






[汽车]基于引入APF轨迹规划的MPC避障轨迹跟踪
运动学模型,基本功能如视频所示,包,需要改动算法场景等内容额外补点
ID:68280802820993131
颜妍都市
汽车领域中基于APF轨迹规划的MPC避障轨迹跟踪深度解析
随着自动驾驶技术的飞速发展,汽车的路径规划和避障策略成为了研究的热点。本文旨在探讨在汽车领域中引入APF(势能场)轨迹规划的MPC(模型预测控制)避障轨迹跟踪技术,并结合运动学模型进行深度解析。
一、背景介绍
在现代自动驾驶系统中,车辆的轨迹跟踪和避障功能是其核心功能之一。特别是在复杂的交通环境中,车辆需要能够快速、准确地做出反应,确保行驶的安全性和舒适性。这就需要有一种高效的路径规划和避障策略。而基于APF轨迹规划的MPC方法,正是实现这一目标的理想方案之一。
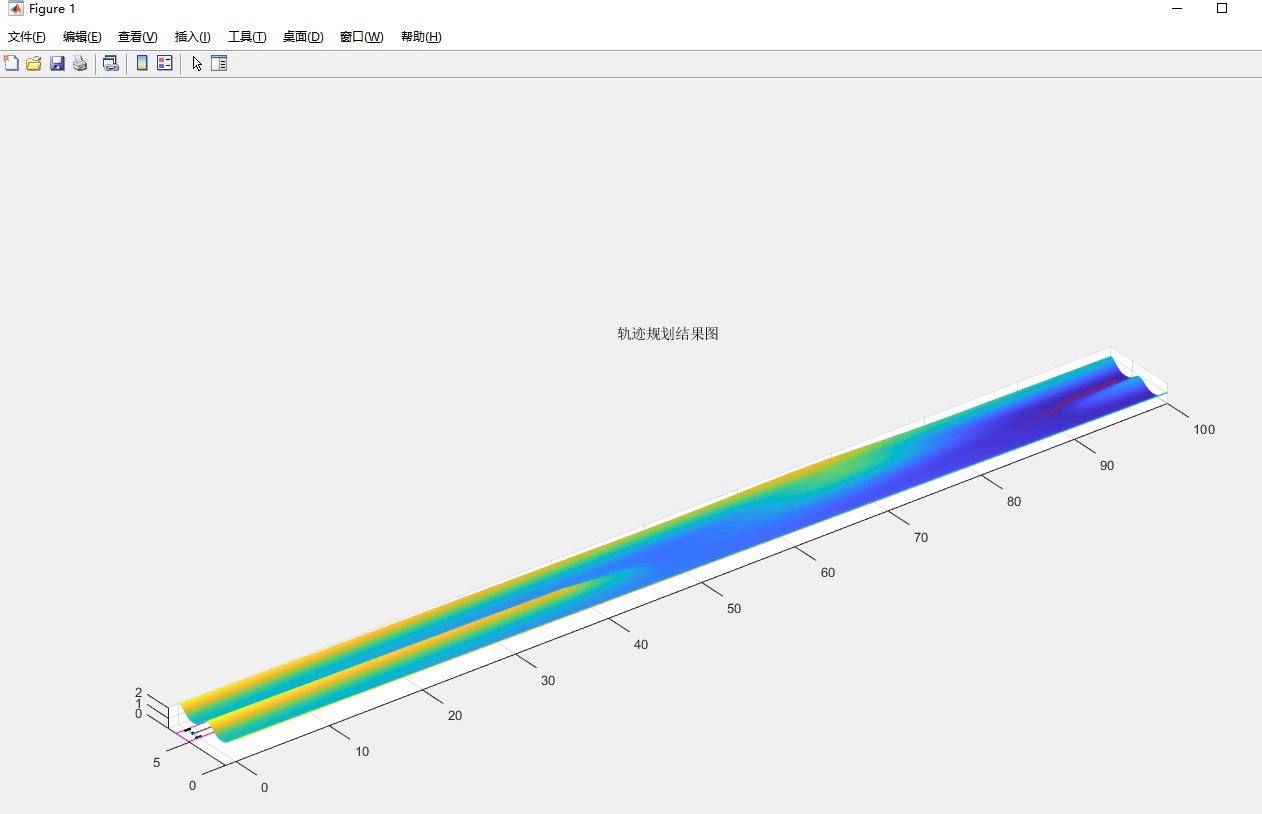
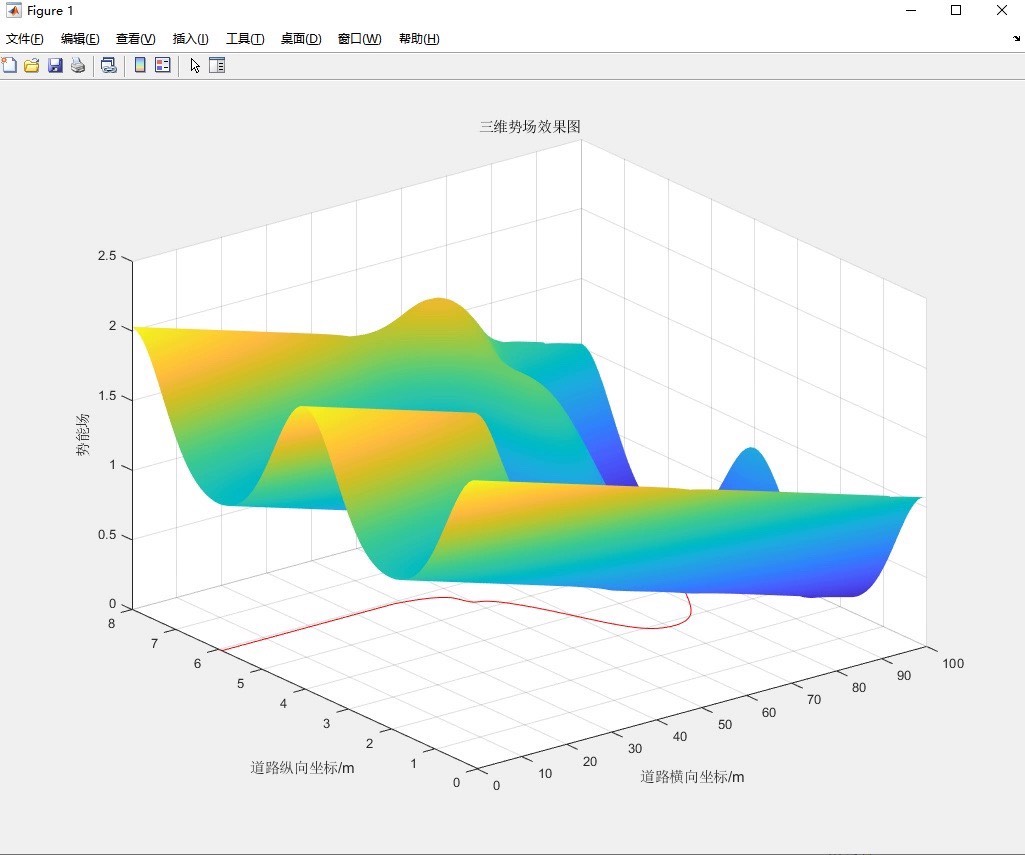
二、APF轨迹规划简述
APF(势能场)轨迹规划是一种基于势能场的路径规划方法。它通过将空间划分为不同的势能区域,并计算每个区域内的势能值,从而引导车辆沿着低势能路径行驶。这种方法的优点是计算效率高、实时性好,并且能够处理复杂的道路和交通环境。
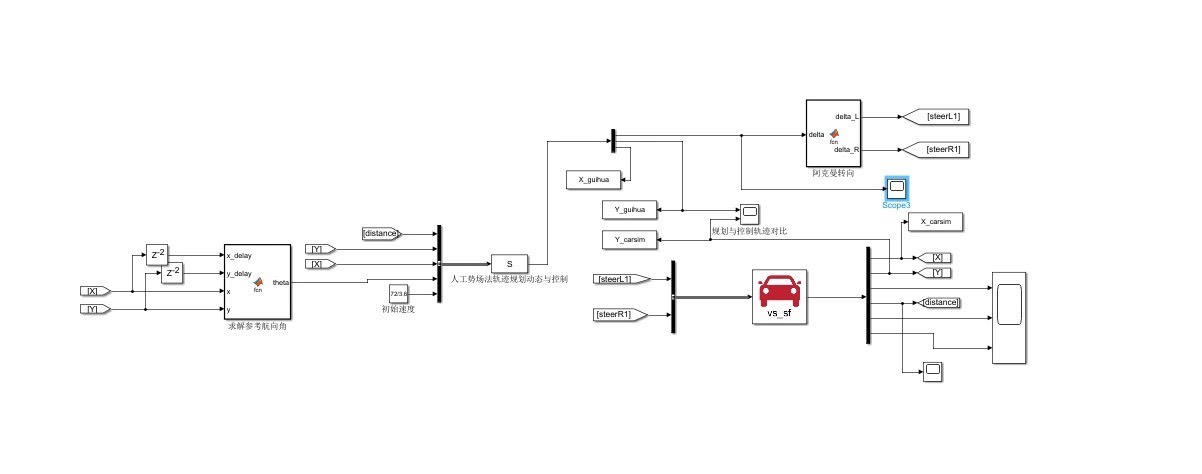
三、MPC在APF轨迹规划中的应用
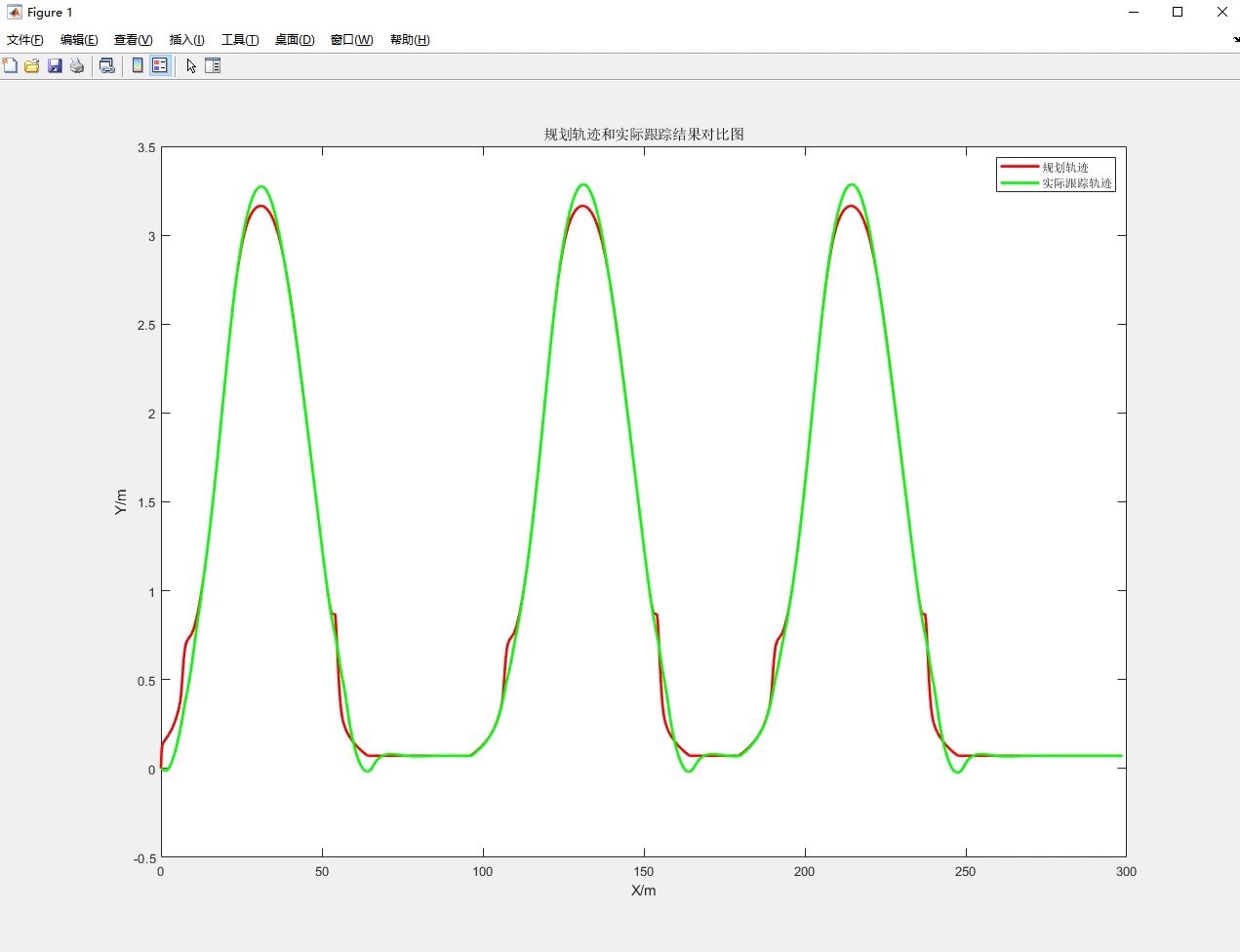
