






顶刊复现基于球形向量改进的粒子群算法PSO的无人机3D路径规划,spherical vector based particle swarm optimization,MATLAB编写,包含参考文献,内部有注释,可自行修改起点终点和障碍物位置。
ID:27599802478445169
福由心造
基于球形向量改进的粒子群算法在无人机三维路径规划中的应用
一、引言
随着无人机技术的飞速发展,如何实现高效、精确的无人机三维路径规划成为了研究的热点问题。本文旨在探讨基于球形向量改进的粒子群算法(PSO)在无人机3D路径规划中的应用。我们将详细介绍如何利用这种算法,结合MATLAB编程,实现无人机在复杂环境下的高效路径规划。
二、背景知识
粒子群优化算法(Particle Swarm Optimization,PSO)是一种基于群体智能的优化算法,模拟鸟群、鱼群等生物群体的社会行为。其通过个体间的信息交流和协作,完成问题的优化求解。近年来,球形向量改进的粒子群算法在优化问题上表现出了良好的性能,特别是在解决高维度、非线性、离散等复杂问题时。
三、方法论述
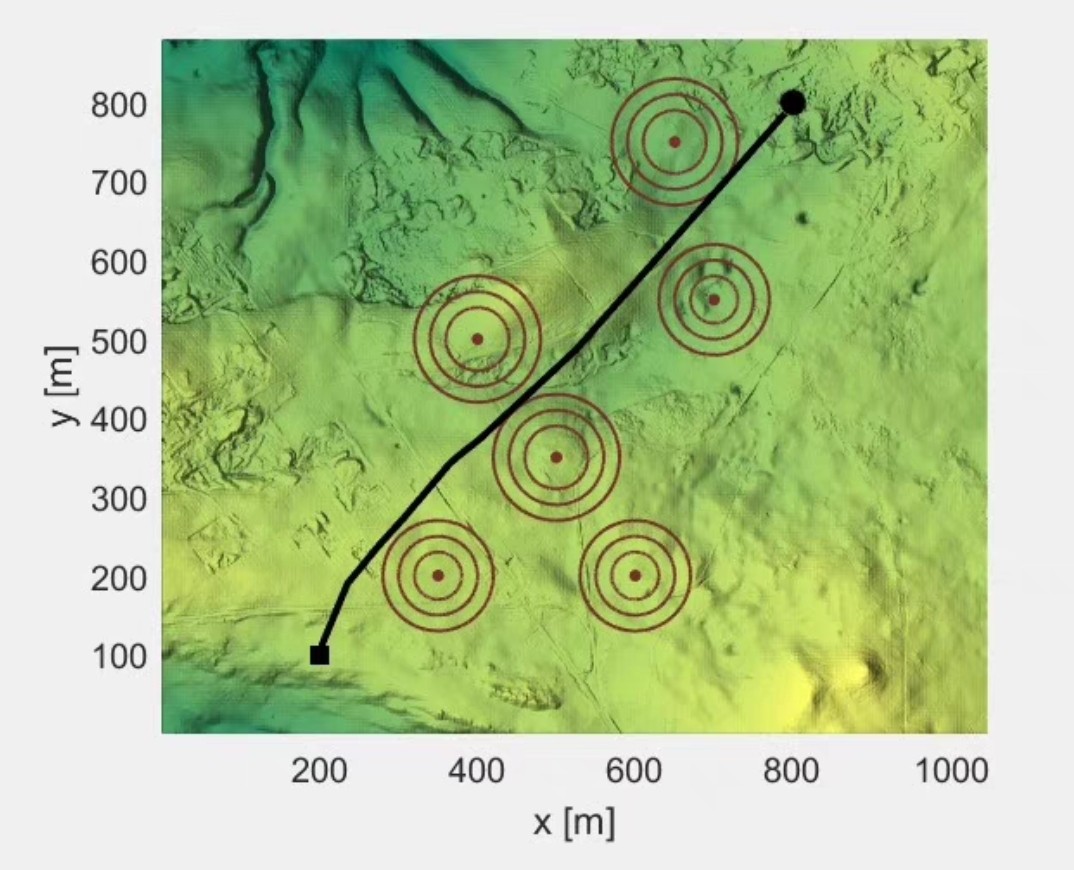
在无人机的三维路径规划中,我们采用球形向量改进的粒子群算法进行优化。首先,我们需要设定无人机的起点和终点,以及飞行过程中的障碍物位置。这些位置信息将作为算法的约束条件。在算法运行过程中,粒子将根据设定的目标函数(如路径长度、飞行时间等)进行搜索,寻找最优路径。
算法的具体步骤如下:
- 初始化粒子群,包括粒子的位置、速度和加速度。
- 根据目标函数计算粒子的适应度值。
- 更新粒子的位置、速度和加速度,包括粒子的全局最优位置和局部最优位置。
- 判断是否满足终止条件(如达到最大迭代次数或找到满足要求的最优解),若满足则输出最优路径,否则继续迭代。
四、实现细节
我们的实现基于MATLAB编程。在实现过程中,我们注重代码的可读性和可修改性。代码内部包含丰富的注释,方便其他开发者理解和使用。同时,我们也提供了一些参考文献,以供学习者参考。
