






SENet不是一个全新的网络模型,而是相当于提出了一个即插即用的高性能小插件
SEblock的具体介绍
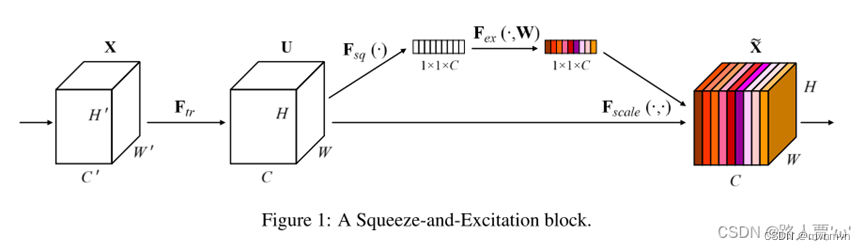
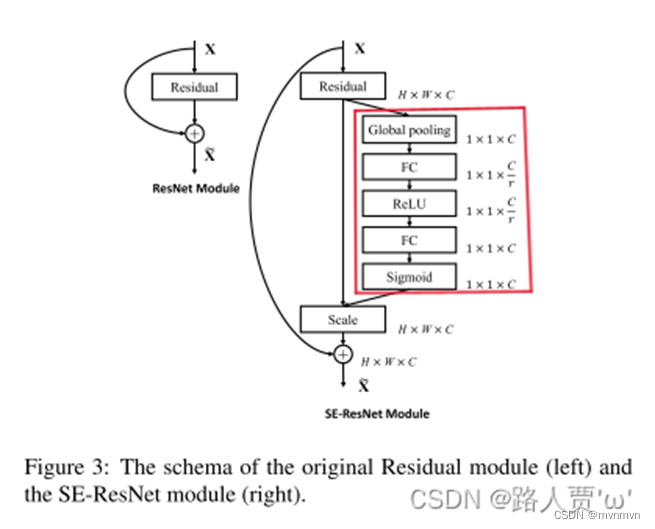
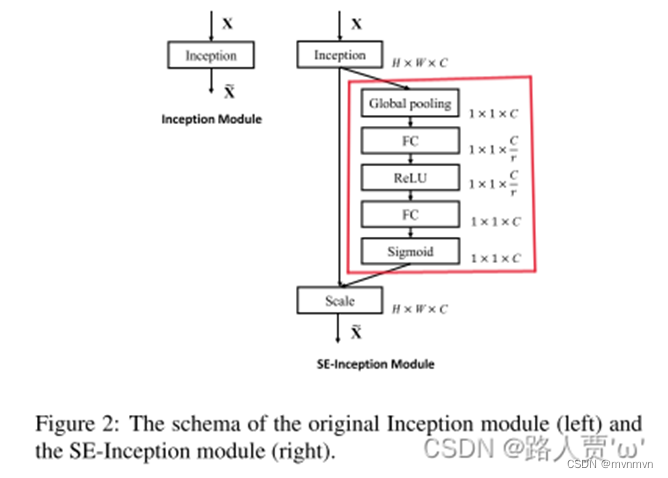
Sequeeze:Fsq操作就是使用通道的全局平均池化,将包含全局信息的W×H×C 的特征图直接压缩成一个1×1×C的特征向量,即将每个二维通道变成一个具有全局感受野的数值,此时1个像素表示1个通道,屏蔽掉空间上的分布信息,更好的利用通道间的相关性。
具体操作:对原特征图50×512×7×7进行全局平均池化,然后得到了一个50×512×1×1大小的特征图,这个特征图具有全局感受野。
Excitation :基于特征通道间的相关性,每个特征通道生成一个权重,用来代表特征通道的重要程度。由原本全为白色的C个通道的特征,得到带有不同深浅程度的颜色的特征向量,也就是不同的重要程度。
具体操作:输出的50×512×1×1特征图,经过两个全连接层,最后用一 个类似于循环神经网络中门控机制,通过参数来为每个特征通道生成权重,参数被学习用来显式地建模特征通道间的相关性(论文中使用的是sigmoid)。50×512×1×1变成50×512 / 16×1×1,最后再还原回来:50×512×1×1
Reweight:将Excitation输出的权重看做每个特征通道的重要性,也就是对于U每个位置上的所有H×W上的值都乘上对应通道的权值,完成对原始特征的重校准。
具体操作:50×512×1×1通过expand_as得到50×512×7×7, 完成在通道维度上对原始特征的重标定,并作为下一级的输入数据。

