







 本文深入探讨Linux系统下I2C总线的初始化过程,包括i2c驱动的注册、初始化i2c适配器、创建i2c客户端设备等关键步骤。同时,详细介绍了针对特定芯片的I2C初始化函数和注册过程,以及I2C设备的注册流程。
本文深入探讨Linux系统下I2C总线的初始化过程,包括i2c驱动的注册、初始化i2c适配器、创建i2c客户端设备等关键步骤。同时,详细介绍了针对特定芯片的I2C初始化函数和注册过程,以及I2C设备的注册流程。
Linux下面有很多设备都使用到了i2c,所以看了一下i2c的驱动,虽然现在理解的也可能还是人力物力的,但至少还是有了一些基本的概念
参考:
http://blog.csdn.net/ylyuanlu/article/details/6705942
http://blog.csdn.net/hongjiujing/article/details/4098547
看下i2c初始化过程:
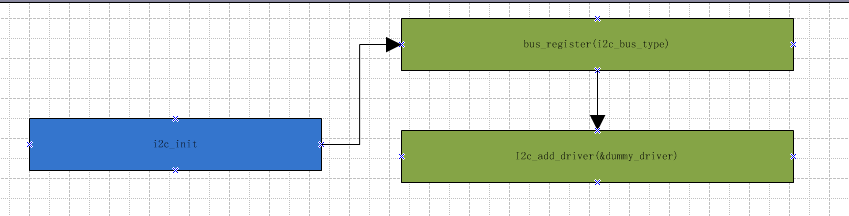
static int __init i2c_init(void)
{
int retval;
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_ENTER
retval = bus_register(&i2c_bus_type);
if (retval)
return retval;
#ifdef CONFIG_I2C_COMPAT
i2c_adapter_compat_class = class_compat_register("i2c-adapter");
if (!i2c_adapter_compat_class) {
retval = -ENOMEM;
goto bus_err;
}
#endif
printk("leaves before i2c_add_driver\n");
retval = i2c_add_driver(&dummy_driver);
printk("leaves after i2c_add_driver\n");
if (retval)
goto class_err;
#ifdef CONFIG_I2C_DEV_RK29
init_completion(&i2c_dev_complete);
#endif
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_EXIT
return 0;
class_err:
#ifdef CONFIG_I2C_COMPAT
class_compat_unregister(i2c_adapter_compat_class);
bus_err:
#endif
bus_unregister(&i2c_bus_type);
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_EXIT
return retval;
}
这个函数主要就是注册了一下i2c的bus
2、
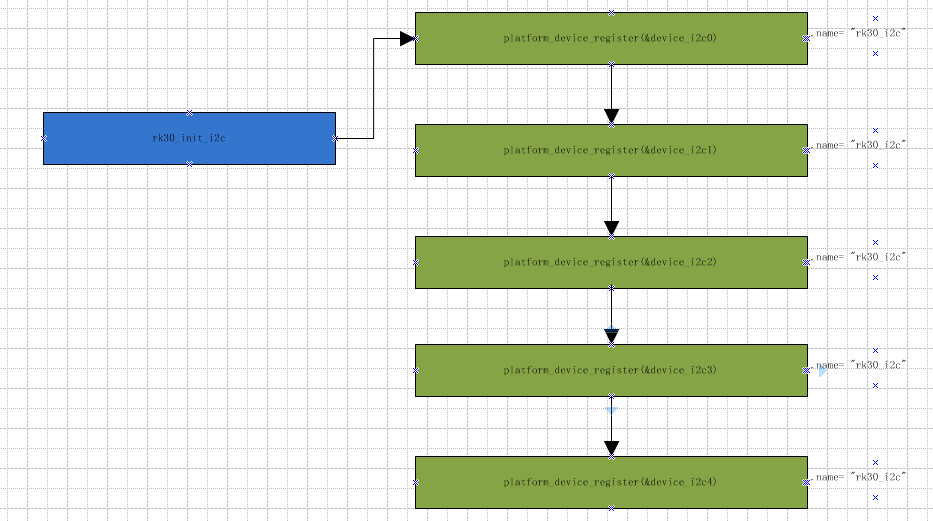
这个是针对RockChip芯片3066一款板子的初始化,注册了5个i2c设备
static void __init rk30_init_i2c(void)
{
printk("leaves Enter %s.\n", __FUNCTION__);
#ifdef CONFIG_I2C0_RK30
platform_device_register(&device_i2c0);
#endif
#ifdef CONFIG_I2C1_RK30
platform_device_register(&device_i2c1);
#endif
#ifdef CONFIG_I2C2_RK30
platform_device_register(&device_i2c2);
#endif
#ifdef CONFIG_I2C3_RK30
platform_device_register(&device_i2c3);
#endif
#ifdef CONFIG_I2C4_RK30
platform_device_register(&device_i2c4);
#endif
#ifdef CONFIG_I2C_GPIO_RK30
platform_device_register(&device_i2c_gpio);
#endif
printk("leaves Exit %s.\n", __FUNCTION__);
}
3、

这里注册 i2c的驱动
会匹配到上面注册的i2c设备,然后调用rk30_i2c_probe
static struct platform_driver rk30_i2c_driver = {
.probe = rk30_i2c_probe,
.remove = rk30_i2c_remove,
.driver = {
.owner = THIS_MODULE,
.name = "rk30_i2c",
.pm = rk30_DEV_PM_OPS,
},
};
static int __init i2c_adap_init(void)
{
int ret = -1;
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_RK30_FUNCTION_ENTER
ret = platform_driver_register(&rk30_i2c_driver);
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_RK30_FUNCTION_EXIT
return ret;
}
4、

rk30_i2c_probe的流程有点小复杂,我们一步步来看
/* rk30_i2c_probe