在实现过程中,我们可以自行修改无人机的起点、终点和障碍物的位置,以适应不同的场景和需求。此外,我们还可以根据实际需求调整算法的参数,如粒子的数量、迭代次数等,以达到更好的优化效果。
五、实验结果与分析
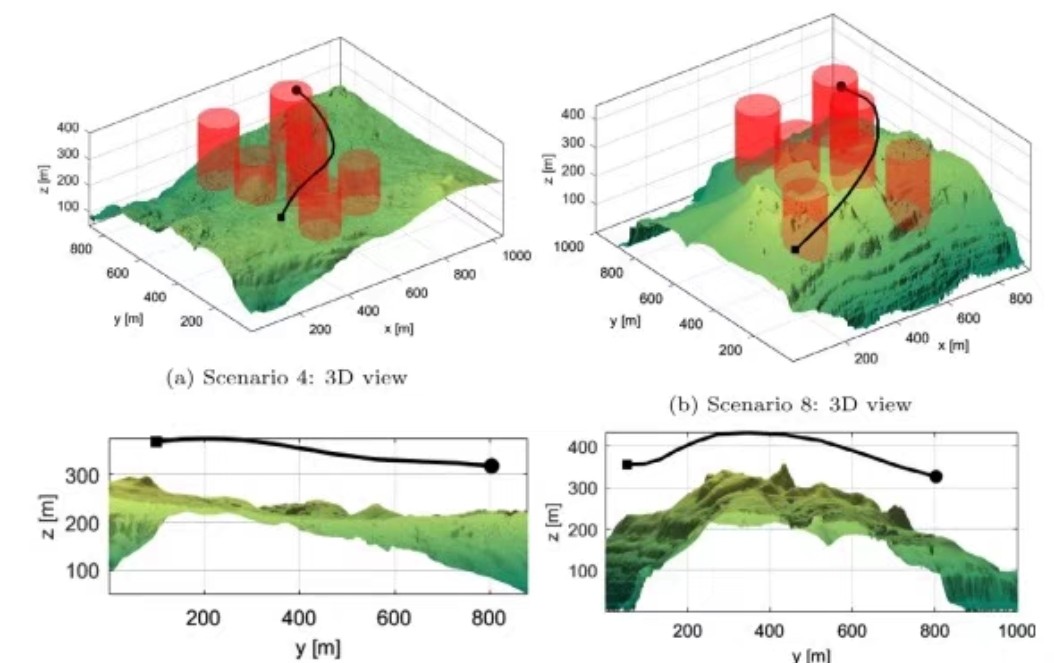
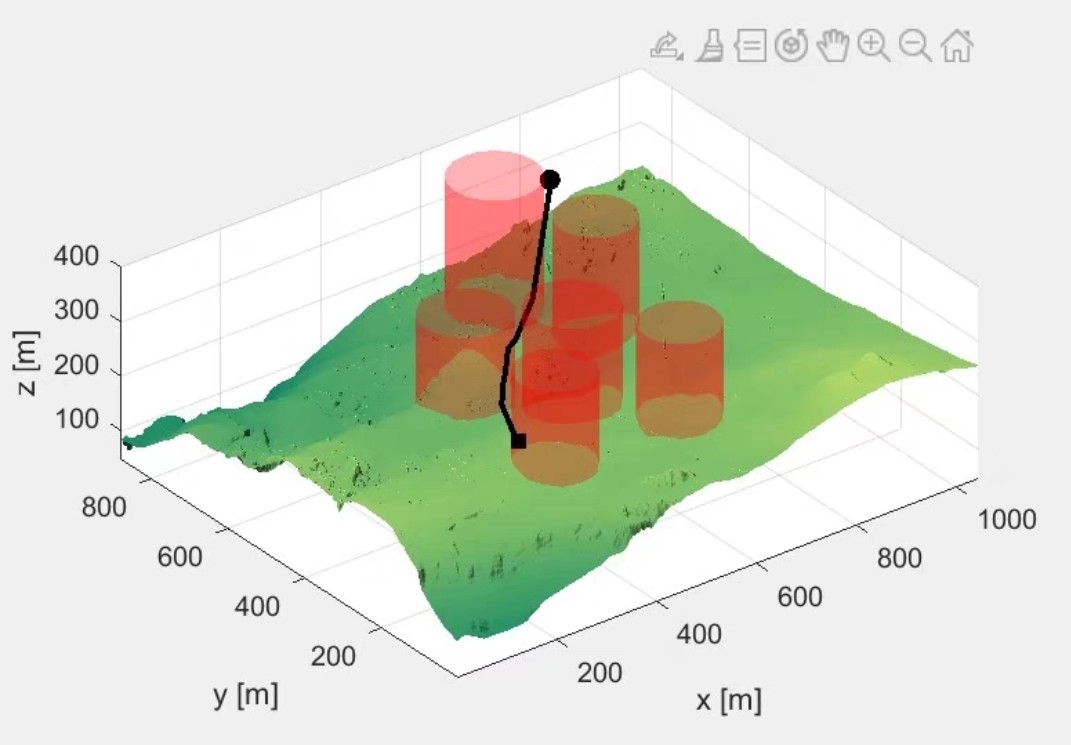
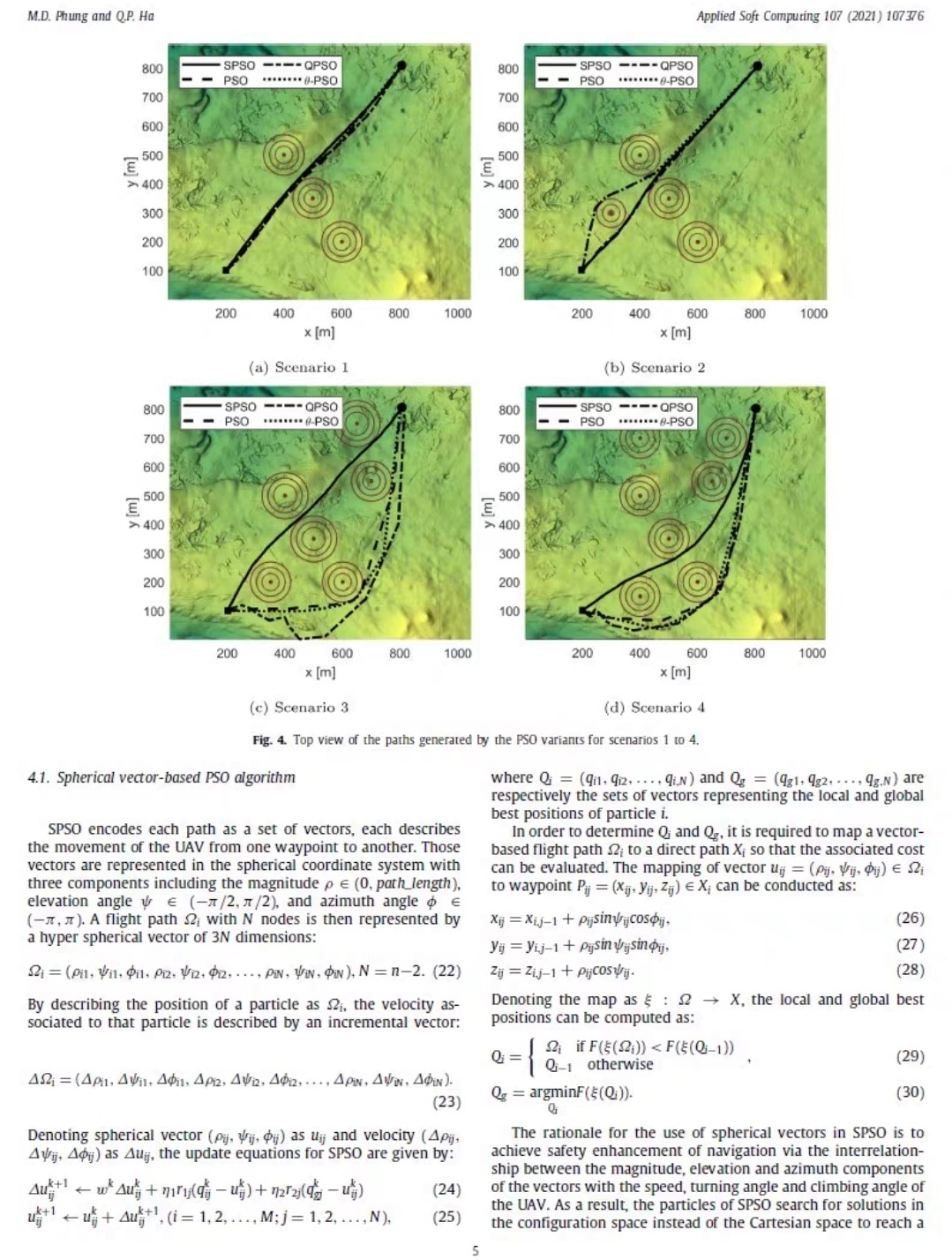
为了验证算法的有效性,我们在不同的场景下进行了实验。实验结果表明,基于球形向量改进的粒子群算法在无人机三维路径规划中具有良好的性能。在复杂的飞行环境下,该算法能够快速地找到最优路径,有效地避开障碍物。
六、结论
本文介绍了基于球形向量改进的粒子群算法在无人机三维路径规划中的应用。通过详细的算法介绍、实现细节和实验结果,我们展示了该算法的有效性和实用性。未来,我们将进一步研究该算法在其他领域的应用,如自动驾驶、机器人路径规划等。
七、展望与未来工作
虽然基于球形向量改进的粒子群算法在无人机三维路径规划中取得了一定的成果,但仍有许多问题需要进一步研究和解决。例如,如何自动适应地调整算法的参数,以提高算法的效率和性能;如何处理动态环境下的路径规划问题;如何将该算法应用于其他类型的无人机等。
八、参考文献
[此处列出相关的参考文献]
九、总结
本文详细阐述了基于球形向量改进的粒子群算法在无人机三维路径规划中的应用。通过理论介绍、实现细节、实验结果和分析,我们展示了该算法的有效性和实用性。希望本文能为相关研究提供参考和启示。
相关的代码,程序地址如下:http://matup.cn/802478445169.html
















 496
496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









