







这篇继续凸包得的寻找,上篇文章中使用了暴力的方法,在网上又看了一些资料下面会介绍常用的算法 Graham_Scan
首先介绍一下有向面积的概念:
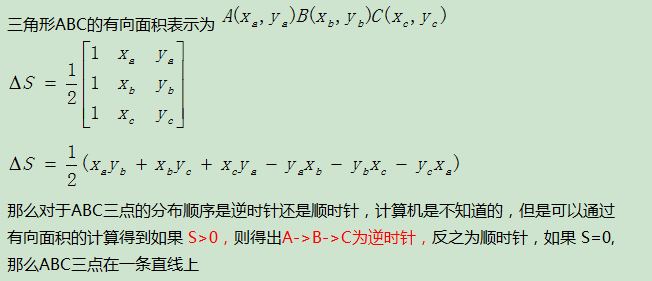
算法的大致步骤:
1)对于给定的点集 data 寻找其中y坐标最小的点作为起始点p
2) 把坐标原点移动到p处,然后计算每个点与x轴正方向的夹角
3)根据夹角的大小排序,得到排序后的点集data
4)设点集data中有N个数据,数组CHS用来保存满足条件的边界点
把data[N-1]和data[0]放入CHS中,然后放入data[1],如果CHS[0](data[N-1]),CHS[1](data[0]),CHS[2](data[1]),
三点构成的三角形有向面积为正(注意CHS[0]是起点,CHS[2]是终点),则认为data[1]满足边界条件继续把data[2]放入CHS中;
放入data[2]后如果发现CHS[1](data[0]),CHS[2](data[1]),CHS[3](data[2]),构成的有向面积为负,那么判断data[1]是不满足条件的,
需要删除;接着按照上面的规律放入剩余的全部数据;示意图如下
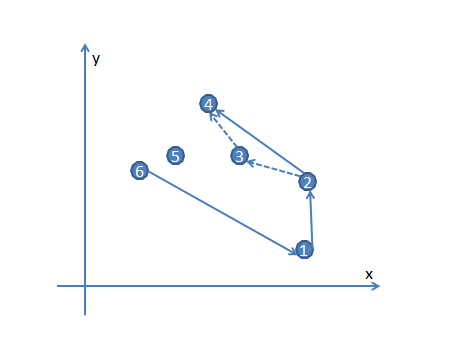
上图中序号越大,夹角越大。先把6号和1号放入数组CHS中,扫描2号发现612满足逆时针条件;当按照夹角由小到大扫描时会先扫描到3号,而123组合满足逆时针条件;接着扫描到4号,234组合不满足逆时针条件,所以就要删除3号直接连接24号,此时124组合满足逆时针条件;接着就是扫描5号,观察245是否满足逆时针条件
下面贴上代码
#include "stdafx.h"
#include "convexhull.h"
#include <cmath>
#include <cstdlib>
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
#define Width 640
#define Height 480
#define PointNum 18
struct _Point
{
Point pt;
float angle;
void operator=(const _Point &pp)
{
this->pt = pp.pt;
this->angle = pp.angle;
}
bool operator >(const _Point &pp)
{
return(this->angle > pp.angle);
}
};
static vector<_Point> data(PointNum);//原始数据
static vector<_Point> CHS(PointNum);//保存最后结果
static int sp = 0; //用来指示数组CHS的下标
//计算有向面积
//如果 返回值大于零则ABC是按照逆时针分布,=0 ABC在一条直线上,<0 ABC顺时针分布
int cross(Point A, Point B, Point C)
{
return(A.x*B.y + B.x*C.y + C.x*A.y - A.y*B.x - B.y*C.x - C.y*A.x);
}
//
void Swap(_Point &a, _Point &b)
{
_Point temp = a;
a = b;
b = temp;
}
//随机产生点
void generatePoint(vector<_Point> & input)
{
RNG rng(1234);
for (int i=0; i<PointNum; i++)
{
input[i].pt.x = rng.uniform(50, 540);
input[i].pt.y = rng.uniform(50, 400);
}
}
//简单排序
template<class T>
void bubbleSort(T & a, int n)
{
//for (int i=0; i<n-1 ; i++)
//{
// for (int j=i+1; j<n; j++)
// {
// if(a[i]>a[j])
// {
// Swap(a[i], a[j]);
// }
// }
//}
bool changed = true;
for (int i=0; i<n && changed; i++)
{
for (int j=0; j<n-i-1; j++)
{
changed = false;
if(a[j] > a[j+1])
{
Swap(a[j], a[j+1]);
changed = true;
}
}
}
}
//Graham Scan 算法的实现
void GrahamScan()
{
for(int i=0; i<data.size(); i++)//寻找y值最小的点
{
if(data[0].pt.y > data[i].pt.y)
Swap(data[0], data[i]);
}
//移动坐标系原点到data[0]处
for(int i=0; i<data.size(); i++)
{
data[i].pt.x -= data[0].pt.x;
data[i].pt.y -= data[0].pt.y;
data[i].angle = atan2((float)data[i].pt.y, (float)data[i].pt.x);
}
//按与x轴夹角由小到大排序
bubbleSort(data, data.size());
for(int i=0; i<data.size(); i++)
cout<<data[i].angle<<endl;
CHS[0] = data[PointNum-1];
CHS[1] = data[0];
int k = 1;
sp = 2;
while(k < data.size())
{
CHS[sp] = data[k];
if(cross(CHS[sp-2].pt, CHS[sp-1].pt, CHS[sp].pt) > 0)//如果连续的三点为逆时针则选中当前点
{
k++;
sp++;
}
else //如果为顺时针则要剔除上一个点
{
sp--;
}
}
}
void GradamScan_test()
{
Mat img;
img.create(Size(Width, Height), CV_8UC3);
generatePoint(data);
GrahamScan();
for (int i=0; i<data.size(); i++)
{
circle(img, data[i].pt, 10, Scalar(0,0,255));
}
for (int i=0; i<sp-1; i++)
{
line(img, CHS[i].pt, CHS[i+1].pt, Scalar(0,0,255), 2, 8);
imshow("ss", img);
waitKey(1000);
}
}
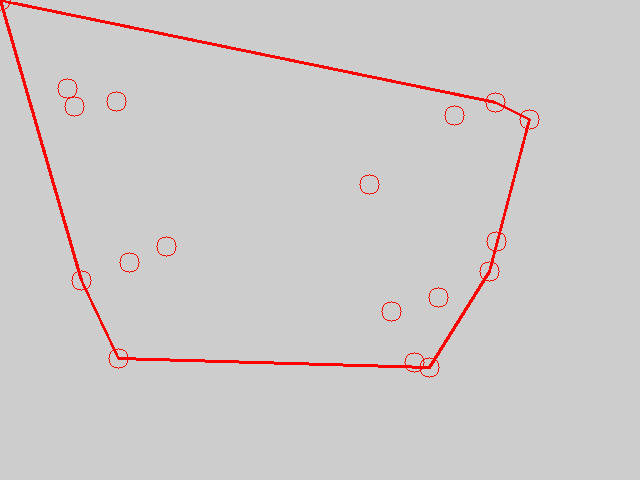
运行函数GradamScan_test,结果如下图















 1281
1281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