import torch
import torch.nn as nn
import torch.nn.functional as F
from torchsummary import summary
'''-------------一、SE模块-----------------------------'''
# 全局平均池化+1*1卷积核+ReLu+1*1卷积核+Sigmoid
class SE_Block(nn.Module):
def __init__(self, inchannel, ratio=16):
super(SE_Block, self).__init__()
# 全局平均池化(Fsq操作)
self.gap = nn.AdaptiveAvgPool2d((1, 1))
# 两个全连接层(Fex操作)
self.fc = nn.Sequential(
nn.Linear(inchannel, inchannel // ratio, bias=False), # 从 c -> c/r
nn.ReLU(),
nn.Linear(inchannel // ratio, inchannel, bias=False), # 从 c/r -> c
nn.Sigmoid()
)
def forward(self, x):
# 读取批数据图片数量及通道数
b, c, h, w = x.size()
# Fsq操作:经池化后输出b*c的矩阵
y = self.gap(x).view(b, c)
# Fex操作:经全连接层输出(b,c,1,1)矩阵
y = self.fc(y).view(b, c, 1, 1)
# Fscale操作:将得到的权重乘以原来的特征图x
return x * y.expand_as(x)
'''-------------二、BasicBlock模块-----------------------------'''
# 左侧的 residual block 结构(18-layer、34-layer)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inchannel, outchannel, stride=1):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(inchannel, outchannel, kernel_size=3,
stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(outchannel)
self.conv2 = nn.Conv2d(outchannel, outchannel, kernel_size=3,
stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(outchannel)
# SE_Block放在BN之后,shortcut之前
self.SE = SE_Block(outchannel)
self.shortcut = nn.Sequential()
if stride != 1 or inchannel != self.expansion * outchannel:
self.shortcut = nn.Sequential(
nn.Conv2d(inchannel, self.expansion * outchannel,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion * outchannel)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.bn2(self.conv2(out))
SE_out = self.SE(out)
out = out * SE_out
out += self.shortcut(x)
out = F.relu(out)
return out
'''-------------三、Bottleneck模块-----------------------------'''
# 右侧的 residual block 结构(50-layer、101-layer、152-layer)
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inchannel, outchannel, stride=1):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inchannel, outchannel, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(outchannel)
self.conv2 = nn.Conv2d(outchannel, outchannel, kernel_size=3,
stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(outchannel)
self.conv3 = nn.Conv2d(outchannel, self.expansion * outchannel,
kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(self.expansion * outchannel)
# SE_Block放在BN之后,shortcut之前
self.SE = SE_Block(self.expansion * outchannel)
self.shortcut = nn.Sequential()
if stride != 1 or inchannel != self.expansion * outchannel:
self.shortcut = nn.Sequential(
nn.Conv2d(inchannel, self.expansion * outchannel,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion * outchannel)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = F.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
SE_out = self.SE(out)
out = out * SE_out
out += self.shortcut(x)
out = F.relu(out)
return out
'''-------------四、搭建SE_ResNet结构-----------------------------'''
class SE_ResNet(nn.Module):
def __init__(self, block, num_blocks, num_classes=10):
super(SE_ResNet, self).__init__()
self.in_planes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=3,
stride=1, padding=1, bias=False) # conv1
self.bn1 = nn.BatchNorm2d(64)
self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1) # conv2_x
self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2) # conv3_x
self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2) # conv4_x
self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2) # conv5_x
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.linear = nn.Linear(512 * block.expansion, num_classes)
def _make_layer(self, block, planes, num_blocks, stride):
strides = [stride] + [1] * (num_blocks - 1)
layers = []
for stride in strides:
layers.append(block(self.in_planes, planes, stride))
self.in_planes = planes * block.expansion
return nn.Sequential(*layers)
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
out = self.linear(x)
return out
def SE_ResNet18():
return SE_ResNet(BasicBlock, [2, 2, 2, 2])
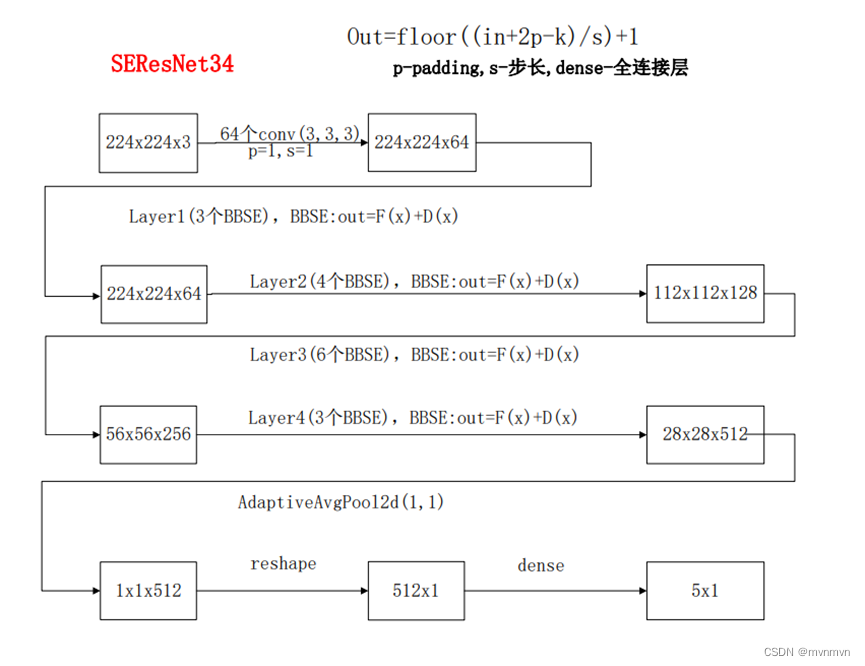
def SE_ResNet34():
return SE_ResNet(BasicBlock, [3, 4, 6, 3])
def SE_ResNet50():
return SE_ResNet(Bottleneck, [3, 4, 6, 3])
def SE_ResNet101():
return SE_ResNet(Bottleneck, [3, 4, 23, 3])
def SE_ResNet152():
return SE_ResNet(Bottleneck, [3, 8, 36, 3])
'''
if __name__ == '__main__':
model = SE_ResNet50()
print(model)
input = torch.randn(1, 3, 224, 224)
out = model(input)
print(out.shape)
# test()
'''
if __name__ == '__main__':
net = SE_ResNet50().cuda()
summary(net, (3, 224, 224))














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









