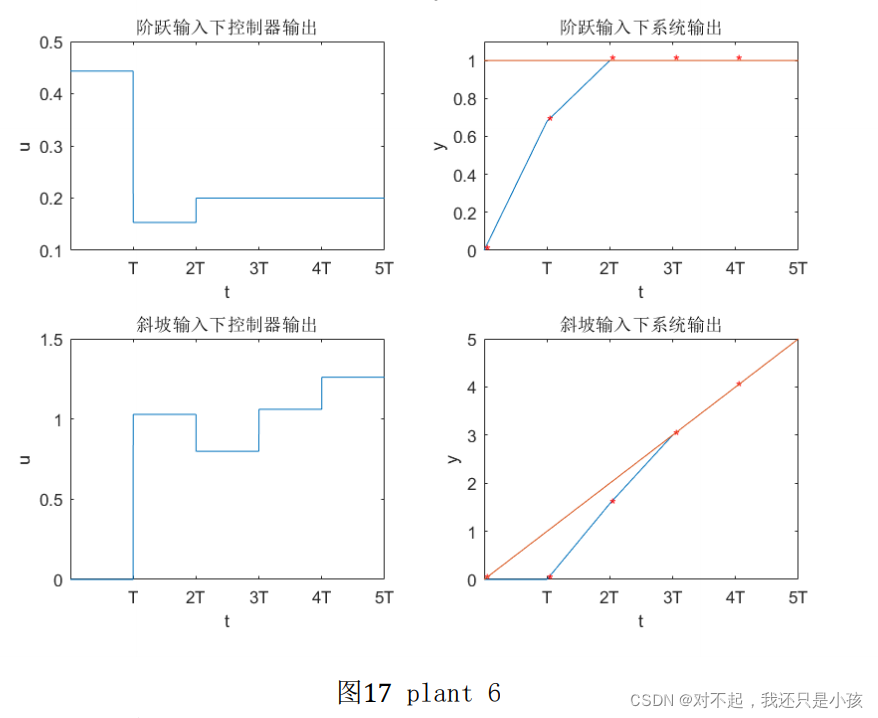
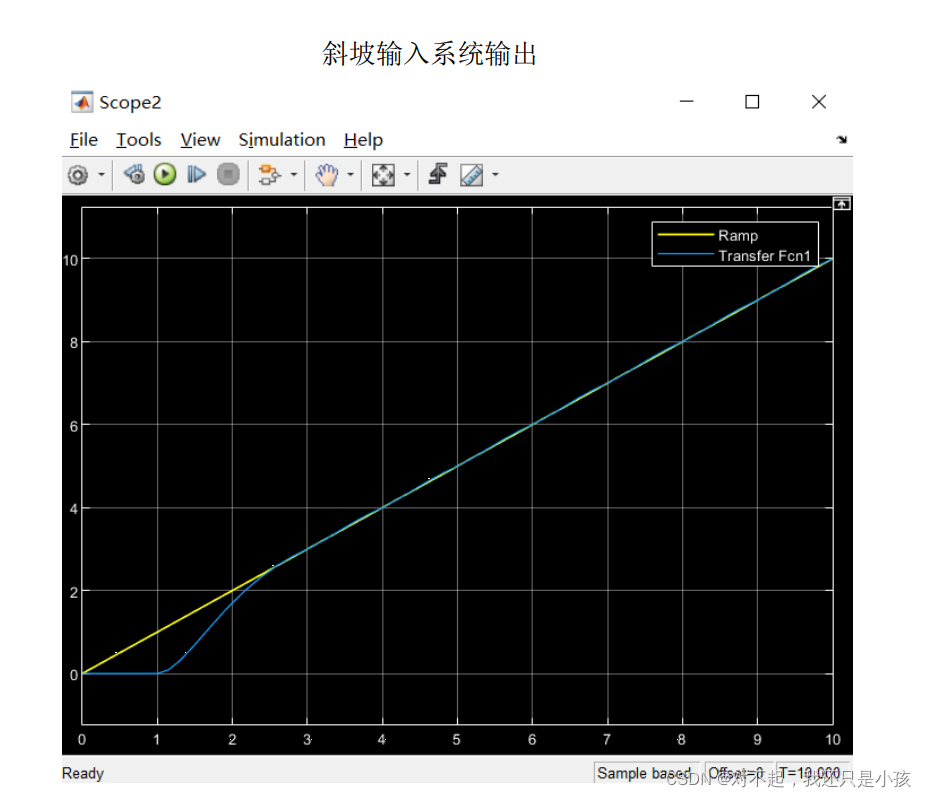
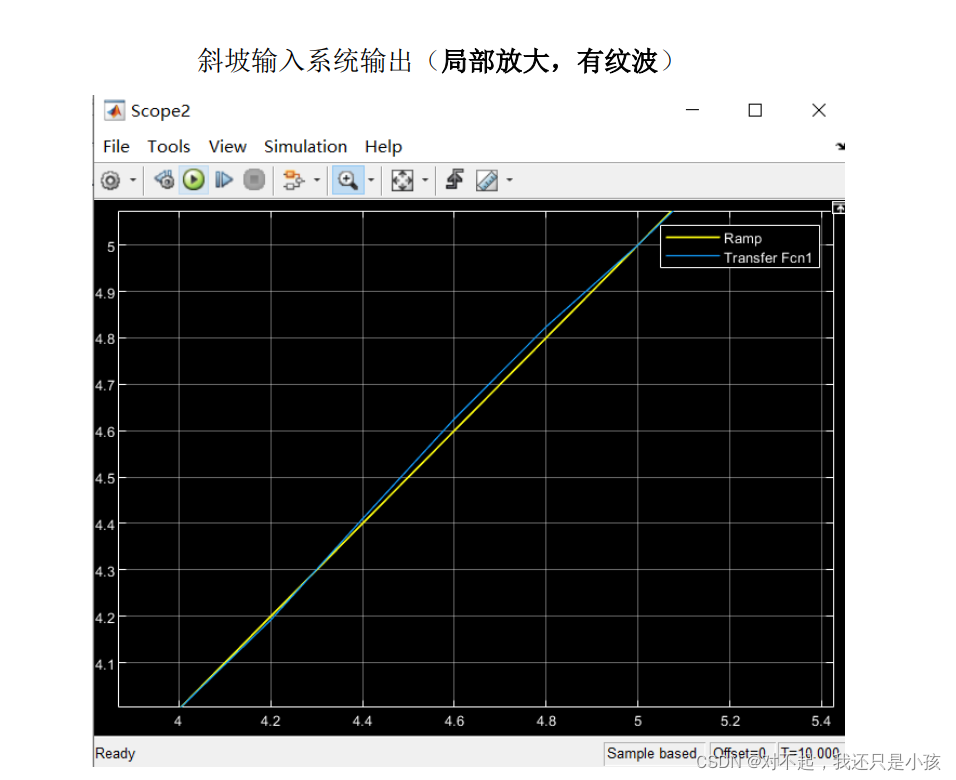
Step5 仿真如图。
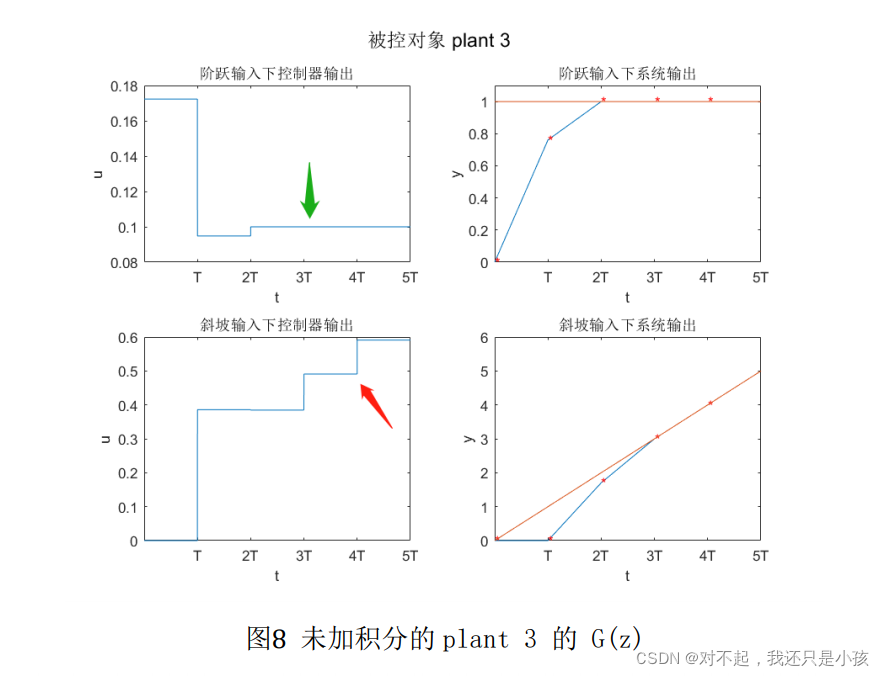
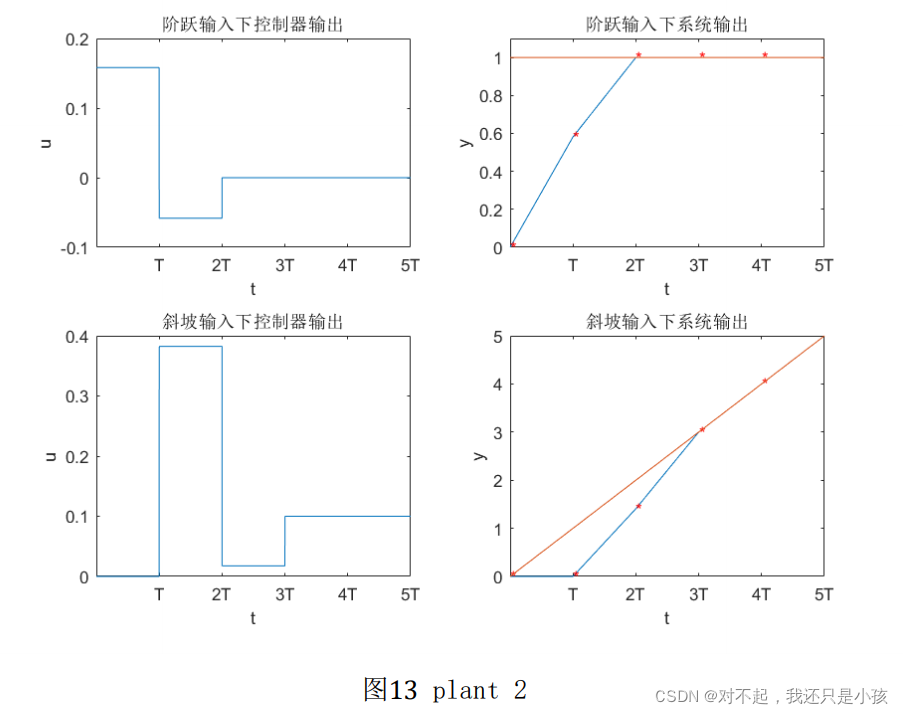
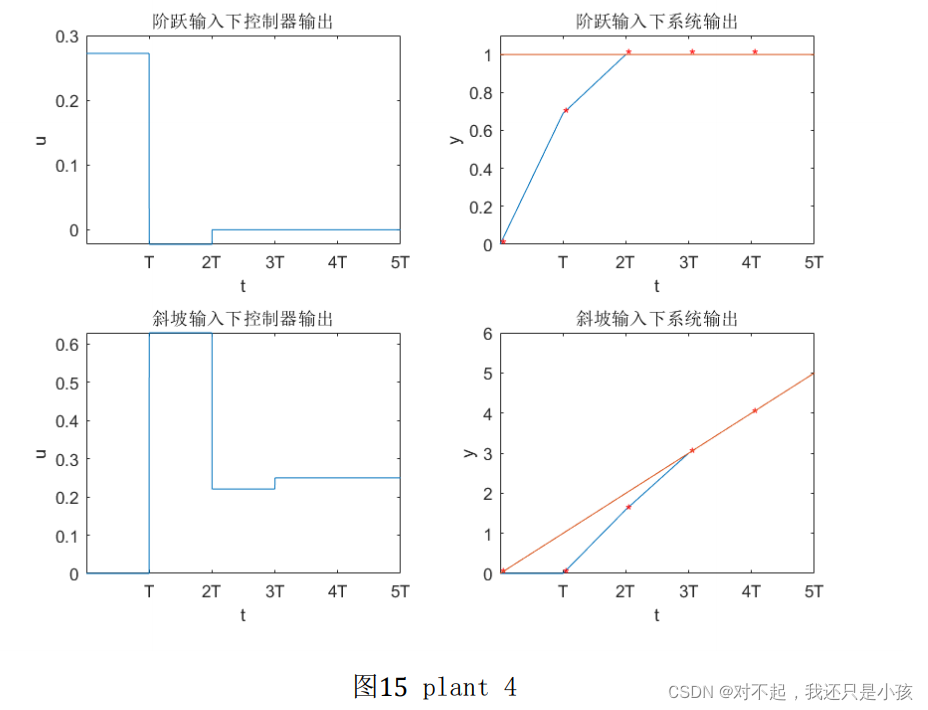
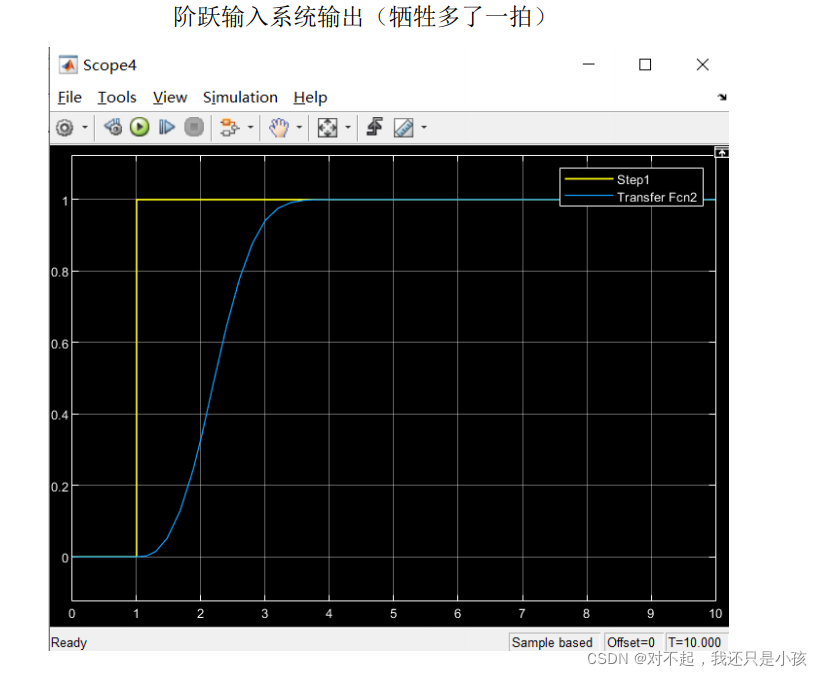
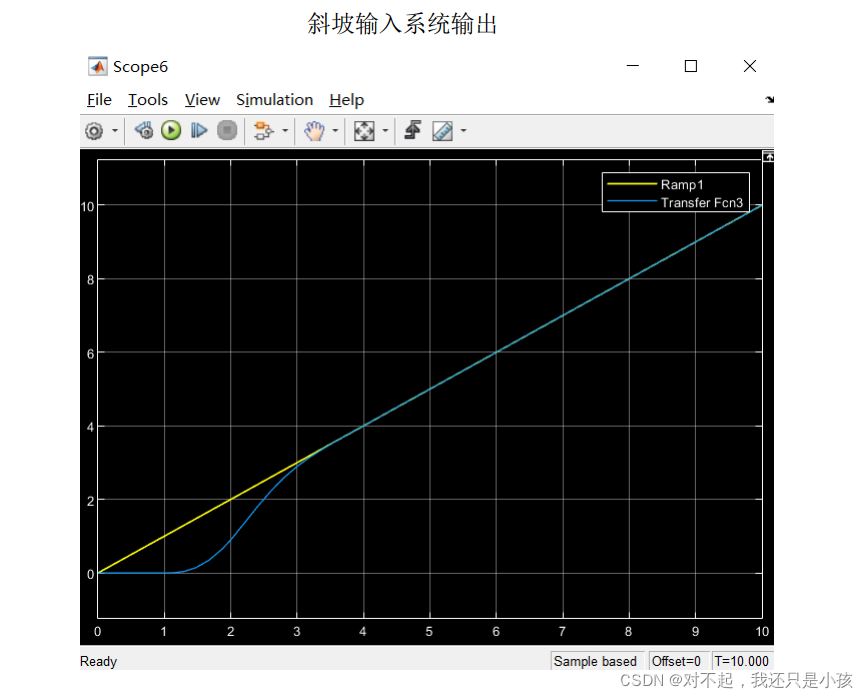
