






西门子S7-1500博图程序 例程,大型生产线案例,程序涵盖有机器人块,汽缸块,电机块,伺服块,可调用,扫码块,可学习参考,快速提升技能 ,编程使用的语言有SCL,LD,STL,GRAPH。 非常全面,
探索西门子 S7 - 1500 博图程序例程,开启大型生产线编程之旅
大家好呀,今天要给大家分享一个超棒的西门子 S7 - 1500 博图程序例程,这个例程来自大型生产线案例,对咱们搞自动化编程的小伙伴来说,简直是学习和提升技能的宝藏!
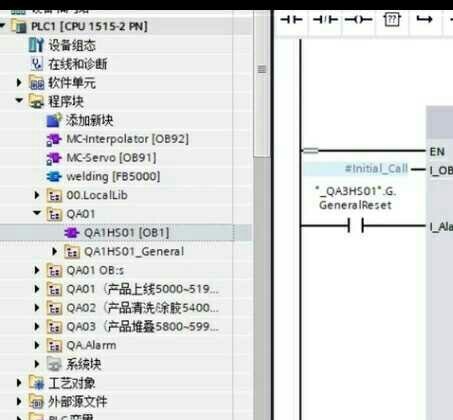
程序涵盖模块及可调用性
这个程序包含了多个重要的功能块,像机器人块、汽缸块、电机块、伺服块和扫码块等。这些块都具备可调用的特性,就好比你有了一套积木,需要什么功能,直接把对应的积木拿出来用就行。
代码示例与分析
咱们先看看简单的 SCL 语言代码示例,这里模拟一个电机启动的功能:
FUNCTION_BLOCK MotorControl
{ S7_Optimized_Access := 'TRUE' }
VERSION : 0.1
VAR_INPUT
Start : BOOL; // 启动信号
END_VAR
VAR_OUTPUT
MotorRun : BOOL; // 电机运行状态
END_VAR
VAR
Timer : TON; // 定时器
END_VAR
// 逻辑处理
Timer(IN := Start, PT := T#2S);
MotorRun := Timer.Q;
END_FUNCTION_BLOCK
分析一下这段代码哈。我们定义了一个名为 MotorControl 的功能块,有一个输入信号 Start 用来启动电机,还有一个输出信号 MotorRun 表示电机的运行状态。在功能块内部,我们使用了一个定时器 Timer,当 Start 信号为 TRUE 时,定时器开始计时,计时时间为 2 秒。当定时器计时完成(Timer.Q 为 TRUE),就把 MotorRun 置为 TRUE,表示电机开始运行。这样的代码结构清晰,把电机启动的逻辑封装在一个功能块里,方便在主程序中调用。
编程使用的语言
编程使用了多种语言,包括 SCL、LD、STL 和 GRAPH。每种语言都有其独特的优势。
SCL(结构化控制语言)
SCL 就像高级编程语言,语法和我们常见的 C 语言有点类似,适合处理复杂的逻辑运算和数据处理。比如上面的电机控制功能块,用 SCL 编写就很方便,能够清晰地表达逻辑关系。
LD(梯形图)
LD 是最直观的编程方式,就像画电路图一样。下面是一个简单的 LD 代码示例,实现一个汽缸的伸出和缩回控制:
Network 1: 汽缸伸出控制
|-----| |-----| |-----|
| Start | AND | M1.0 |--( )-- Q0.0
|-----| |-----| |-----|
Network 2: 汽缸缩回控制
|-----| |-----| |-----|
| Stop | AND | M1.1 |--( )-- Q0.1
|-----| |-----| |-----|
这里的 Start 和 Stop 是控制按钮信号,M1.0 和 M1.1 是中间变量,Q0.0 和 Q0.1 分别控制汽缸的伸出和缩回。通过梯形图,我们可以很直观地看到信号的流向和逻辑关系。
STL(语句表)
STL 是一种基于指令的编程方式,适合对程序执行效率要求较高的场景。不过它的可读性相对较差,需要对指令有一定的了解。例如下面的 STL 代码实现一个简单的逻辑与运算:
A I0.0
A I0.1
= Q0.2
这里的 A 是与指令,I0.0 和 I0.1 是输入信号,= Q0.2 是将结果输出到 Q0.2。
GRAPH(顺序功能图)
GRAPH 用于实现顺序控制,非常适合大型生产线中复杂的工艺流程。比如机器人的动作序列,就可以用 GRAPH 来清晰地表示。
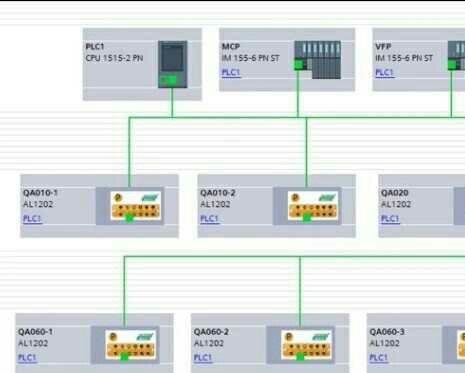
硬件配置
这个程序对应的硬件也很丰富,有远程 ET200、V90PN 三轴取料和相机等。远程 ET200 可以扩展输入输出点数,方便连接更多的传感器和执行器。V90PN 三轴取料则用于精确的物料抓取和搬运。相机可以用于视觉检测,确保产品质量。
程序版本要求
程序版本要求 TIA 15.1 及以上,大家在使用的时候要注意自己的版本是否符合要求。
总的来说,这个西门子 S7 - 1500 博图程序例程非常全面,很有参考价值。无论是初学者想要学习编程,还是有一定经验的工程师想要提升技能,都能从这个例程中获得很多有用的知识。大家不妨下载下来研究研究,说不定会有新的收获哦!
从产线实战聊S7-1500的模块化编程
拿到一套完整的大型生产线程序,就像解锁了工业自动化的武功秘籍。这次拆解的西门子S7-1500例程直接对标真实产线需求,硬件上整合了ET200远程站、V90PN伺服三轴取料、工业相机扫码,架构采用TIA Portal V15.1+版本。重点在于它把产线拆成了可复用的功能块——机器人块直接怼动作队列,气缸块玩转双控阀,伺服块处理闭环定位,这种模块化设计让调试效率直接翻倍。
