






 本文详细分析了ICM - 20608芯片的硬件特性、驱动方式、内部结构及寄存器参数意义。介绍了SPI总线的工作原理、特点和操作要点,还提及SPI操作ICM - 20608的注意问题,并给出驱动代码实现的参考文档及相关资源下载地址。
本文详细分析了ICM - 20608芯片的硬件特性、驱动方式、内部结构及寄存器参数意义。介绍了SPI总线的工作原理、特点和操作要点,还提及SPI操作ICM - 20608的注意问题,并给出驱动代码实现的参考文档及相关资源下载地址。
目录
源代码下载地址:ICM20608linux环境下的测试程序资源-CSDN文库
ICM20608linux环境下的驱动程序资源-CSDN文库
说明文档地址: 实现linux platform tree框架下ICM20608驱动开发(SPI)-CSDN博客
概述
本文详细分析了ICM-20608芯片的硬件特性,驱动方式、内部框图结构,以及寄存器的参数意义。还介绍SPI接口的工作原理,操作要点等知识点。
1 认识ICM20608
1.1 ICM20608简介
ICM20608是一款由英飞凌(InvenSense)公司生产的6轴惯性测量单元(IMU)芯片。该芯片结合了三轴陀螺仪和三轴加速度计,可以同时提供精确的角度和加速度测量。ICM20608采用了数字接口,可以与微控制器或其他设备进行通信,并通过SPI或I2C协议进行数据传输。此外,ICM20608还具有低功耗和高精度的特点,适用于移动设备、智能穿戴设备、无人机和机器人等应用领域。
1.2 硬件接口
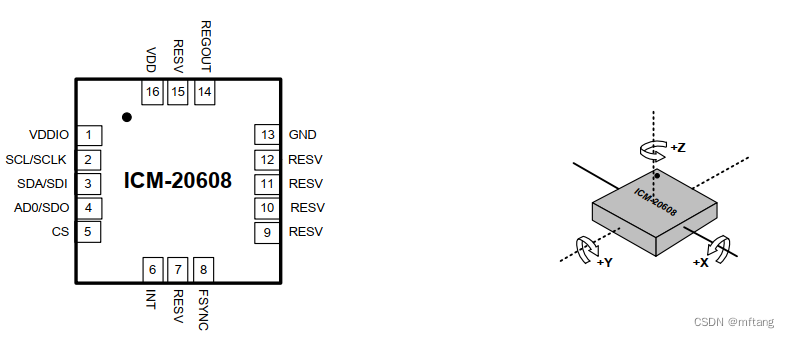
ICM20608的封装引脚总共有16个,其具体定义如下:
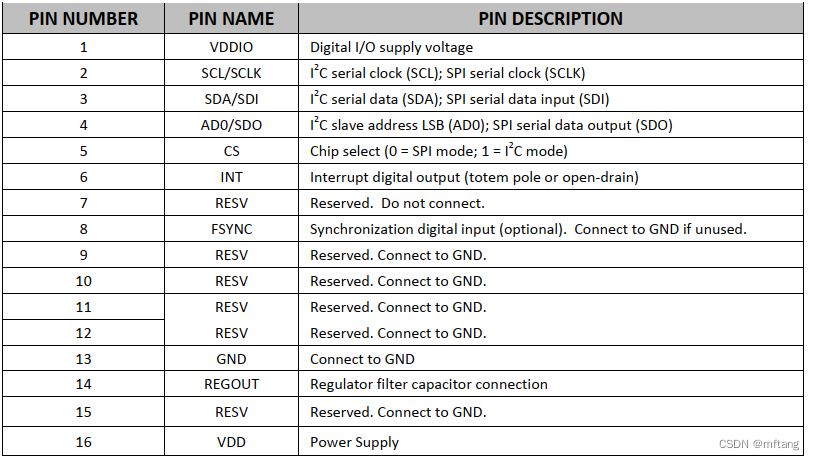
ICM20608的封装图
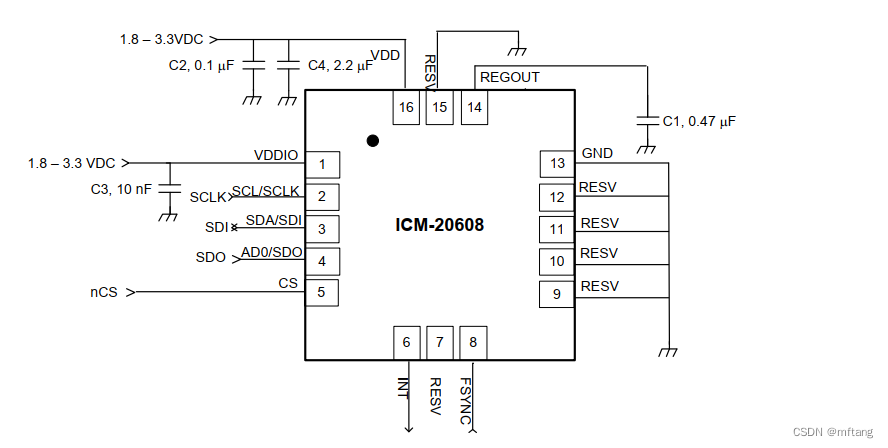
1.3 ICM20608的经典应用电路
1.3.1 SPI模式下的应用电路
在该模式下,其与MCU之间有四个引脚: CS , SCLK, MOSI, MISO
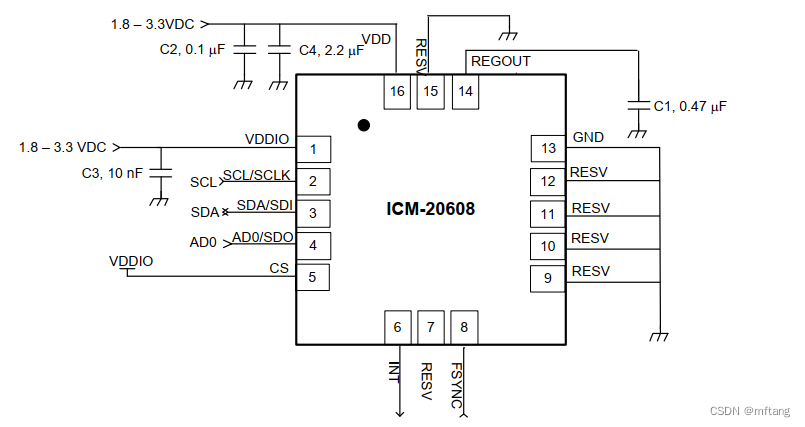
1.3.2 I2C模式下的应用电路
在该模式下,其与MCU之间有2个引脚: SCL和SDA, AD0为选址引脚,如果无需软件控制,可通过硬件电路对其置位。
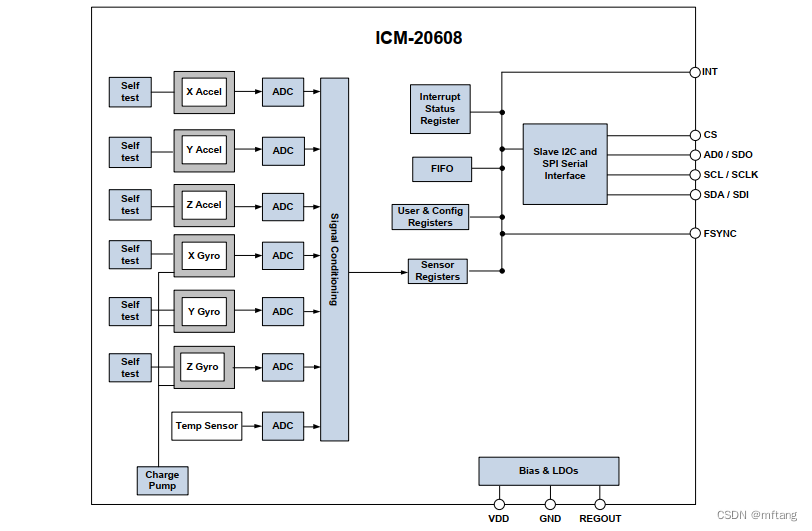
1.4 ICM20608内部结构
ICM20608是一种6轴惯性传感器,可以测量三轴加速度和三轴角速度。它由内部的集成电路和外部的传感器组成。
ICM20608的内部结构主要包括以下几个部分:
-
加速度计部分:内部集成了三轴加速度计,可以测量物体在三个方向上的加速度变化。加速度计通过测量物体的运动状态来计算物体所受的加速度。
-