模型预测控制(MPC)是一种优化控制方法,它通过在线优化一个有限时间窗口内的性能指标,来生成控制命令。在汽车领域中,MPC被广泛用于车辆的轨迹跟踪和避障。当与APF轨迹规划结合时,MPC能够实时调整车辆的行驶轨迹,以确保车辆能够准确、安全地跟踪预设路径,并避开道路上的障碍物。
四、运动学模型的重要性
为了实现对车辆的精确控制,一个准确的运动学模型是必不可少的。运动学模型能够描述车辆的动态行为,包括车辆的加速、减速、转向等。通过将APF轨迹规划和MPC算法建立在运动学模型之上,可以大大提高系统的控制精度和稳定性。
五、功能展示与场景应用分析
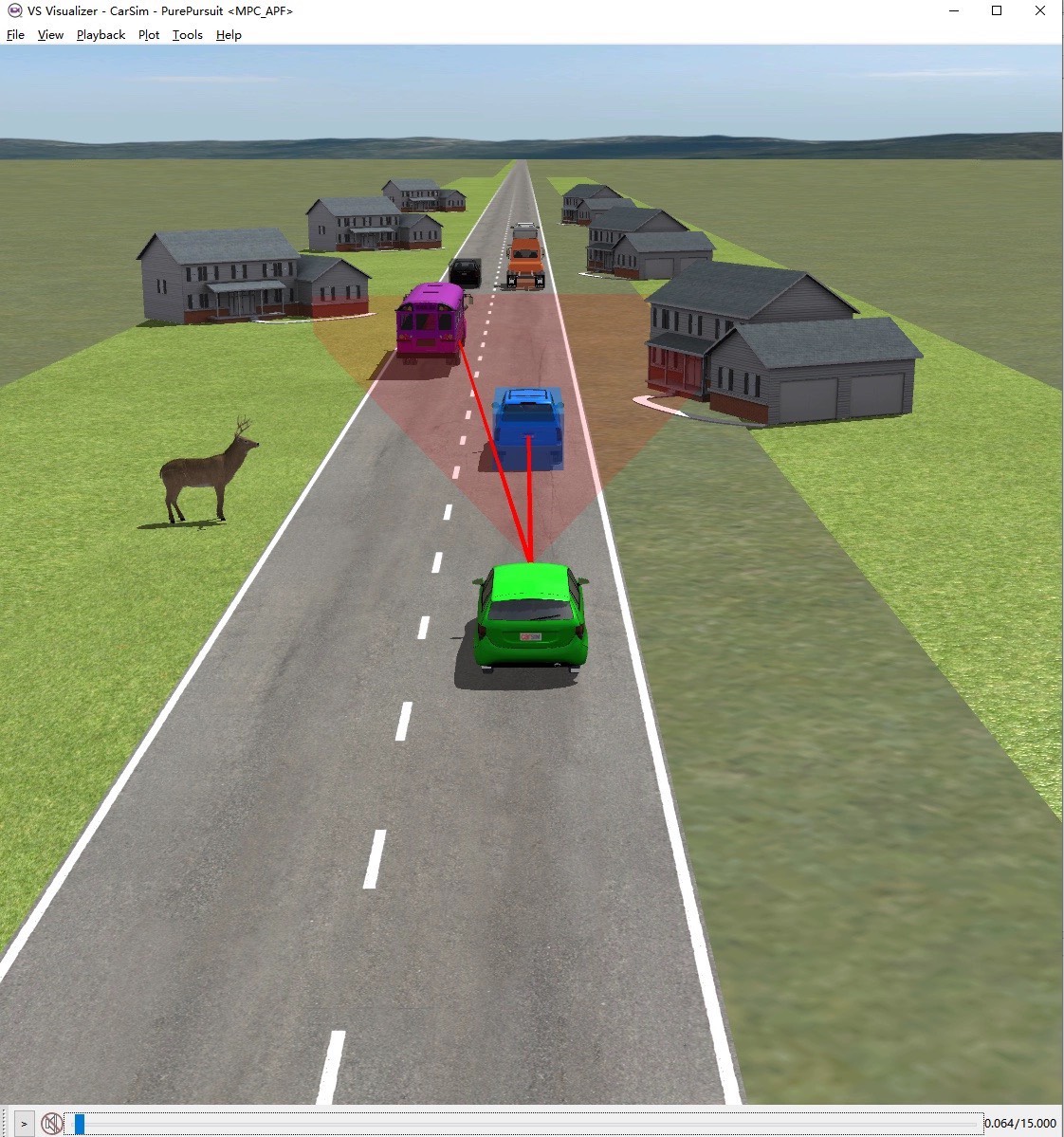
