







首先说几个定义。以下定义是我自己用通俗的语言说的,以便于不太了解图论的同学也能够有个大概的认识。
二分图:有点资料也叫作二部图。它是如果一个图可以分为两个子集X和Y,且X和Y通过有边连接。通俗点说,就是X的每一个边的另一个端点只能是Y里的一个顶点,Y的每个边的另一个端点只能是X的一个顶点。
最大匹配:在二分图中,最大匹配包含的边(连接X中顶点x和Y中顶点y的边)是所有匹配中边数最多的。
完全匹配:在二分图中,有一个连接X和Y的匹配,(现在主要关注X),如果X中所有的顶点都在Y中有对应的匹配,而不管Y中是否所有的点都在X中是否有匹配,我们把这样的匹配叫作(从X到Y的)完全匹配,也叫作饱和X的匹配。完全匹配需要|X|<=|Y|,就是需要X的顶点的个数少于Y的顶点的个数。
完美匹配:如果在二分图中,存在一个匹配,且有X和Y的个数相等,且该匹配对于X是完备的,对于Y也是完备的。通俗的说就是,X和Y的顶点是一一对应的。有的书或资料中也叫作完备匹配,总之就是perfect matching。
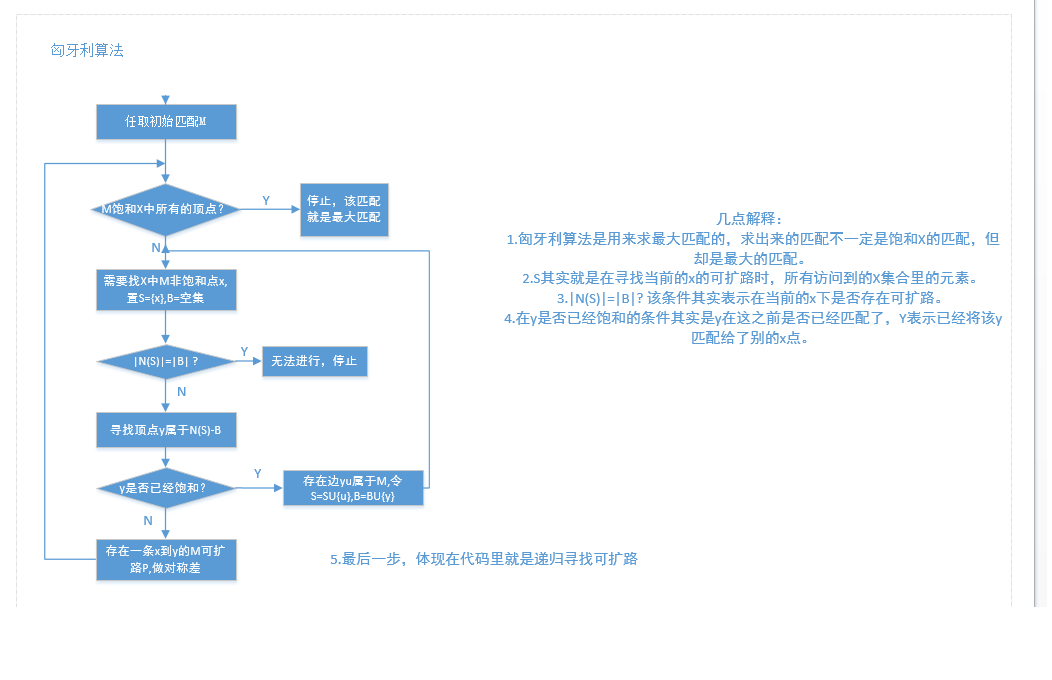
还有一点,我在学习这部分的误解。那就是,匈牙利算法所求出的是二分图(有点资料也叫作二部图)的最大匹配,而该最大匹配不一定是完备,所以也不一定是完美匹配。
直接上代码
广度搜索(DFS)
特点:
优点,实现简洁,理解容易。适用:稠密图,由于边多,DFS找增广路很快。复杂度O(n3)
#include <iostream>
#include <string.h>
using namespace std;
#define MAXN 10 //MAXN表示X集合和Y集合顶点个数的最大值
int nx,ny; //x和y集合中顶点的个数
int g[MAXN][MAXN]; //邻接矩阵,g[i][j]为1表示有连接
int cx[MAXN],cy[MAXN]; //cx[i],表示最终求得的最大匹配中,与x集合中元素Xi匹配的集合Y中顶点的索引
//cy[i],表示最终求得的最大匹配中,与y集合中元素Yi匹配的集合X中顶点的索引
//DFS算法中记录顶点访问状态的数据mk[i]=0表示未访问过,为1表示访问过
int mk[MAXN];
//从集合X中的定顶点u出发,用深度有限的策略寻找增广路
//这种增广路只能是当前的匹配数增加1
int path(int u){
for(int v=0;v<ny;++v){ //考虑所有Yi顶点v
if(g[u][v] && !mk[v]){ //Y中顶点v与u邻接,且没有访问过
mk[v]=1; //访问v
//如果v没有匹配,则直接将v匹配给u,如果v已经匹配了,但是从cy[v],也就是从v之前已经匹配的x出发,找到一条增广路,但是这里记住这里v已经记录访问过了
//如果第一个条件成立,则不会递归调用
if(cy[v]==-1 || path(cy[v])){
cx[u]=v; //把Y中v匹配给X中u
cy[v]=u; //把X中u匹配给Y中v
return 1;
}
}
}
return 0; //如果不存在从u出发的增广路,则返回0
}
int maxMatch(){ //求二分图最大匹配的匈牙利算法
int res=0;
memset(cx,-1,sizeof(cx)); //从0匹配开始增广,将cx和xy各元素都初始化为-1
memset(cy,-1,sizeof(cy));
for(int i=0;i<nx;++i){
if(cx[i]==-1){ //从X集合中每个没有匹配的点出发开始寻找增广路
memset(mk,0,sizeof(mk));