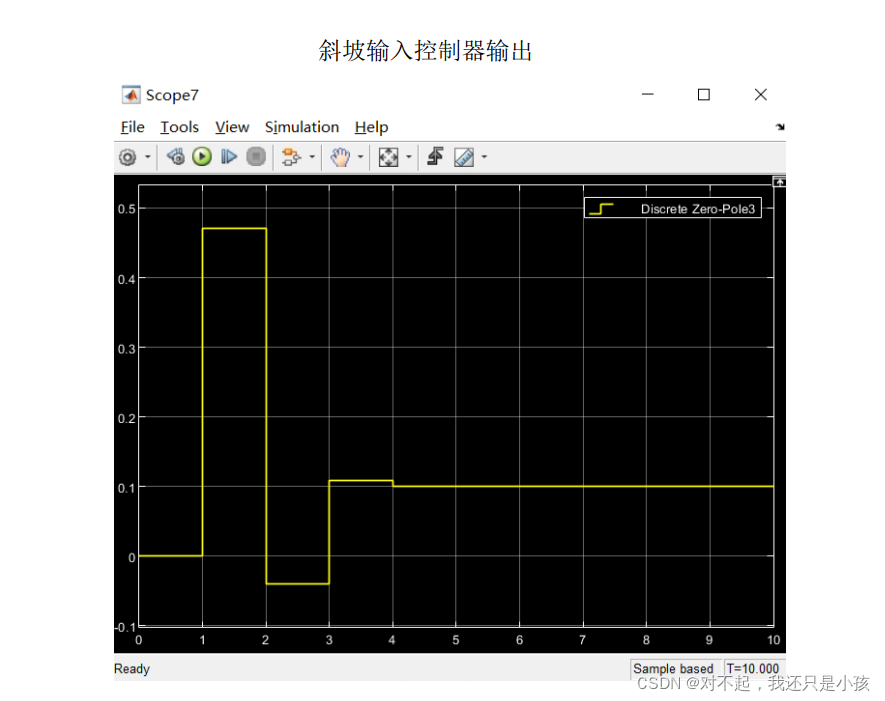
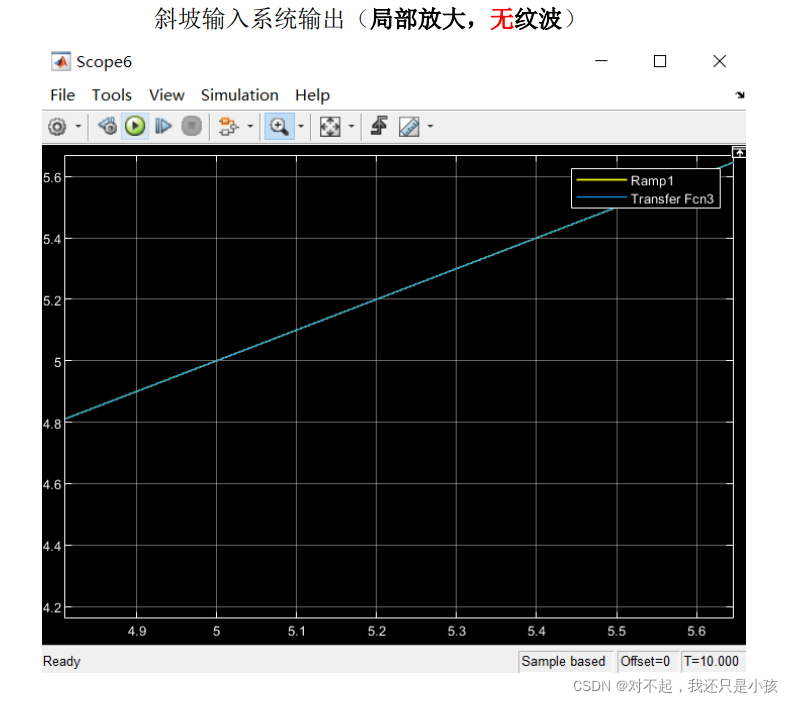
可以看出,有纹波的系统比无纹波系统到达期望值快了一拍,也就是说,无纹波系统是牺牲了一拍的时间换来无纹波。有纹波斜坡输入下在第三拍后就跟踪斜坡输入,但无纹波需要在第四拍才得以准确跟踪(多加一个积分环节的原因)。
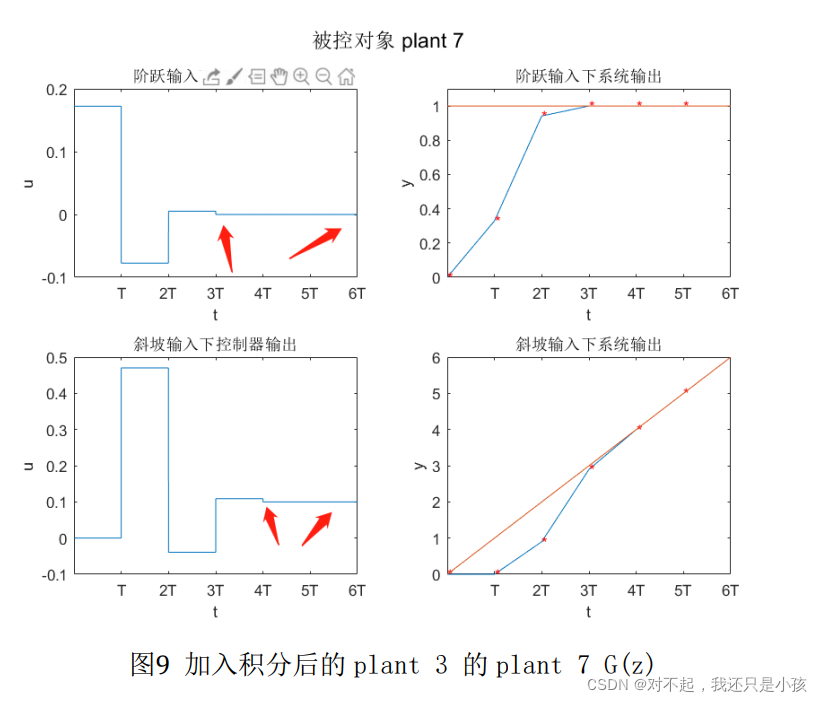
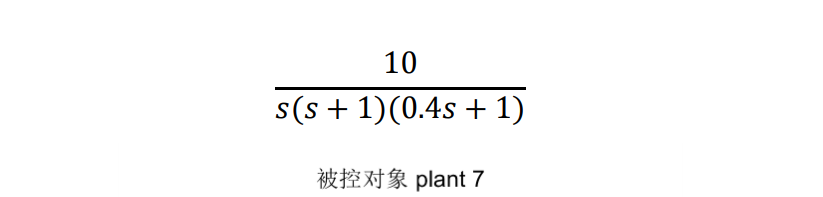
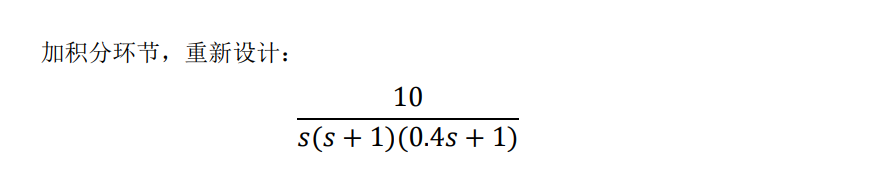
阶跃输入下的plant可不用重新设计(因为阶跃下,Gp可以不含积分环节也可以达到无纹波设计,详细见前面第四部分无纹波系统