陀螺仪部分:内部集成了三轴陀螺仪,可以测量物体绕三个轴线旋转的角速度变化。陀螺仪通过测量物体的角速度来计算物体的旋转状态。
-
数字信号处理部分:ICM20608内部还包括了一些数字信号处理电路,用于对传感器测量出的原始数据进行处理和转换。这些数字信号处理电路可以提供更精确的测量结果。
-
通信接口:ICM20608还具有通信接口,可以与外部设备(如微控制器或计算机)进行通信。通信接口通常是I2C或SPI接口。
1.5 ICM20608重要寄存器
ICM20608是一款六轴陀螺仪和加速度计传感器。它具有许多寄存器,用于配置和读取传感器的各种参数和数据。以下是ICM20608的一些重要寄存器:
-
WHO_AM_I (寄存器地址:0x75):用于读取器件ID。ICM20608的WHO_AM_I寄存器的默认值为0xAF。
-
PWR_MGMT_1 (寄存器地址:0x6B):用于管理电源和休眠模式。可以设置传感器的时钟源和休眠模式。
-
ACCEL_CONFIG (寄存器地址:0x1C):用于配置加速度计的量程和滤波器。可以设置加速度计的输出范围和低通滤波器的截止频率。
-
GYRO_CONFIG (寄存器地址:0x1B):用于配置陀螺仪的量程和滤波器。可以设置陀螺仪的输出范围和低通滤波器的截止频率。
-
ACCEL_XOUT_H/L、ACCEL_YOUT_H/L、ACCEL_ZOUT_H/L (寄存器地址:0x3B-0x40):用于读取加速度计的原始数据。分别对应X轴、Y轴和Z轴的加速度值。
-
GYRO_XOUT_H/L、GYRO_YOUT_H/L、GYRO_ZOUT_H/L (寄存器地址:0x43-0x48):用于读取陀螺仪的原始数据。分别对应X轴、Y轴和Z轴的角速度值。
这些寄存器允许开发者配置和读取ICM20608传感器的各种参数和数据,以满足特定应用的需求。
如果要了解其他寄存器,可参看文档: 【免费】ICM20608数据手册资源-CSDN文库
2 SPI总线介绍
2.1 SPI总线概述
SPI(Serial Peripheral Interface)是一种同步串行通信总线。它是一种以主从方式工作的通信协议,用于在微控制器、存储器、传感器等设备之间传输数据。
SPI总线由四根线组成:
-
SCLK(Serial Clock):时钟线,由主设备(主控器)生成,用于同步数据传输。
-
MOSI(Master Out Slave In):主设备输出、从设备输入线,主设备通过该线将数据发送给从设备。
-
MISO(Master In Slave Out):主设备输入、从设备输出线,从设备通过该线将数据发送给主设备。
-
SS(Slave Select):从设备选择线,由主设备控制,用于选择与主设备通信的特定从设备。
2.2 SPI总线的工作原理
SPI总线的工作原理如下:
-
主设备通过SCLK线产生一个时钟信号,并同时通过SS线选择要与之通信的从设备。
-
