







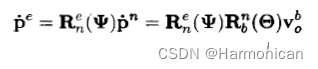
n-frame下到e-frame下速度向量的转移矩阵
相比n-frame,在e-frame中需要考虑到经纬度因素,即,不再把地球表面近似成一个平面,而是一个球面。速度向量转换关系如下
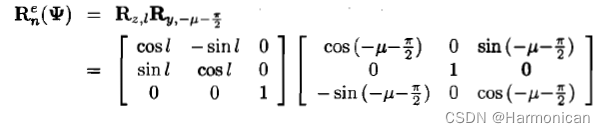
其中,可分为两次旋转,分别是绕z轴旋转 l(即精度),再绕y轴旋转 -μ-π/2(即纬度)。则
可写成如下形式
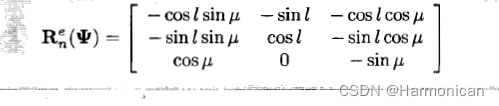
将其计算化简可得到如下关系
MATLAB实现代码如下
function R = R_l_mu(l, mu)
R = [-cos(l) * sin(mu), -sin(l), -cos(l) * cos(mu);
-sin(l) * sin(mu), cos(l), -sin(l) * cos(mu);
cos(mu), 0, -sin(mu) ];
end 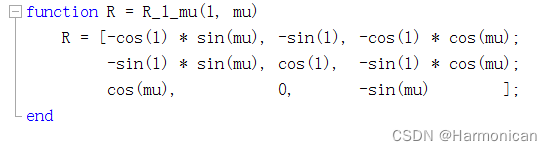
从e-frame坐标得到经纬度
由于地球本身并非一个正圆,故在根据e-frame坐标计算经纬度时需要考虑曲率以及偏心率。计算示意图如下所示
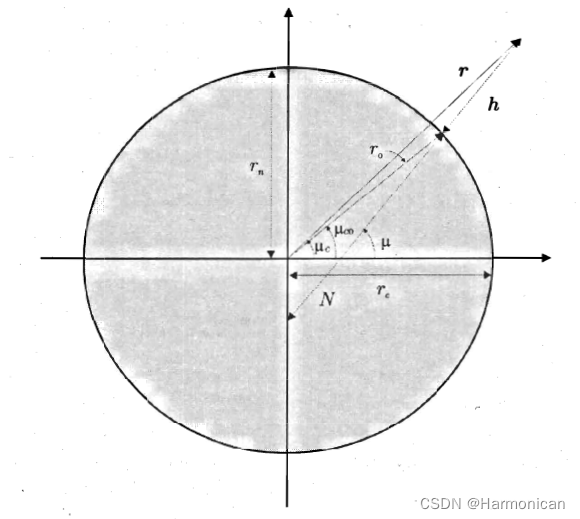
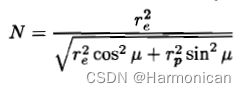
其中,r为所处位置的球心半径,r0为所处位置到地球表面投影处的球心半径,rn为地球的极轴半径,re为赤道半径,N为曲率半径,μc为投影处纬度而μ为所处位置纬度,h为所处位置到地球表面的高度。其中,N可由下式计算得出
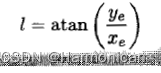
经度可计算为
而纬度以及高度的计算方式如下
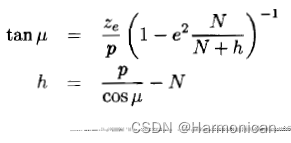
其中,e为地球的偏心率,计算方式如下
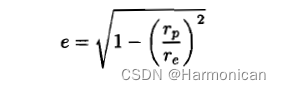
根据上述参数,如下所示为实现从e-frame坐标到经纬度以及高度的算法
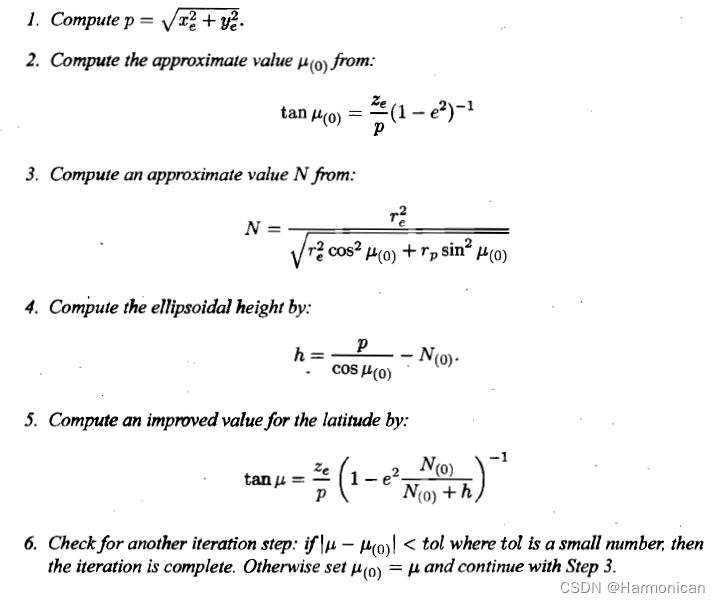
使用MATLAB代码实现如下