设计的分析)也可按照原来常规的设计,既加多了一个积分环节,为了方便起见,进行重新设计,其设计思路跟斜坡相似。
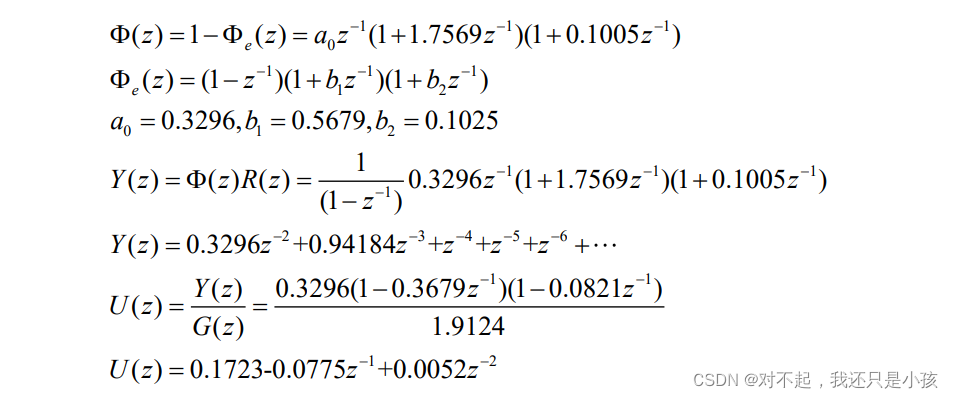
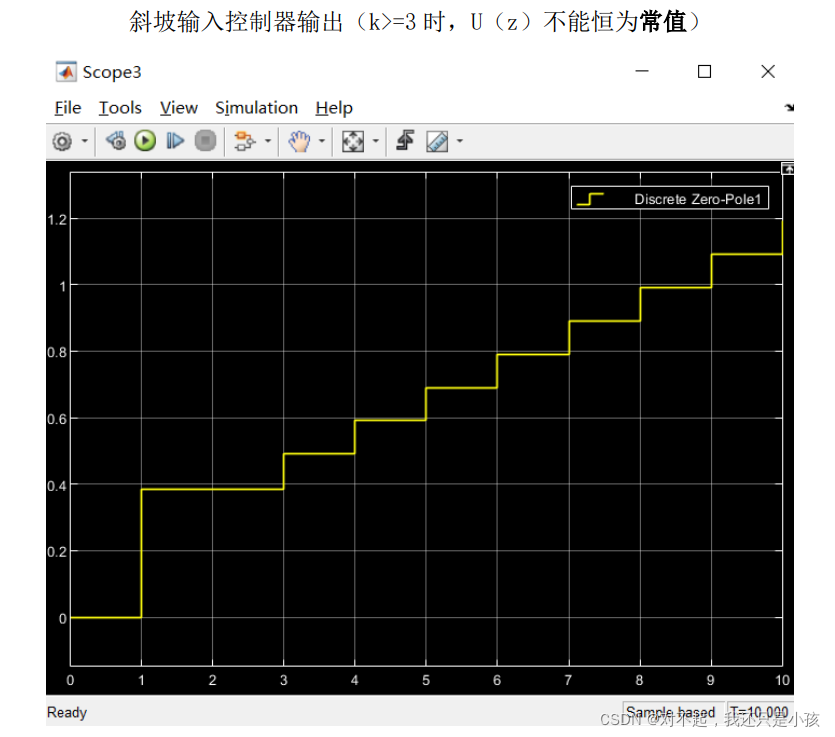
仿真如下:
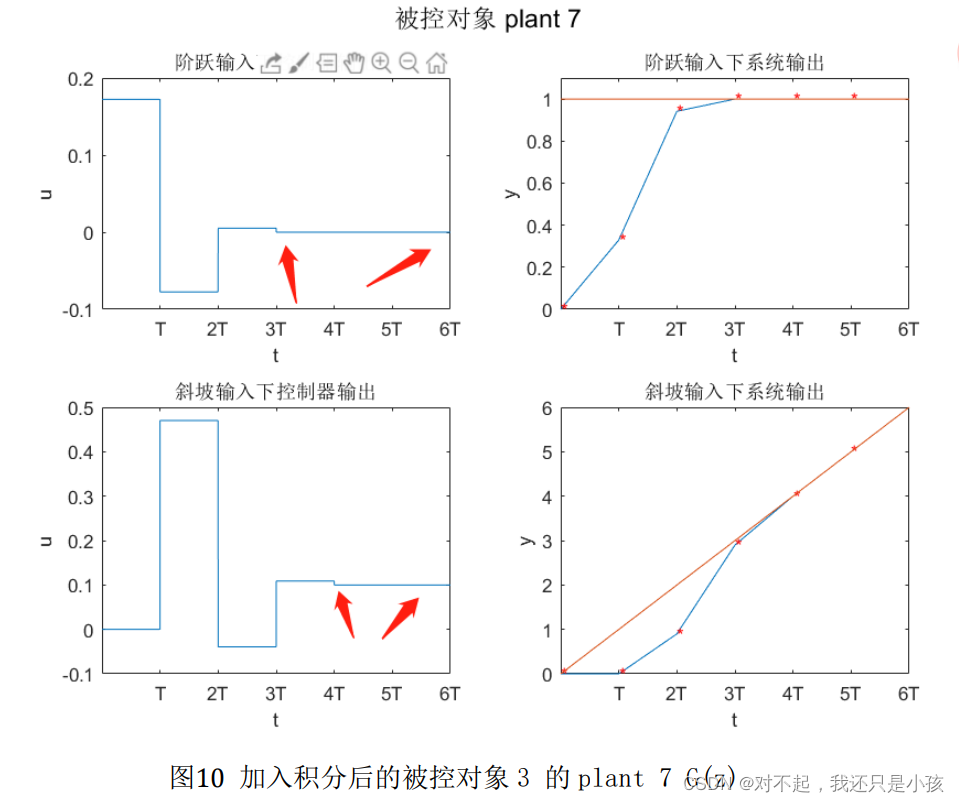
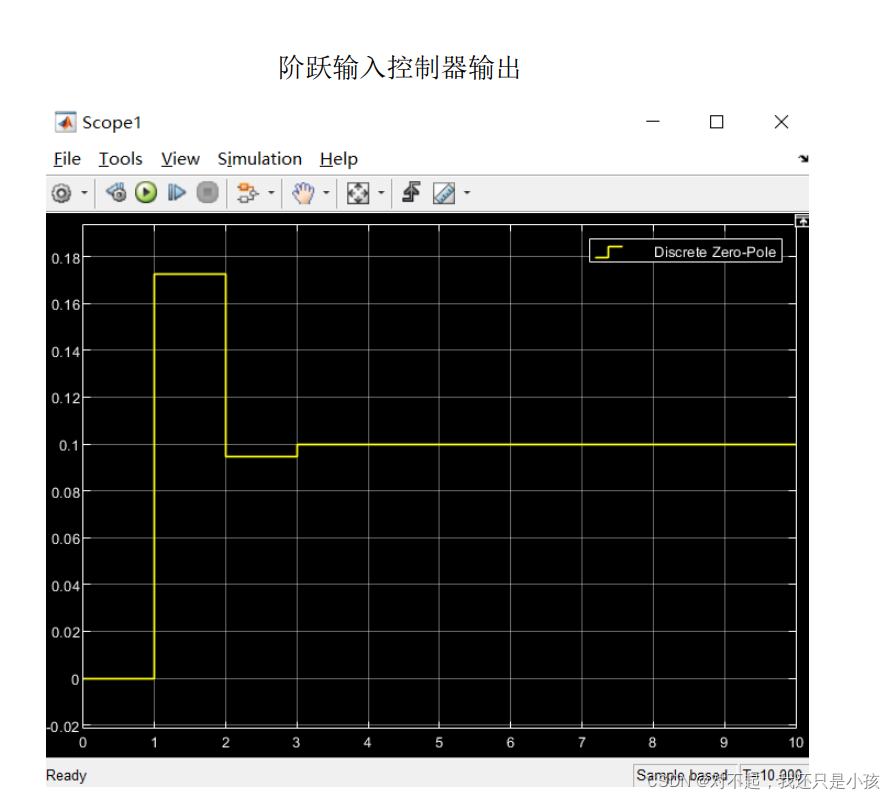
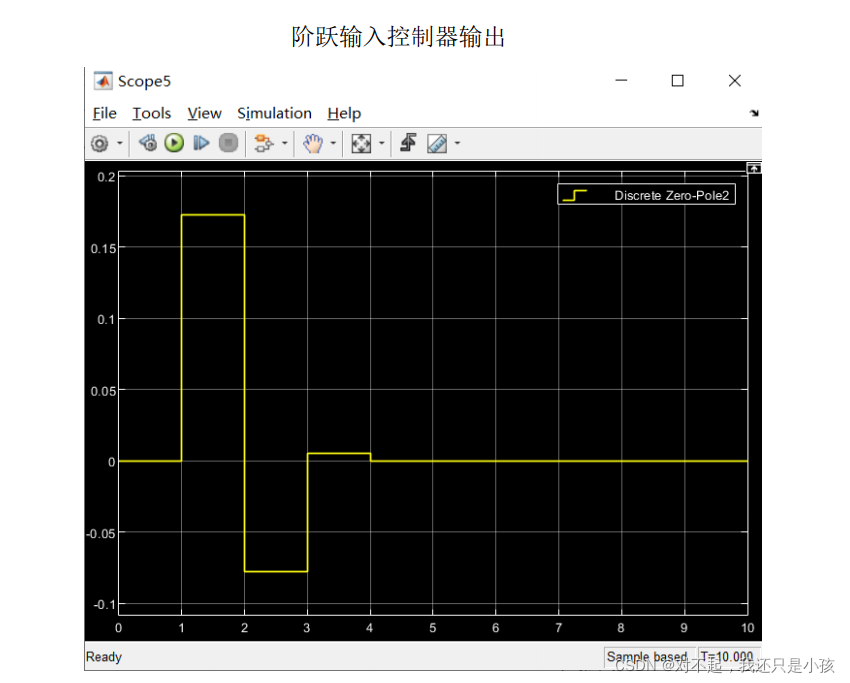
可见,加入积分环节后的控制器输出要到第三拍后才无纹波。
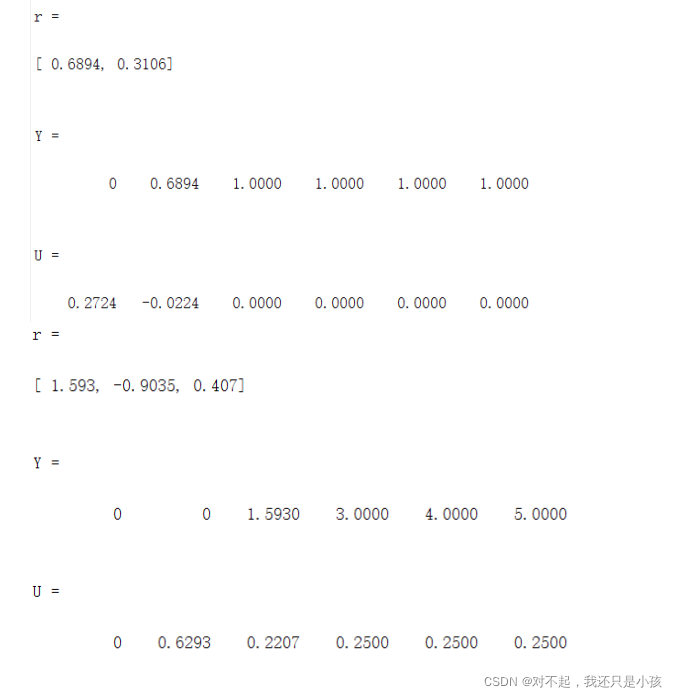