*
* called by the bus driver when a suitable device is found
*/
static int rk30_i2c_probe(struct platform_device *pdev)
{
struct rk30_i2c *i2c = NULL;
struct rk30_i2c_platform_data *pdata = NULL;
struct resource *res;
int ret;
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_RK30_FUNCTION_ENTER
pdata = pdev->dev.platform_data;
if (!pdata) {
dev_err(&pdev->dev, "no platform data\n");
return -EINVAL;
}
i2c = kzalloc(sizeof(struct rk30_i2c), GFP_KERNEL);
if (!i2c) {
dev_err(&pdev->dev, "no memory for state\n");
return -ENOMEM;
}
i2c->con_base = (void __iomem *)GRF_I2C_CON_BASE;
i2c_adap_sel(i2c, pdata->bus_num, pdata->adap_type);
if(pdata->io_init)
pdata->io_init();
if(pdata->check_idle){
i2c->check_idle = pdata->check_idle;
}
strlcpy(i2c->adap.name, "rk30_i2c", sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE; //初始化adapter
i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD;
i2c->tx_setup = TX_SETUP;
i2c->adap.retries = 2;
i2c->adap.timeout = msecs_to_jiffies(100);
spin_lock_init(&i2c->lock);
init_waitqueue_head(&i2c->wait);
mutex_init(&i2c->m_lock);
/* find the clock and enable it */
i2c->dev = &pdev->dev;
i2c->clk = clk_get(&pdev->dev, "i2c");
if (IS_ERR(i2c->clk)) {
dev_err(&pdev->dev, "cannot get clock\n");
ret = -ENOENT;
goto err_noclk;
}
i2c_dbg(&pdev->dev, "clock source %p\n", i2c->clk);
clk_enable(i2c->clk);
/* map the registers */
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);//获取平台资源(I2C)
if (res == NULL) {
dev_err(&pdev->dev, "cannot find IO resource\n");
ret = -ENOENT;
goto err_get_resource;
}
//http://blog.csdn.net/skyflying2012/article/details/8672011
i2c->ioarea = request_mem_region(res->start, resource_size(res),
pdev->name);//申请I/O内存
if (i2c->ioarea == NULL) {
dev_err(&pdev->dev, "cannot request IO\n");
ret = -ENXIO;
goto err_ioarea;
}
//用来将I/O内存资源的物理地址映射到核心虚地址空间。
i2c->regs = ioremap(res->start, resource_size(res));
if (i2c->regs == NULL) {
dev_err(&pdev->dev, "cannot map IO\n");
ret = -ENXIO;
goto err_ioremap;
}
i2c_dbg(&pdev->dev, "registers %p (%p, %p)\n",
i2c->regs, i2c->ioarea, res);
/* setup info block for the i2c core */
i2c->adap.algo_data = i2c;
i2c->adap.dev.parent = &pdev->dev;
i2c->adap.nr = pdata->bus_num;
printk("pdata->bus_num = %d.\n",pdata->bus_num);
if(pdata->adap_type == I2C_RK29_ADAP)
ret = i2c_add_rk29_adapter(&i2c->adap);
else // I2C_RK30_ADAP
ret = i2c_add_rk30_adapter(&i2c->adap);//添加i2c adapter
if (ret < 0) {
dev_err(&pdev->dev, "failed to add adapter\n");
goto err_add_adapter;
}