function [l, mu, h] = ECEF_coor_2_l_mu_h(x, y, z)
alpha = 1e-6;
re = 6378137;
rp = 6356752;
e = 0.0818;
p = (x.^2 + y.^2).^0.5;
mu0 = atan((z / p) * (1 - e.^2).^(-1));
N0 = re.^2 / (re.^2 * cos(mu0).^2 + rp.^2 * sin(mu0).^2).^0.5;
N = N0;
h = p / cos(mu0) - N0;
mu = (z / p) * (1 - e.^2 * (N0 / (N0 + h))).^(-1);
while(1)
if abs(mu-mu0) < alpha
break;
else
mu0 = mu;
N = re.^2 / (re.^2 * cos(mu0).^2 + rp * sin(mu0).^2).^0.5;
h = p / cos(mu0) - N0;
mu = (z / p) * (1 - e.^2 * (N0 / (N0 + h))).^(-1);
end
end
l = atan(y / x);
end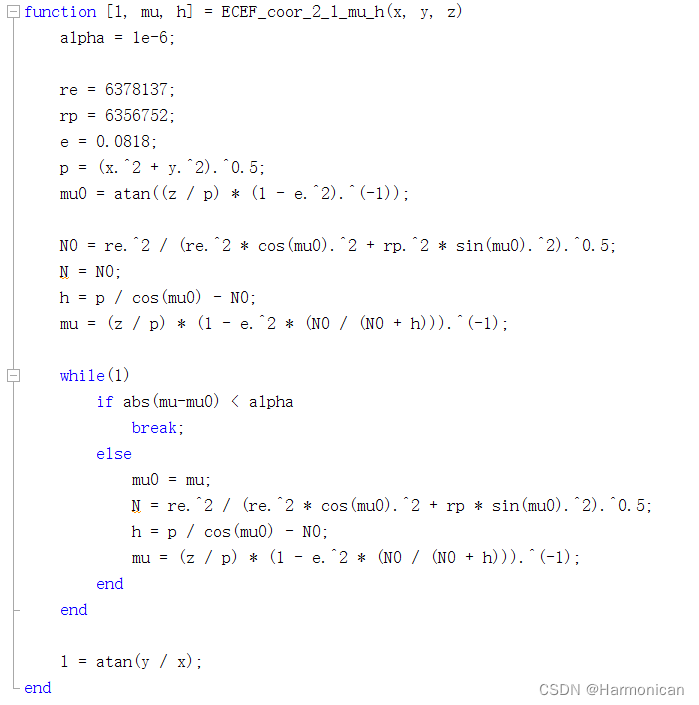
从经纬度得到e-frame坐标
从经纬度得到e-frame坐标公式如下
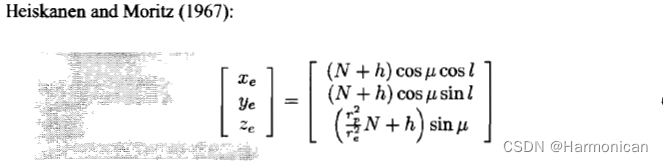
MATLAB代码实现如下
function [x, y, z] = l_mu_h_2_ECEF_coor(l, mu, h)
re = 6378137;
rp = 6356752;
N = re.^2 / (re.^2 * cos(mu).^2 + rp.^2 * sin(mu).^2).^0.5;
x = (N + h) * cos(mu) * cos(l);
y = (N + h) * cos(mu) * sin(l);
z = (rp.^2 / re.^2 * N + h) * sin(mu);
end















 1937
1937











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