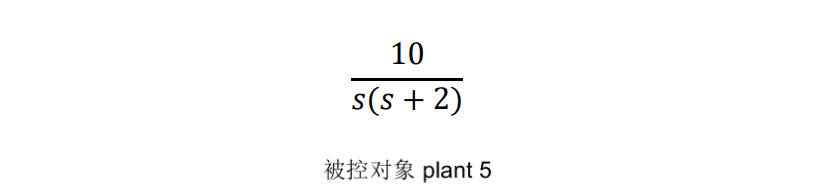
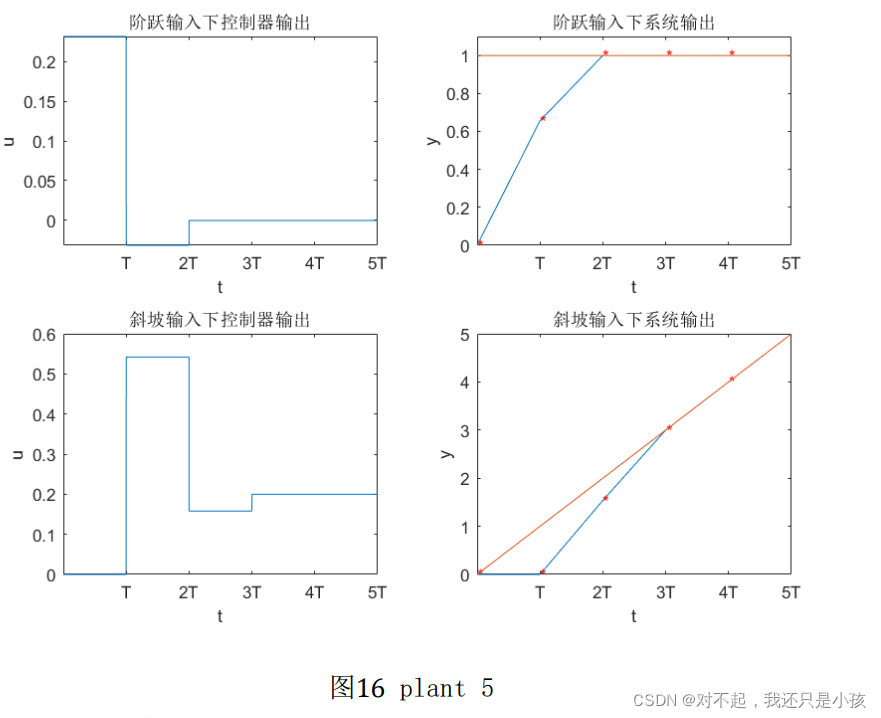
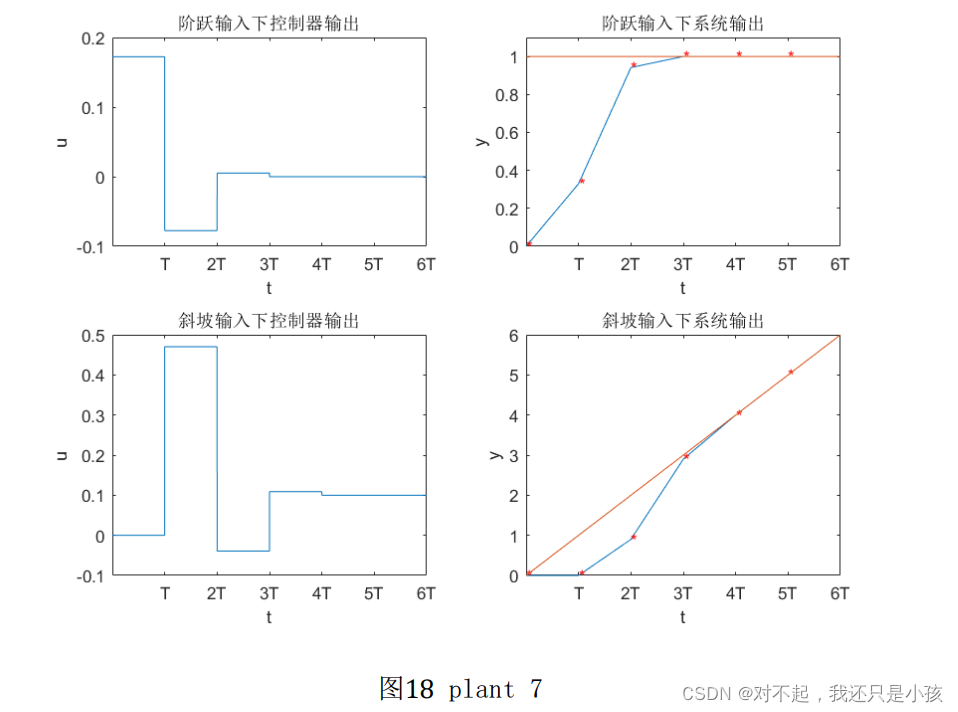
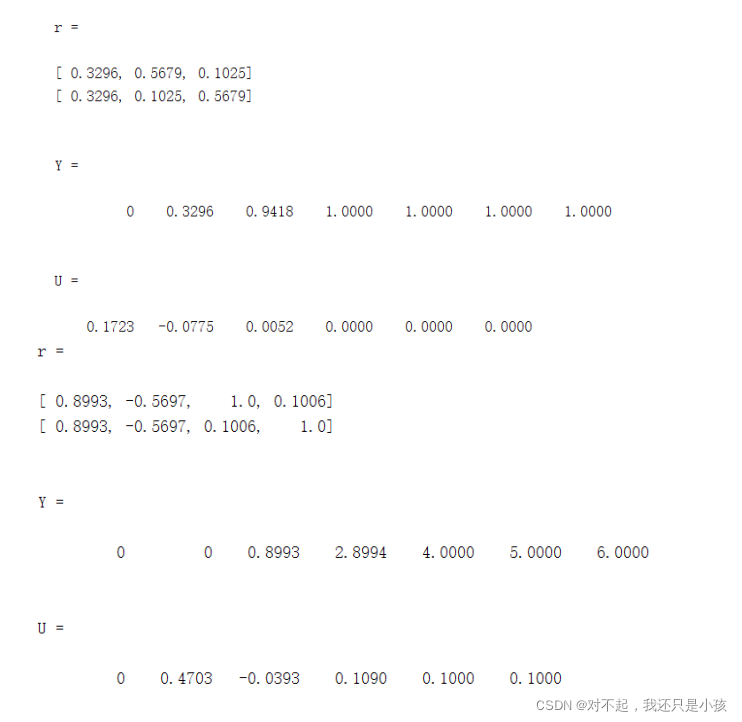
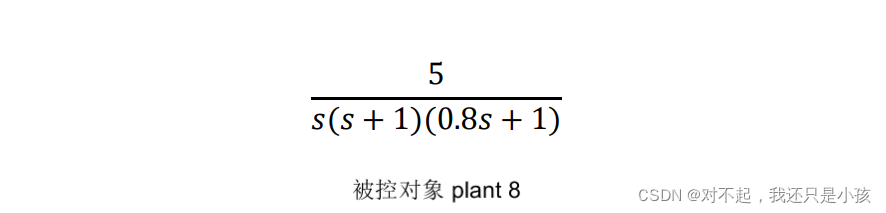
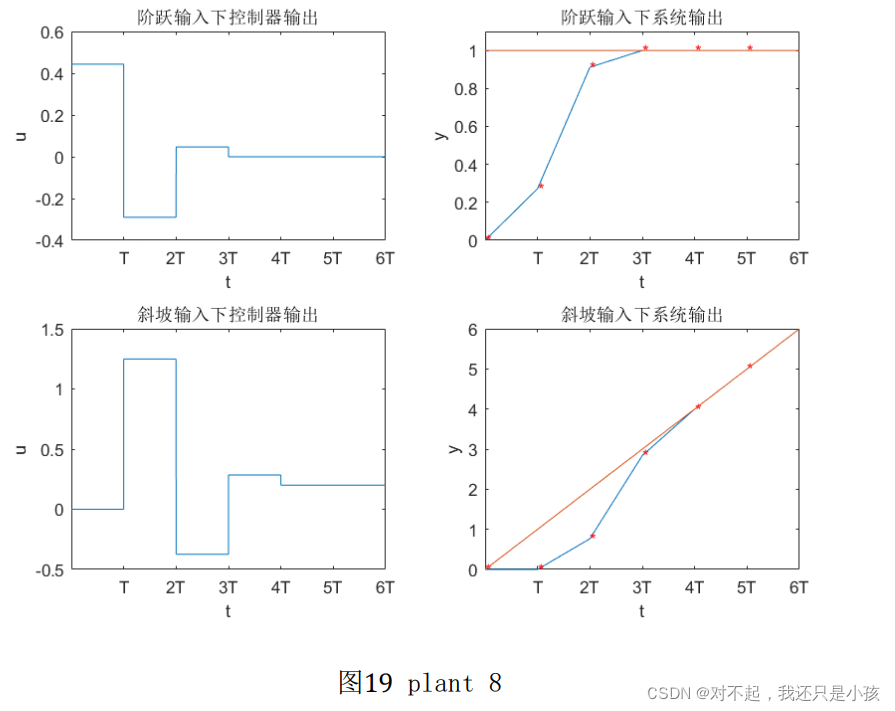
三、最少拍设计全部MATLAB仿真图
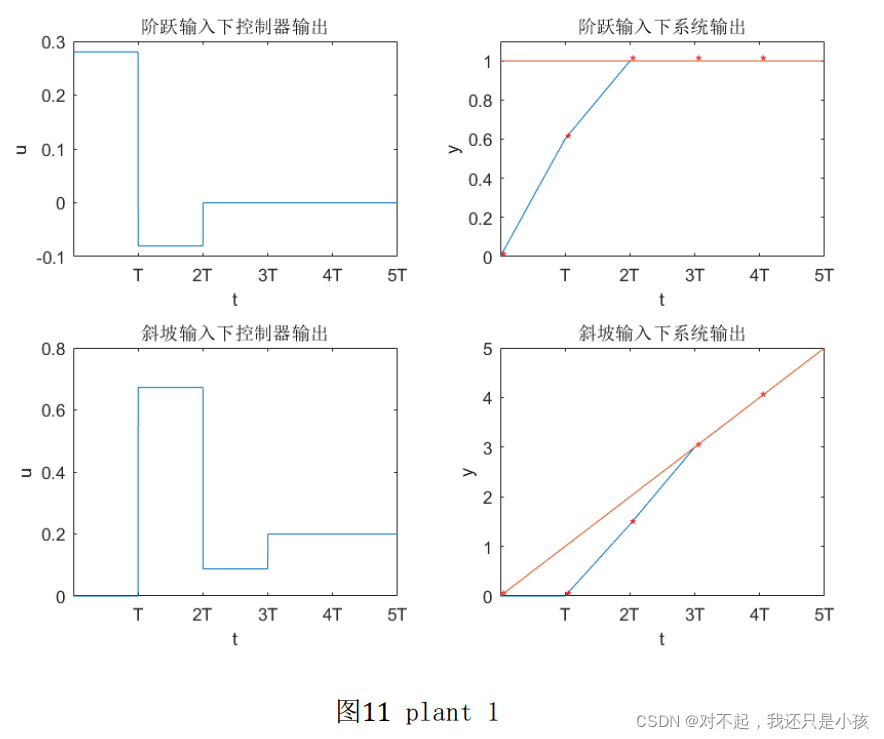
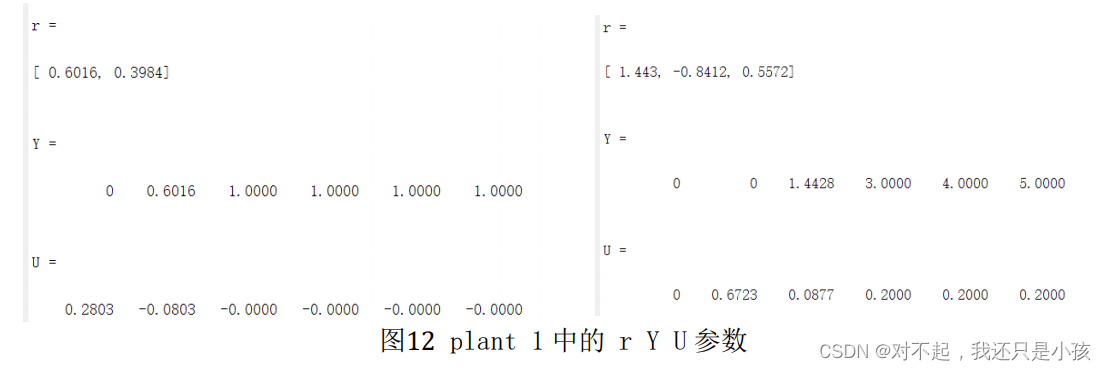
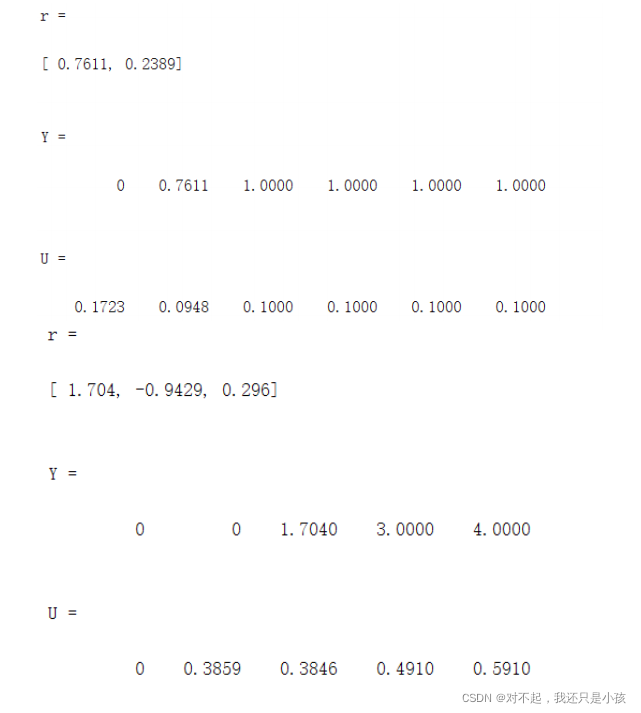