扫码枪的SCL实现
比如扫码模块,用SCL写了个动态解析函数。核心是处理字符串中的特殊分隔符,这里用到了FIND函数定位分隔位置:
FUNCTION_BLOCK FB_ScanDecoder
VAR_INPUT
sRawData : STRING(255);
END_VAR
VAR_OUTPUT
sPartNo : STRING(20);
iQuantity : INT;
END_VAR
VAR
iSplitPos : INT;
END_VAR
iSplitPos := FIND(sRawData, '|');
IF iSplitPos > 0 THEN
sPartNo := LEFT(sRawData, iSplitPos-1);
iQuantity := STRING_TO_INT(MID(sRawData, iSplitPos+1, LEN(sRawData)-iSplitPos));
END_IF;
这段代码的巧妙之处在于处理不定长数据时直接操作字符串指针,避免用循环硬怼。实际应用中发现某些扫码枪会带干扰字符,建议在调用前加个TRIM预处理。
气缸动作的STL哲学
气缸控制最怕出现双线圈,这个例程用STL搞了个带互锁的FB块。注意看这段标志位的处理:
A #AutoMode
AN #ManualMode
= #EnableAuto //自动模式使能
A #EnableAuto
AN #CylinderForward
S #StartTimer //启动延时
A #StartTimer
L S5T#500MS
SD T1
A T1
= #CylinderForward //500ms后推气缸
STL的简洁在这里体现得淋漓尽致——用定时器直接绑定气缸动作,省去了中间变量。但要注意S5T#500MS这种时间格式在旧版本可能不兼容,需要根据PLC型号调整。
GRAPH实现的状态机
输送线逻辑最适合用GRAPH编写。比如这个三工位搬运流程:
GRAPH "Transfer_Sequence"
INIT_STEP S1:
TRANSITION T1 := (Sensor1 AND NOT Busy);
ACTION MoveToStation1();
STEP S2:
TRANSITION T2 := ProcessingDone;
ACTION StartProcessing();
STEP S3:
TRANSITION T3 := EjectComplete;
ACTION ReturnHome();
END_GRAPH
这种可视化编程对新手特别友好——状态转移条件直接写在框图里,调试时哪步卡住一目了然。不过实际应用中建议在ACTION里调用封装好的函数块,避免代码膨胀。
伺服轴的V90PN配置
硬件组态里V90PN的报文配置很有意思,例程用了111报文(速度+位置)。看这段伺服使能逻辑:
//梯形图段
| "Servo_Enable" "DriveReady"
|----| |----------------------------( )----
| "EnableCmd" "ErrorReset"
|----| |--------|/|-----------( )----
这里用常闭触点处理故障复位是重点,很多现场问题都出在没处理好使能链路上。调试时如果遇到伺服不启动,先查这个梯级的信号流就对了。
模块化设计的精髓
整个程序最值得学习的是接口标准化设计。比如机器人块FB_RobotMove的输入输出:
FUNCTION_BLOCK FB_RobotMove
VAR_INPUT
bExecute : BOOL; //触发信号
fTargetPos : REAL; //目标坐标
END_VAR
VAR_OUTPUT
bBusy : BOOL; //忙碌状态
bDone : BOOL; //完成信号
iErrorCode : INT; //错误码
END_VAR
所有功能块都遵循类似的接口规范,调用时就像搭积木。有个坑要注意:SCL块里用STATIC变量存储状态时,多个实例调用会互相污染数据,所以实例化时记得用INSTANCE声明专属存储区。
这套例程最狠的地方在于真实场景的打磨痕迹——比如扫码失败3次自动切人工工位,伺服零点丢失时的安全回退策略。建议拿到程序后先跑一遍交叉引用,看看报警处理怎么做的,绝对比看手册学得快。搞明白这些设计套路,下次做项目直接把这些块拖出来改参数,摸鱼时间又能多两小时(手动狗头)。
西门子S7-1500博图程序 例程,大型生产线案例,程序涵盖有机器人块,汽缸块,电机块,伺服块,可调用,扫码块,可学习参考,快速提升技能 ,编程使用的语言有SCL,LD,STL,GRAPH。
非常全面,很有参考价值。
硬件有远程ET200,V90PN三轴取料,相机等,程序版本TIA 15.1及以上。




















 1038
1038

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