/* find the IRQ for this unit (note, this relies on the init call to
* ensure no current IRQs pending
*/
i2c->irq = ret = platform_get_irq(pdev, 0);//获取中断号
if (ret <= 0) {
dev_err(&pdev->dev, "cannot find IRQ\n");
goto err_get_irq;
}
ret = request_irq(i2c->irq, i2c->i2c_irq, IRQF_DISABLED,
dev_name(&pdev->dev), i2c);//注册中断服务函数
if (ret != 0) {
dev_err(&pdev->dev, "cannot claim IRQ %d\n", i2c->irq);
goto err_request_irq;
}
ret = rk30_i2c_register_cpufreq(i2c);
if (ret < 0) {
dev_err(&pdev->dev, "failed to register cpufreq notifier\n");
goto err_register_cpufreq;
}
platform_set_drvdata(pdev, i2c);
i2c->is_div_from_arm[i2c->adap.nr] = pdata->is_div_from_arm;
if(i2c->is_div_from_arm[i2c->adap.nr])
wake_lock_init(&i2c->idlelock[i2c->adap.nr], WAKE_LOCK_IDLE, dev_name(&pdev->dev));
i2c->i2c_init_hw(i2c, 100 * 1000);
dev_info(&pdev->dev, "%s: RK30 I2C adapter\n", dev_name(&i2c->adap.dev));
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_RK30_FUNCTION_EXIT
return 0;
//err_none:
// rk30_i2c_deregister_cpufreq(i2c);
err_register_cpufreq:
free_irq(i2c->irq, i2c);
err_request_irq:
err_get_irq:
i2c_del_adapter(&i2c->adap);
err_add_adapter:
iounmap(i2c->regs);
err_ioremap:
kfree(i2c->ioarea);
err_ioarea:
release_resource(i2c->ioarea);
err_get_resource:
clk_put(i2c->clk);
err_noclk:
kfree(i2c);
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_RK30_FUNCTION_EXIT
return ret;
}
这里主要的就是i2c_add_rk30_adapter
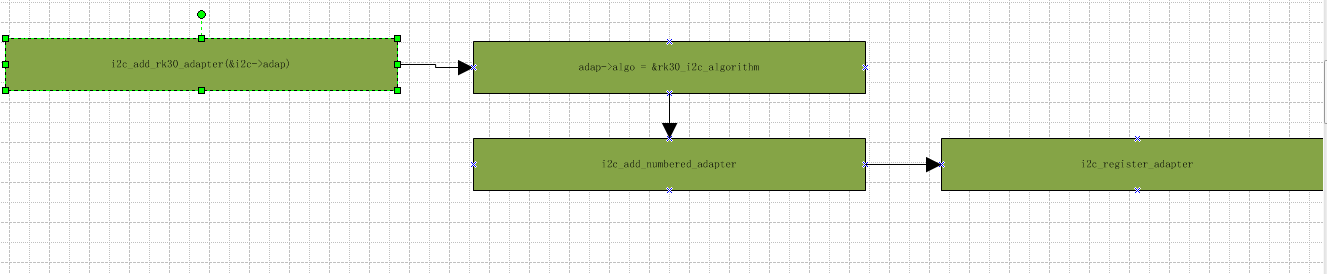
int i2c_add_rk30_adapter(struct i2c_adapter *adap)
{
int ret = 0;
struct rk30_i2c *i2c = (struct rk30_i2c *)adap->algo_data;
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_RK30_ADAPTER_FUNCTION_ENTER
adap->algo = &rk30_i2c_algorithm;
i2c->i2c_init_hw = &rk30_i2c_init_hw;
i2c->i2c_set_clk = &rk30_i2c_set_clk;
i2c->i2c_irq = &rk30_i2c_irq;
ret = i2c_add_numbered_adapter(adap);//注册I2C adapter驱动
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_RK30_ADAPTER_FUNCTION_EXIT
return ret;
}
这里赋值了一下传输算法
再来看一下i2c_register_adapter
static int i2c_register_adapter(struct i2c_adapter *adap)
{
int res = 0;
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_ENTER
/* Can't register until after driver model init */
if (unlikely(WARN_ON(!i2c_bus_type.p))) {
res = -EAGAIN;
goto out_list;
}
/* Sanity checks */
if (unlikely(adap->name[0] == '\0')) {
pr_err("i2c-core: Attempt to register an adapter with "
"no name!\n");
return -EINVAL;
}
if (unlikely(!adap->algo)) {
pr_err("i2c-core: Attempt to register adapter '%s' with "
"no algo!\n", adap->name);
