






扩展卡尔曼滤波EKF与无迹UKF的车辆状态估计模型
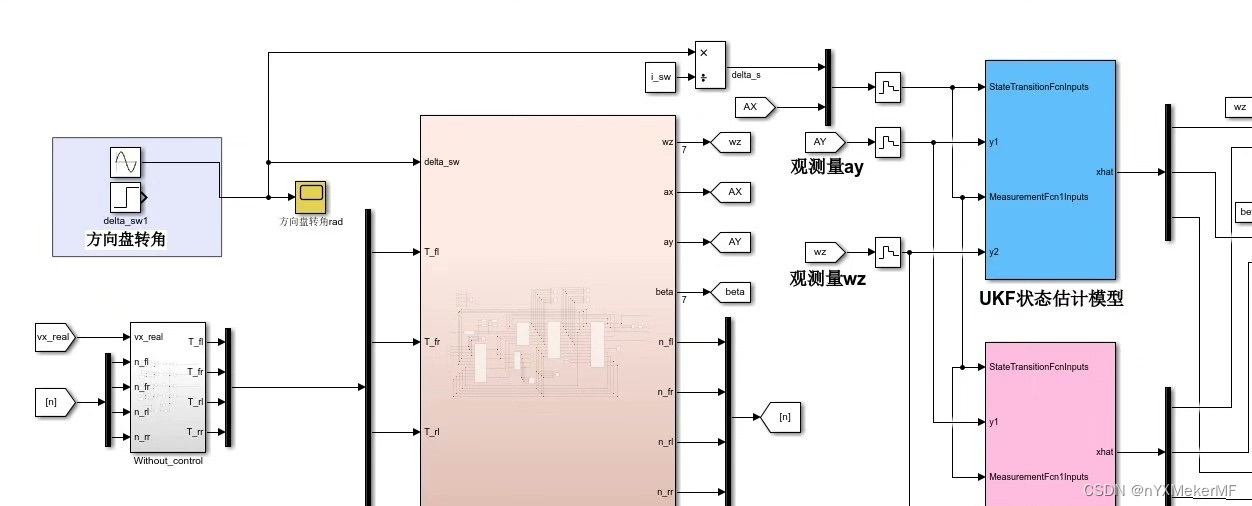
(1)整体模型:角阶跃输入+整车7自由度模型+UKF状态估计模型+附送EKF状态估计模型,针对于轮毂电机分布式驱动车辆,进行车速,质心侧偏角,横摆角速度估计。
(2)分别采用扩展卡尔曼滤波EKF与无迹卡尔曼滤波UKF对车辆进行状态估计
[1]模型输入:方向盘转角delta,车辆纵向加速度ax
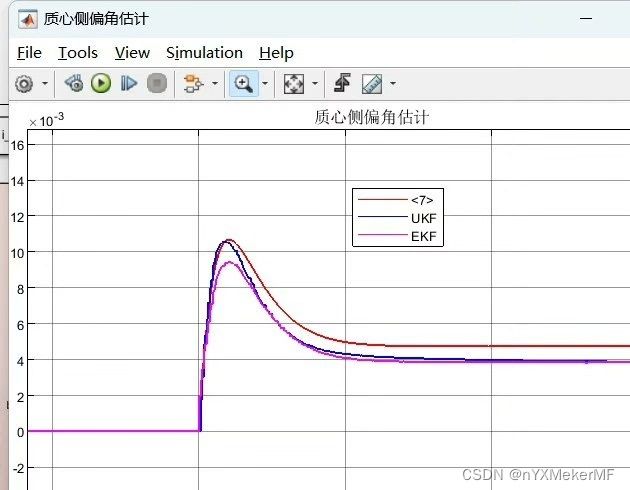
[2]模型输出:横摆角速度wz,纵向车速vx,质心侧偏角β
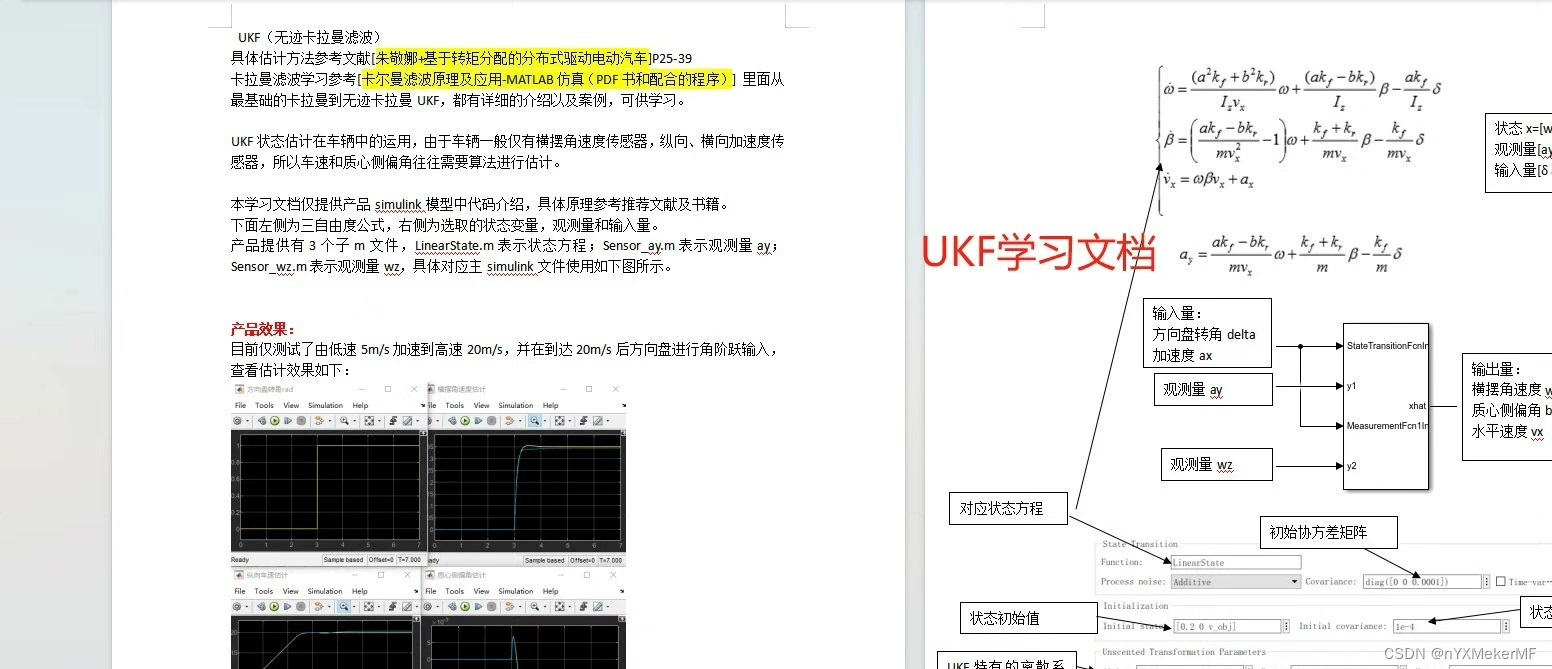
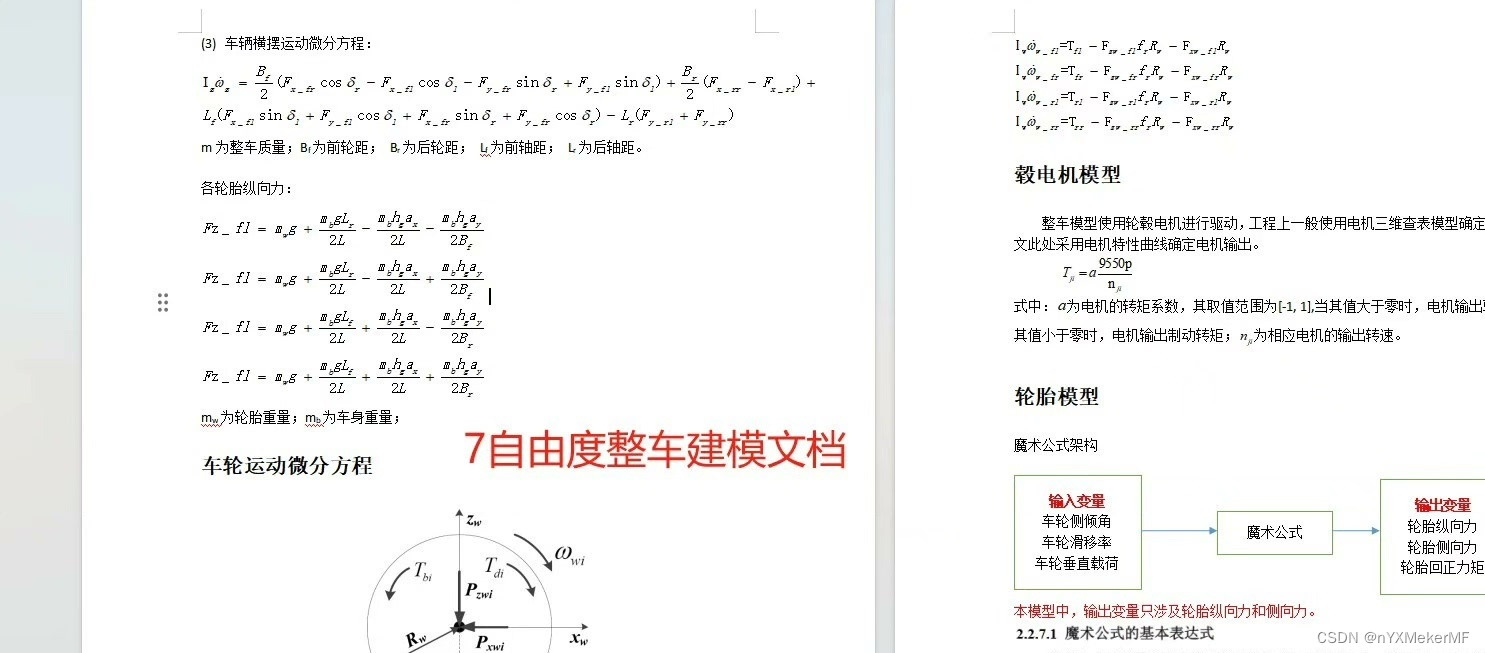
[3]文档资料:UKF学习文档+7自由度车辆建模文档+参考文献
模型资料:单独EKF状态估计模型、单独UKF状态估计模型、EKF+UKF状态估计模型




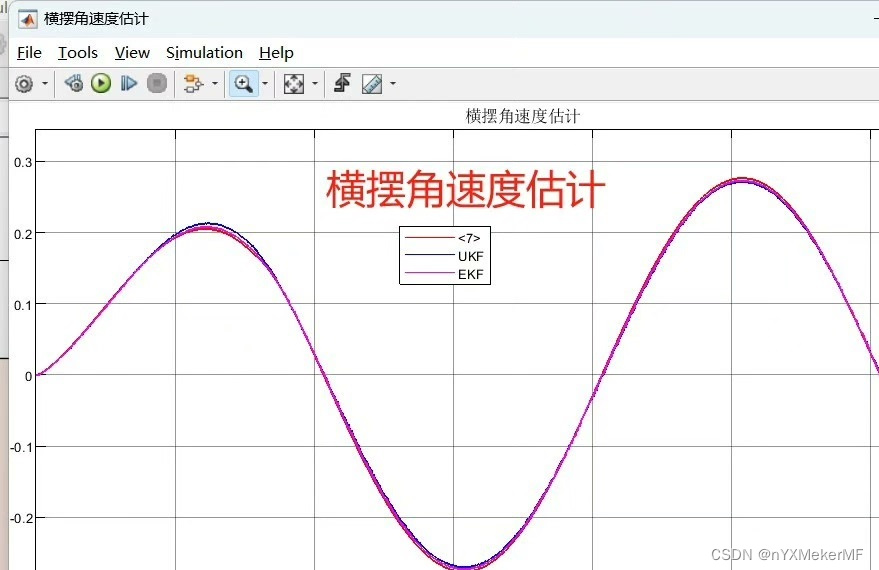
扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)是两种常用的状态估计模型,可以应用于车辆状态估计。本文将围绕角阶跃输入、整车7自由度模型以及UKF和EKF状态估计模型展开讨论,旨在实现对轮毂电机分布式驱动车辆的车速、质心侧偏角和横摆角速度的准确估计。
在车辆状态估计中,模型输入包括方向盘转角delta和车辆纵向加速度ax。模型输出则是横摆角速度wz、纵向车速vx和质心侧偏角β。为了实现状态估计,我们将使用UKF和EKF两个模型来分别对车辆进行估计。
首先,我们需要对车辆进行建模,这里采用7自由度车辆模型,该模型可以比较准确地描述车辆的运动状态。此外,我们还需要详细研究UKF和EKF的状态估计算法,以便在实际应用中能够正确使用这两种算法。为了更好地理解和应用这些模型和算法,我们还需要参考UKF学习文档、7自由度车辆建模文档以及其他相关的参考文献。
本文的核心内容是UKF和EKF状态估计模型的应用。首先,我们将介绍单独的EKF状态估计模型,详细介绍其原理和实现方法。然后,我们将介绍单独的UKF状态估计模型,同样详细阐述其原理和实现方法。最后,我们将介绍EKF和UKF状态估计模型的组合应用,分析其优势和不足之处。
通过对EKF和UKF状态估计模型进行分析和比较,我们可以发现它们的优势和适用场景。EKF算法相对简单,容易实现,但对于非线性问题的处理能力有限。UKF算法具有更好的非线性问题处理能力,但计算量较大。因此,在实际应用中,我们需要根据具体情况选择合适的状态估计算法。
总之,本文围绕扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)的车辆状态估计模型展开了讨论。通过对车辆的建模和对两种算法的研究,我们可以实现对轮毂电机分布式驱动车辆的车速、质心侧偏角和横摆角速度的准确估计。UKF和EKF状态估计模型的组合应用可以提高状态估计的精度和可靠性。在实际应用中,我们需要根据具体情况选择适合的算法,并合理利用文档资料和模型资料来指导和优化状态估计的过程。
相关代码,程序地址:http://lanzoup.cn/765868477276.html















 546
546











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