主设备通过MOSI线将数据发送给从设备,从设备通过MISO线将数据发送给主设备。
-
主设备和从设备在时钟信号的边沿上采样数据。
-
通过多次时钟信号的传输,主设备和从设备可以进行全双工的数据通信。
2.3 SPI总线特点
SPI总线具有以下特点:
-
通信速度快:SPI总线的数据传输速度可以达到几十MHz甚至更高,适合对速度要求较高的应用。
-
简单灵活:SPI总线的硬件实现相对简单,只需几根线即可完成通信,适用于资源有限的系统。
-
占用IO口多:每个从设备都需要一个独立的SS线,因此在连接多个从设备时需要占用多个IO口。
-
通信距离有限:SPI总线通常用于在短距离内通信,通信距离一般在几米以内。
SPI总线在很多嵌入式系统中广泛应用,特别是在与外围设备(如显示器、SD卡等)的通信中。
2.4 SPI操作要点
在进行SPI通信时,有一些注意的问题需要注意:
1.时序要求:SPI通信有严格的时序要求,包括SCK(时钟)和MOSI(主设备数据输出)信号。在写数据时,数据必须在SCK信号的上升沿或下降沿之前准备好。在读数据时,数据必须在SCK信号的上升沿或下降沿之后稳定。因此,在进行SPI通信时,要确保时钟信号和数据信号的时序正确。
2.传输长度限制:SPI通信的数据传输长度是固定的,通常为8位。因此,在进行SPI通信时,要确保发送和接收的数据长度正确匹配。如果发送的数据长度超出了接收端的处理能力,可能会导致数据丢失或错误。
3.CS(片选)信号:在SPI通信中,使用CS信号选择要与主设备通信的从设备。在写数据时,必须先将CS信号置低,然后传输数据,最后再将CS信号置高。在读数据时,也必须先将CS信号置低,然后读取数据,最后再将CS信号置高。在进行SPI通信时,要确保正确操作CS信号。
4.数据对齐:在进行SPI通信时,要确保发送的数据以正确的字节顺序和位顺序传输。通常,SPI通信是按照高位优先(MSB first)的方式进行的,即最高位先传输。在进行SPI通信时,要根据通信协议要求,正确对齐数据的字节和位顺序。
5.时钟速率选择:SPI通信的时钟速率可以根据具体的应用需求进行选择。较高的时钟速率可以提高数据传输速度,但也会增加电磁干扰和功耗。因此,在进行SPI通信时,要根据实际情况选择合适的时钟速率。
总之,进行SPI通信时,要注意时序要求、传输长度限制、CS信号操作、数据对齐和时钟速率选择等问题,以确保通信的正确性和可靠性。同时,还需要根据具体的硬件平台和应用需求,进行相应的设置和调试。
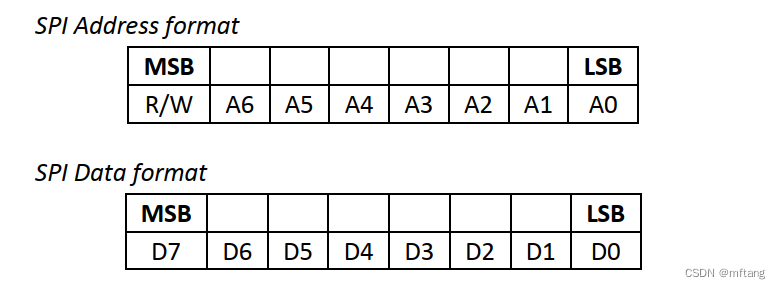
3 SPI操作ICM20608注意的问题
地址位最高位BIT-7 标志R/W, BIT-7 = 1 表示Read, BIT-7 = 0 表示Write


















 5289
5289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