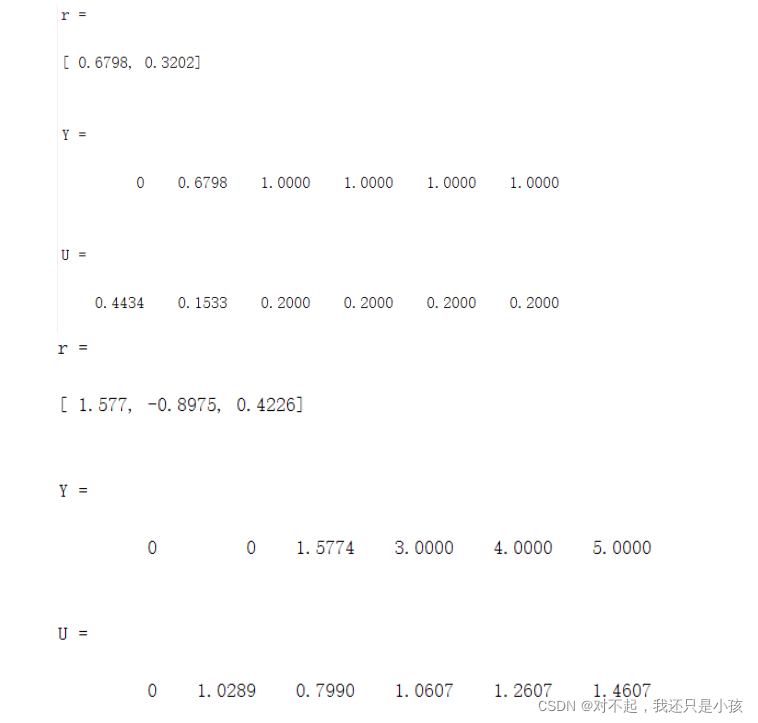
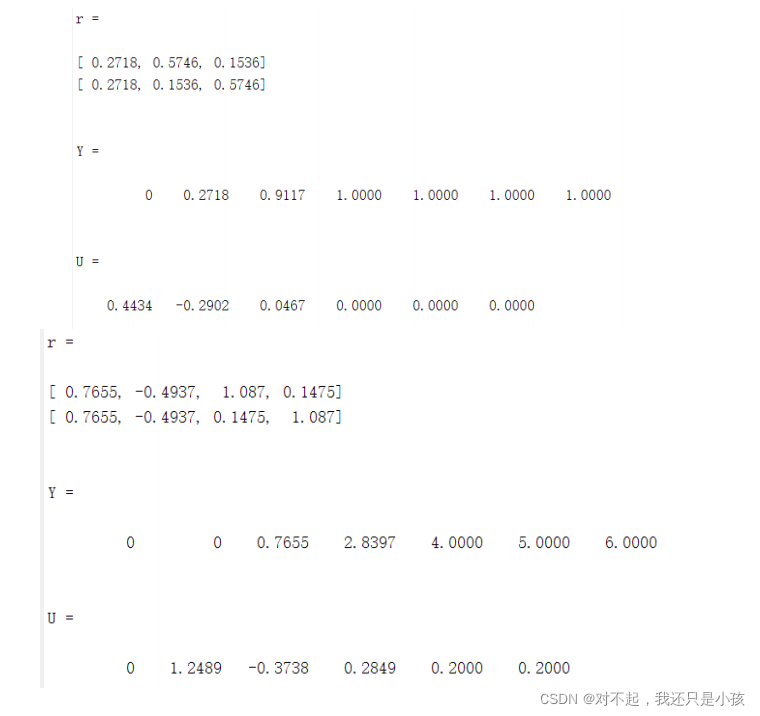
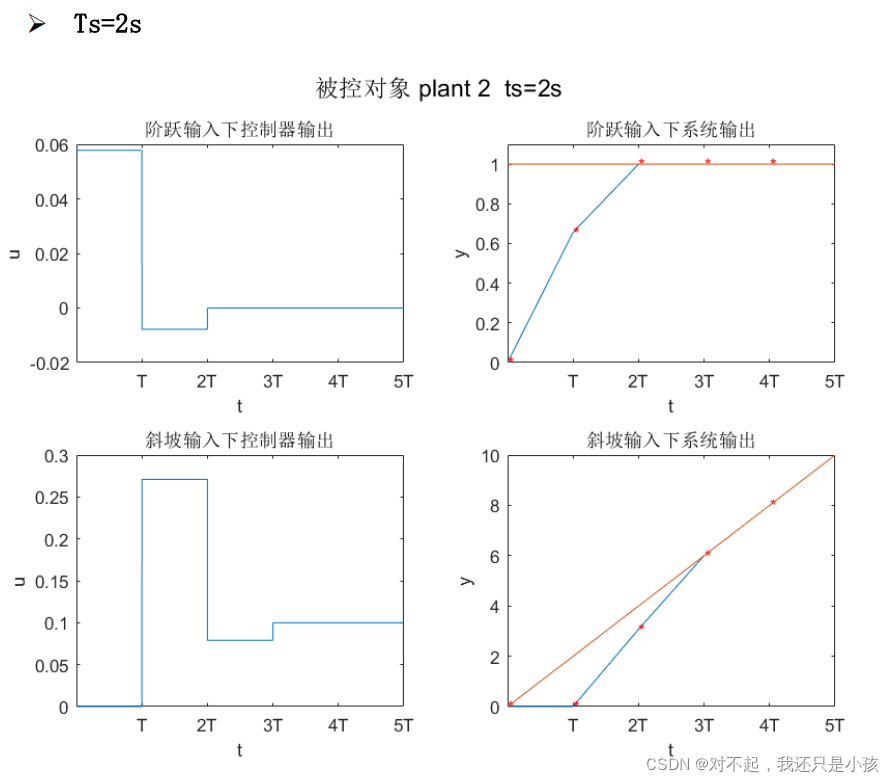
1. 前六个系统为常规设计下的仿真结果,后两个plant7和plant8分别对应plant3和plant6的重新设计。r为求解的未知参数[a b]或[a0 a1 b] 或[a0 b1 b2]或[a0 a1 b1 b2]。也可以改变采样时间Ts,系统也会出现相应的变化,以plant2为例子。

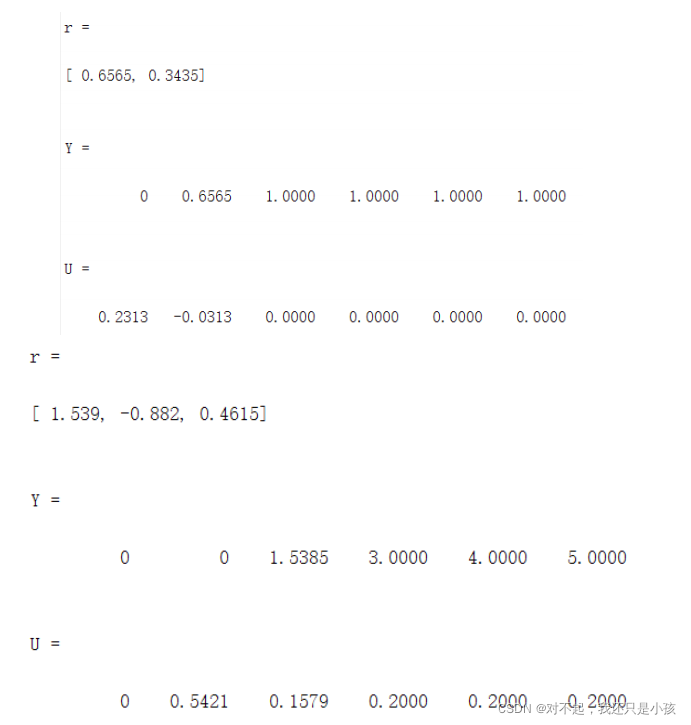
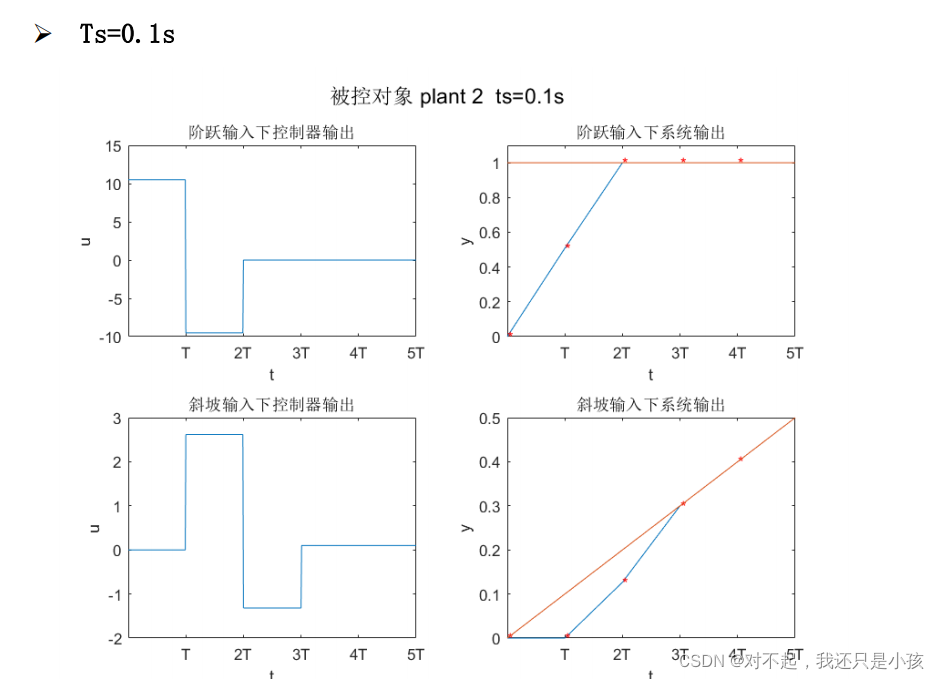