return -EINVAL;
}
rt_mutex_init(&adap->bus_lock);
mutex_init(&adap->userspace_clients_lock);
INIT_LIST_HEAD(&adap->userspace_clients);
/* Set default timeout to 1 second if not already set */
if (adap->timeout == 0)
adap->timeout = HZ;
dev_set_name(&adap->dev, "i2c-%d", adap->nr);
printk("adap->dev.kobj.name = %s.\n", adap->dev.kobj.name);
adap->dev.bus = &i2c_bus_type;
adap->dev.type = &i2c_adapter_type;
printk("before device_register.\n");
res = device_register(&adap->dev);
printk("after device_register.\n");
if (res)
goto out_list;
dev_dbg(&adap->dev, "adapter [%s] registered\n", adap->name);
#ifdef CONFIG_I2C_COMPAT
res = class_compat_create_link(i2c_adapter_compat_class, &adap->dev,
adap->dev.parent);
if (res)
dev_warn(&adap->dev,
"Failed to create compatibility class link\n");
#endif
printk("__i2c_first_dynamic_bus_num = %d.\n", __i2c_first_dynamic_bus_num);
/* create pre-declared device nodes */
if (adap->nr < __i2c_first_dynamic_bus_num)
i2c_scan_static_board_info(adap);
/* Notify drivers */
mutex_lock(&core_lock);
//遍历该总线上所有的driver,执行一次__process_new_adapter
bus_for_each_drv(&i2c_bus_type, NULL, adap, __process_new_adapter);
mutex_unlock(&core_lock);
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_EXIT
return 0;
out_list:
mutex_lock(&core_lock);
idr_remove(&i2c_adapter_idr, adap->nr);
mutex_unlock(&core_lock);
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_EXIT
return res;
}
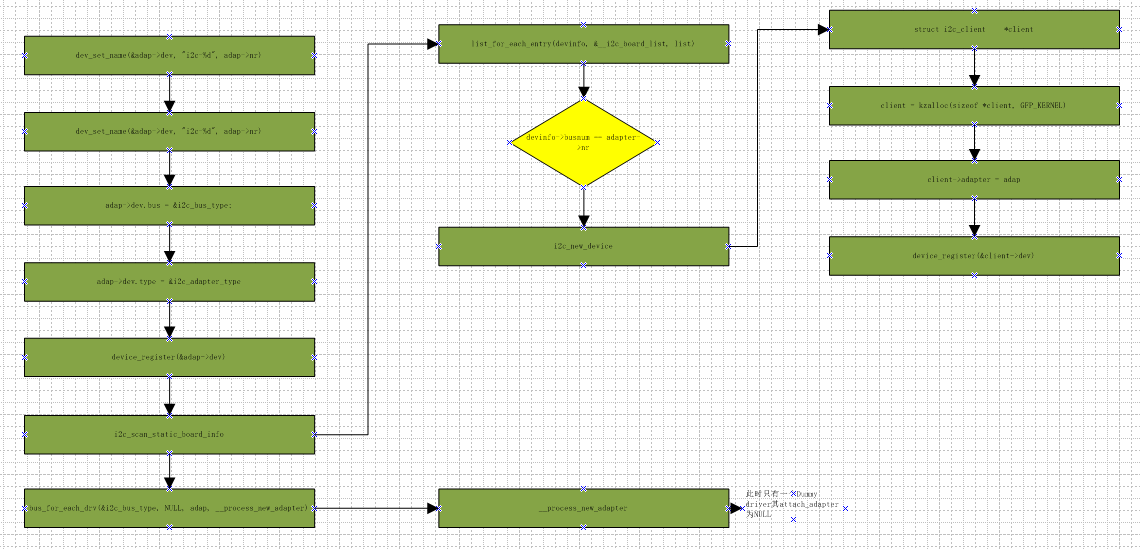
i2c_register_adapter主要做了4件事
1、 继续adap初始化
2、 注册adap设备
3、 遍历I2C设备链表,并创建链表上相应总线的设备
4、 遍历该总线上所有的driver,执行一次__process_new_adapter
我们看一下遍历i2c链表过程
//函数中遍历I2C设备链表__i2c_board_list,设备的总线号和adapter的总线号相等,(属于该总线的)
//则使用函数i2c_new_device()创建该设备。
static void i2c_scan_static_board_info(struct i2c_adapter *adapter)//
{
struct i2c_devinfo *devinfo;
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_ENTER
down_read(&__i2c_board_lock);
list_for_each_entry(devinfo, &__i2c_board_list, list) {
if (devinfo->busnum == adapter->nr
&& !i2c_new_device(adapter,
&devinfo->board_info))
dev_err(&adapter->dev,
"Can't create device at 0x%02x\n",
devinfo->board_info.addr);
}
up_read(&__i2c_board_lock);
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_EXIT
}
这里调用i2c_new_device创建相应的i2c client,一个i2c_client结构相当于i2c总线上的一个设备
struct i2c_client *
i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info)
{
struct i2c_client *client;
int status;
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_ENTER
client = kzalloc(sizeof *client, GFP_KERNEL);
if (!client)
return NULL;
