







四元数定义
四元数定义如下

其中η应为实部,ε应为虚部。
在欧拉角形式下,旋转矩阵可由如下求得

而在四元数形式下, η与ε分别定义为
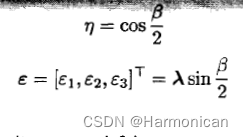
其中λ为单位向量,应满足

则四元数q可表示为

且满足内积为1,即。
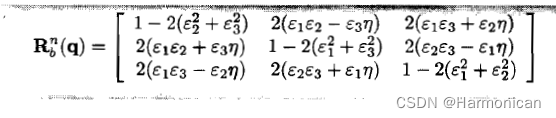
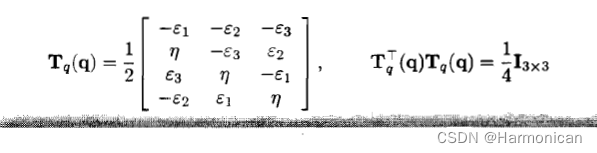
则坐标转移矩阵为

线速度转移矩阵求解
按照之前定义,b-frame到n-frame的线速度转移方程应为
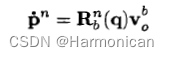
则根据上文中提到的转移矩阵的求解公式可算出
则n-frame下坐标的变化量为

转移矩阵求解的MATLAB实现代码如下
function R = Rquat(quat)
Ita = quat(1);
eps = imag(quat(2 : 4));
R = eye(3, 3) + 2 * Ita * smtrix_gen(eps) + 2 * smtrix_gen(eps)^2;
% R = [1 - 2 * (eps2.^2 + eps3.^2), 2 * (eps1 * eps2 - eps3 * Ita), 2 *(eps1 * eps3 + eps2 * Ita);
% 2 * (eps1 * eps2 + eps3 * Ita), 1 - 2 * (eps1.^2 + eps3.^2), 2 *(eps2 * eps3 - eps1 * Ita);
% 2 * (eps1 * eps3 - eps2 * Ita), 2 * (eps2 * eps3 + eps1 * Ita), 1 - 2 * (eps1.^2 + eps2.^2)];
end 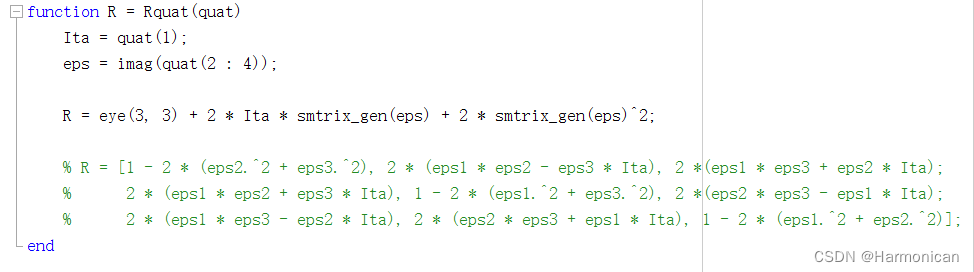
角速度转移矩阵求解
从b-frame到n-frame角速度转移方程定义如下
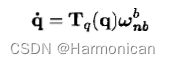
其中
则四元数形式下b-frame到n-frame角速度变化量为
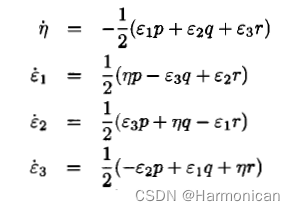
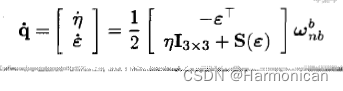
向量形式可表示为
MATLAB实现代码如下
function T = angle_trans_quat(quat)
T = zeros(4, 3);
Ita = quat(1);
eps = imag(quat(2 : 4));
T(1, :) = T(1, :) - eps';
temp_T = Ita * eye(3, 3) + smtrix_gen(eps);
T(2 : 4, :) = temp_T;
T = 0.5 * T;
end
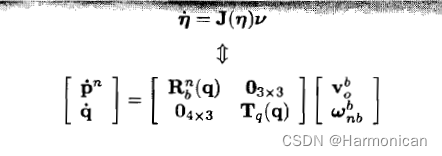
总结,6自由度下,四元数形式的b-frame到n-frame 坐标转移的动力学方程组的向量(矩阵)表示方式如下
求解的MATLAB实现代码如下
function [J, J1, J2] = b_frame2n_frame_quat(quat)
J1 = Rquat(quat);
J2 = angle_trans_quat(quat);
J = [J1, zeros(3, 3);
zeros(4, 3), J2];
end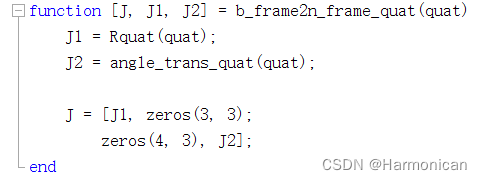















 2817
2817











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