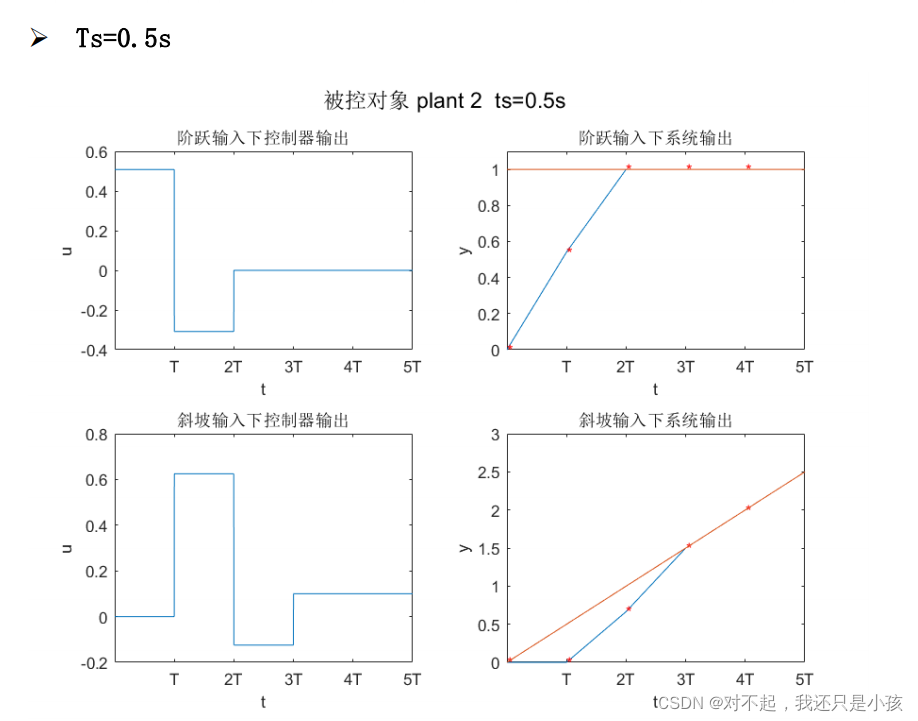
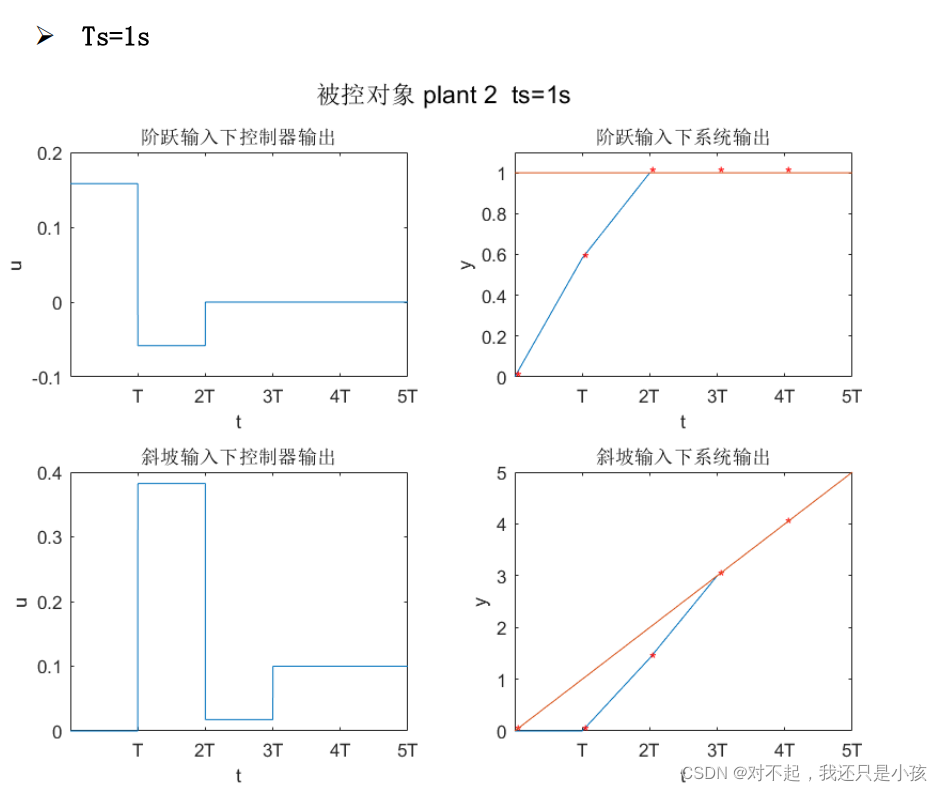
2. 下面为plant 2在不同采样时间Ts下的不同结果图。

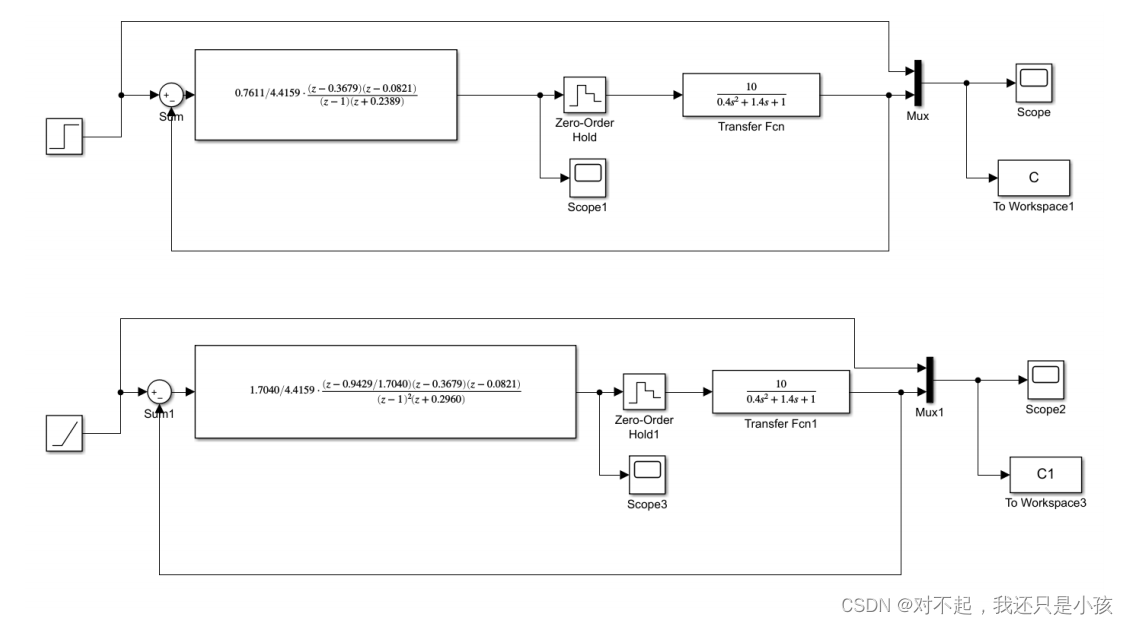
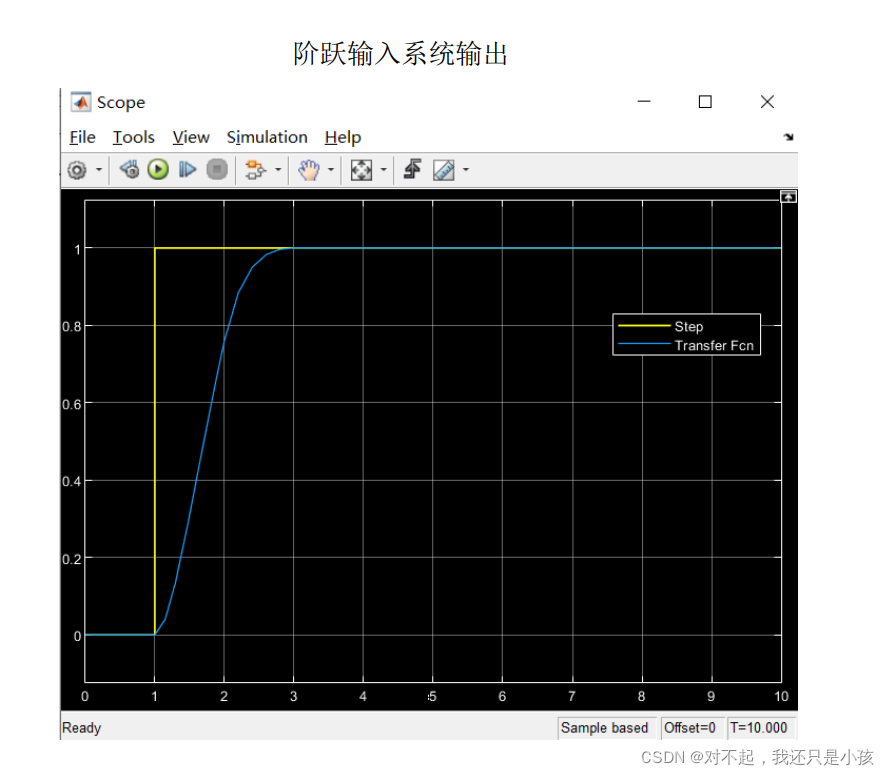
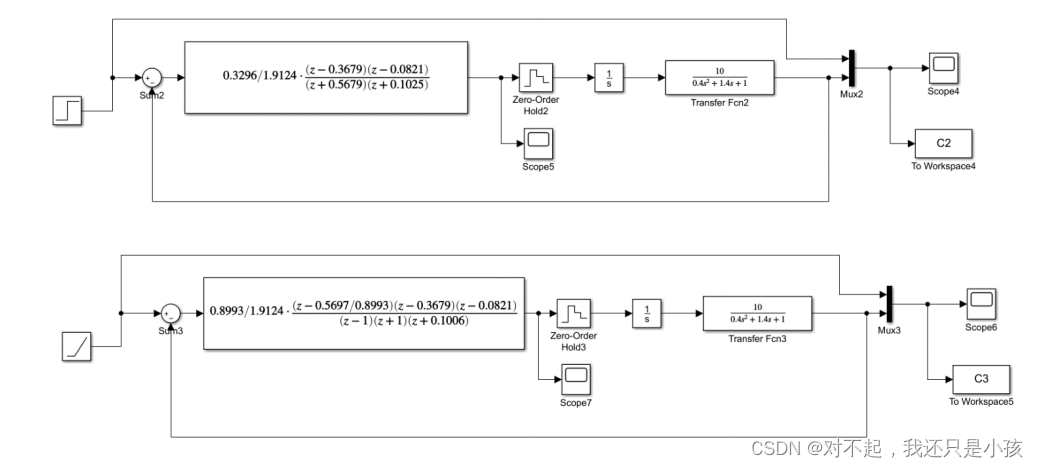
四、最少拍设计Simulink仿真图

总结
心得体会
在实现了全部设计之后,以为仿真都实现了,结果却发现在第三个和第六个设计系统中的斜坡输入下,竟然无法实现无纹波设计。