基本功能如视频所示,通过引入APF轨迹规划的MPC避障轨迹跟踪技术,车辆能够在复杂的交通环境中准确跟踪预设路径,并自动避开道路上的障碍物。在实际应用中,该技术适用于多种场景,包括高速公路、城市街道、停车场等。特别是在紧急情况下的避障反应,该技术能够显著提高车辆的安全性和乘客的舒适性。
六、额外补充点:算法场景的改动与优化
虽然APF轨迹规划与MPC的结合在汽车领域中取得了显著的成果,但在实际应用中仍需要根据不同场景进行算法的改动与优化。例如,在高速公路上行驶时,车辆需要处理的是宽阔的视野和高速的行驶状态;而在城市街道上,车辆需要处理的是复杂的交通情况和狭窄的空间。针对这些差异,我们需要对算法进行相应的调整,以提高其适应性和性能。此外,对于不同型号的车辆和不同的驾驶风格,也需要对算法进行相应的优化。
七、总结与展望
基于APF轨迹规划的MPC避障轨迹跟踪技术为汽车的自动驾驶带来了全新的解决方案。通过结合运动学模型,该技术能够实现高效、准确的路径跟踪和避障功能。然而,在实际应用中仍需要进一步的研究和优化,以适应不同的场景和车辆需求。展望未来,随着技术的不断进步和算法的持续优化,基于APF轨迹规划的MPC避障轨迹跟踪技术将在汽车领域发挥更大的作用,为自动驾驶的普及和发展做出更大的贡献。
相关的代码,程序地址如下:http://matup.cn/802820993131.html
















 5294
5294

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