res+=path(i);
}
}
return res;
}
int main() {
nx=3;
ny=4;
g[0][0]=0; g[0][1]=1; g[0][2]=1; g[0][3]=0;
g[1][0]=0; g[1][1]=1; g[1][2]=0; g[1][3]=0;
g[2][0]=1; g[2][1]=0; g[2][2]=1; g[2][3]=1;
int num= maxMatch();
cout<<"num="<<num<<endl;
for(int num=0;num<3;++num){
cout<<"cx["<<num+1<<"] -> "<<cx[num]+1<<endl;
}
cout << "!!!Hello World!!!" << endl; // prints !!!Hello World!!!
return 0;
}
程序运行结果:
深度搜索(BFS)
特点:适用稀疏的二分图,边少,增广路短。复杂度O(N3)
#include <iostream>
#include <string.h>
using namespace std;
#define MAXN 10
int nx=3,ny=4;
int g[MAXN][MAXN];
int cx[MAXN];
int cy[MAXN];
int pred[MAXN];
int queue[MAXN];
int MaxMatch(){
int i,j,y;
int cur,tail;
int res=0;
memset(cx,-1,sizeof(cx));
memset(cy,-1,sizeof(cx));
for(i=0;i<nx;++i){
if(cx[i]!=-1) continue;
for(j=0;j<ny;j++) pred[j]=-2;
cur=tail=0;
for(j=0;j<ny;j++){
if(g[i][j]){
pred[j]=-1;
queue[tail++]=j;
}
}
while(cur<tail){
y=queue[cur];
if(cy[y]==-1) break;
cur++;
for(j=0;j<ny;j++){
if( pred[j]==-2 && g[ cy[y]] [j] ){
pred[j]=y;
queue[tail++]=j;
}
}
}
if(cur==tail) continue;
while(pred[y]>-1){
cx[cy[pred[y]]]=y;
cy[y]=cy[pred[y]];
y=pred[y];
}
cy[y]=i;
cx[i]=y;
res++;
}
return res;
}
int main() {
g[0][0]=0; g[0][1]=1; g[0][2]=1; g[0][3]=0;
g[1][0]=0; g[1][1]=1; g[1][2]=0; g[1][3]=0;
g[2][0]=1; g[2][1]=0; g[2][2]=1; g[2][3]=1;
int num= MaxMatch();
cout<<"num="<<num<<endl;
for(int num=0;num<3;++num){
cout<<"cx["<<num+1<<"] -> "<<cx[num]+1<<endl;
}
cout << "!!!Hello World!!!" << endl; // prints !!!Hello World!!!
return 0;
}程序运行结果一样:















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









