







一些关于mobile visual search的文章,网上下载不到原文。
阅读时间:2015-04-16
Rotation-invariant fast features for large-scale recognition and real-time tracking
这是一篇典型的特征点文章,作者Gabriel Takacs在文章中用了自己在CVPR10的RIFF描述子:Unified Real-Time Tracking and Recognition with Rotation-Invariant Fast Features。
关键点提取:
- 尺度空间局部极值点采用CenSurE算法(OpenCV中StarFeatureDetector),利用积分图像计算双层高斯拉普拉斯滤波器响应;
- 用Harris矩阵filter边缘响应;

关键点描述:
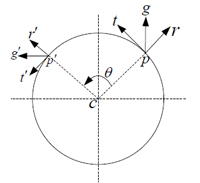
梯度方向直方图(HoG),增加了方向不变性(无需计算主方向):
- 区别于方形网格cell,文章采用环形cell;
- 将g=(dx,dy)进行径向基投影后(投影后的值不因图像旋转而变化),再计算直方图;
- 径向基投影可以直接用方向梯度算子计算,这步用来加速。
计算梯度强度和方向时可以用lookup-table;
- 采用Compressed HoG的方式,压缩直方图数据———-CHoG仅发布了binary file(已测试ubuntu下能运行),作者说source code有rightcopy;
Laplacian embedding and key points topology verification for large scale mobile visual identification
二作Li Zhu前后在USA华为和USA三星工作过,文章关注最小化mobile请求传输bit率和最大化识别精度,提出了特征描述维度压缩和图像匹配方案。
特征维度压缩,作者也发在ICASSP2012:
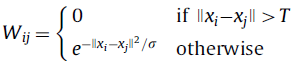
- 相对PCA-SIFT,PCA是最小化数据误差的降维方法,文中提到应该最大化保留关键点间最近邻关系;
- 计算图像中所有特征点间的距离权重
- XL
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









