






TPMS方案(SP35 SP37) 传感器 infineon篇
关于sp37无压力芯片目前已有方案
关于sp35传感器已经稳定出货,欢迎咨询
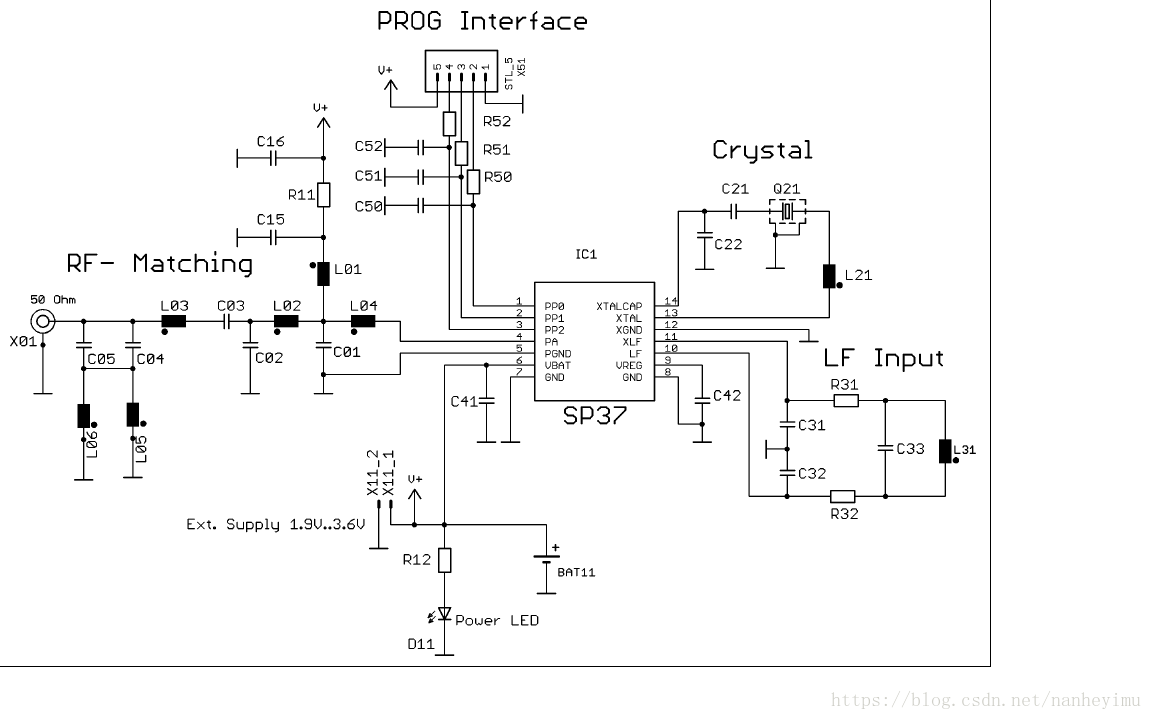
硬件原理图
软件说明:
协议
调制方式:FSK
频率: 433.920 MHz
频偏: 20.0 kHz
编码: Manchester
曼彻斯特类型: 10=One, 01=Zero
传输速率: 9.6 kbps
负载字节位起始: msb
前导码长度: 12(可根据需求调整长度,减少功耗)
前导码数据:0x00
同步码长度:1-byte
同步码: 0x01
数据长度:8
调整脉冲图:

数据字节:
Byte0 芯片识别号
Byte1 芯片识别号
Byte2 芯片识别号
Byte3 芯片识别号
Byte4 状态字节
Byte5 压力字节 y = 2x 单位kpa
Byte6 温度字节 y = x-50 单位C
Byte7 校验 前7个字节异或校验
状态机转换图:

状态机转换代码
switch(g_status)
{
case STATUS_INIT:
wake_time = 0x10;
if(pressure > 15)
{
g_status = STATUS_CHANGE;
g_tx_cnt = 0;
g_stable_cnt = 0;
send_flag = 1;
wake_time = 0x01;
}
break;
case STATUS_STABLE:
wake_time = 0x0a;
if(g_max_pressure - g_min_pressure >= 0x05) //10Kpa
{
reset_comprare(pressure);
g_status = STATUS_CHANGE;
g_tx_cnt = 0;
g_stable_cnt = 0;
send_flag = 1;
wake_time = 0x01;
}
if(acceleration_convert() > 0x2F)
{
g_status = STATUS_ROLL;
g_tx_cnt = 0;
g_stable_cnt = 0;
send_flag = 1;
wake_time = 0x05;
}
break;
case STATUS_CHANGE:
wake_time = 0x01;
if(g_max_pressure - g_min_pressure >= 0x05) //10Kpa
{
reset_comprare(pressure);
g_stable_cnt = 0;
send_flag = 1;
}
else
{
g_stable_cnt ++;
if(g_stable_cnt >= 0x05)
{
g_status = STATUS_STABLE;
g_stable_cnt = 0;
}
}
break;
case STATUS_ROLL:
wake_time = 0x06;
if(g_max_pressure - g_min_pressure >= 0x05)
{
reset_comprare(pressure);
g_status = 0x04;
g_tx_cnt = 0;
g_stable_cnt = 0;
send_flag = 1;
wake_time = 0x01;
}
g_tx_cnt++;
if(g_tx_cnt > 0x09)
{
g_tx_cnt = 0;
if(acceleration_convert() < 0x2F)
{
g_stable_cnt++;
if(g_stable_cnt > 0x04)
{
g_status = STATUS_STABLE;
}
}
send_flag = 1;
}
break;
case STATUS_ROLL_LEAK:
wake_time = 0x01;
if(g_max_pressure - g_min_pressure >= 0x05)
{
reset_comprare(pressure);
g_stable_cnt = 0;
send_flag = 1;
}
else
{
g_tx_cnt++;
if(g_tx_cnt >= 0x05)
{
g_tx_cnt = 0;
g_stable_cnt++;
if(g_stable_cnt > 0x02)
{
g_status = STATUS_ROLL;
g_tx_cnt = 0;
g_stable_cnt = 0;
}
send_flag = 1;
}
}
break;
default:
break;
}
数据发送:
调试方式:
采用的fsk调制方式发送数据,频率为433.92M.
调整RF发射时首先确定中心频率在误差范围之内,sp370通过调整电容来校正频率。
设定合理的频偏能让产品更稳定。
频偏设置越大信号带宽越大,对于晶振的要求不需要那么严格,反之设置越小带宽越小,带内干扰减少,信噪比提高,可以提高接收灵敏度。设置合理的频宽能够兼顾稳定和灵敏。
对于sp370可以通过调整外部电容来校正RF中心频率,对于使用的晶振的要求可以适当降低。
波特率:
波特率就是调制信号的频率,比如波特率是10000,实际上调制信号的频率就是5KHz,这里我们假设载波是100MHz。载波的周期是10ns,调制信号的周期是0.2ms。假如我们要发一个01信号,那么在0电平的时候信号频率就是100.005MHz,在0电平期间有0.2ms/10ns=2万个频率为100.005MHz 的周期信号,1电平的时候信号频率是99.995MHz,在1电平期间有0.2ms/10ns=2万个频率为99.995MHz 的周期信号。如果波特率是1000,那么在0电平的时候信号频率就是100.0005MHz,在0电平期间有0.2ms/10ns=20万个频率为100.005MHz 的周期信号,1电平的时候信号频率是99.9995MHz,在1电平期间有0.2ms/10ns=20万个频率为99.9995MHz 的周期信号。所以波特率越低,信号传输的时间越长。
传输过程中主要的误码率是在频谱切换的时候产生,波特率越低,频谱切换的越慢,单位时间的数据量越小,分辨率越高;而且波特率越低,信号带宽越窄,抗干扰杜越好。这些都可以提高接收灵敏度。
已实际应用于生产,完整方案文档正在整理持续更新。
技术沟通邮件:tpms_for_open@outlook.com 微信:virtaul_wealth

















 527
527

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