client->adapter = adap;
client->dev.platform_data = info->platform_data;
if (info->archdata)
client->dev.archdata = *info->archdata;
client->flags = info->flags;
client->addr = info->addr; /* 取得I2C器件地址 */
client->irq = info->irq;
client->udelay = info->udelay; // add by kfx
strlcpy(client->name, info->type, sizeof(client->name));
/* Check for address validity */
status = i2c_check_client_addr_validity(client);
if (status) {
dev_err(&adap->dev, "Invalid %d-bit I2C address 0x%02hx\n",
client->flags & I2C_CLIENT_TEN ? 10 : 7, client->addr);
goto out_err_silent;
}
/* Check for address business */
#if 0
status = i2c_check_addr_busy(adap, client->addr);
if (status)
goto out_err;
#else
/* ddl@rock-chips.com : Devices which have some i2c addr can work in same i2c bus,
if devices havn't work at the same time.*/
status = i2c_check_addr_ex(adap, client->addr);
if (status != 0)
dev_err(&adap->dev, "%d i2c clients have been registered at 0x%02x",
status, client->addr);
#endif
client->dev.parent = &client->adapter->dev;
client->dev.bus = &i2c_bus_type;
client->dev.type = &i2c_client_type;
client->dev.of_node = info->of_node;
/* ddl@rock-chips.com : Devices which have some i2c addr can work in same i2c bus,
if devices havn't work at the same time.*/
#if 0
dev_set_name(&client->dev, "%d-%04x", i2c_adapter_id(adap),
client->addr);
#else
if (status == 0)
dev_set_name(&client->dev, "%d-%04x", i2c_adapter_id(adap),
client->addr);
else
dev_set_name(&client->dev, "%d-%04x-%01x", i2c_adapter_id(adap),
client->addr,status);
#endif
printk("device_register before \n");
status = device_register(&client->dev);
printk("device_register after \n");
if (status)
goto out_err;
printk( "client [%s] registered with bus id %s\n",
client->name, dev_name(&client->dev));
LEAVES_DEBUG_FLAG_DRIVER_I2c_BUSSES_I2c_I2c_CORE_FUNCTION_EXIT
return client;
out_err:
dev_err(&adap->dev, "Failed to register i2c client %s at 0x%02x "
"(%d)\n", client->name, client->addr, status);
out_err_silent:
kfree(client);
return NULL;
}
这里调用了device_register注册了相应的i2c设备,如我们后面讲到的陀螺仪在i2c0总线上定义的
static struct i2c_board_info __initdata i2c0_info[] = {
…
#if defined (CONFIG_GYRO_L3G4200D)
{
.type = "l3g4200d_gryo",
.addr = 0x69,
.flags = 0,
.irq = L3G4200D_INT_PIN,
.platform_data = &l3g4200d_info,
},
…
}
这里进行了陀螺设备的注册
__process_new_adapter会调用i2c_do_add_adapter,但此时只有一个dummy_driver,而且他没有定义attach_adapter,所以其实什么事也没有做
这样,i2c设备初始化就已经完成了,就可以等待注册i2c驱动

















 182
182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