后来查阅了各种资料(知网的研究生论文只有一篇,且并未提及到),发现最多都只是发现了这一个问题(百度文库中东华理工学院[5]有纹波的课程设计和徐州的课程设计论文[4]),并未解决。于是咨询了老师该系统是否无法做无纹波设计,后来在老师的暗示下得知这应该有一种可行性方案进行设计,只是目前网上均并未提及。
最终在plant7和plant8实现了plant3和plant6的重新设计和无纹波仿真,跟踪输入比有纹波牺牲多一拍的时间(积分环节的缘故)。最后为了完善还实现了不同采样时间Ts下的系统设计仿真。另外,所有的代码均在附件Dz.m和Dz.slx,其中所有代码注释均在代码里,为了报告美观就没在本报告对代码进行讲解。
上一章链接:最少拍控制系统设计(一)控制方法基本原理和控制方案的详细计算过程。_对不起,我还只是小孩的博客-CSDN博客
matlab,simulink源文件和原文报告word(仅供学习参考):
链接:https://pan.baidu.com/s/1EJZBDuiRrUlWJhprVvaDlw?pwd=6666
提取码:6666
参考文献
[1] 闫红烨. 基于最少拍控制的逆变器双环控制策略的研究[D].华中科技大学,2011.汤乐. 倒立摆系统建模与控制方法研究[D].河南大学,2013.
[2] 《微型计算机控制技术》黄勤 主编,李楠 副主编,出版社:机械工业出版社
[3] 《微型计算机控制技术第二版》作者:于海生、丁军航、潘松峰等,出版社:清华大学出版社

















 117
117

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









