






本文为作者学习笔记
欢迎交流讨论,喜欢的话点个赞吧
欢迎去看我的主页: NicholasYe’s Hompage.
L298N电机驱动
const int negR=4;//右负极
const int posR=5;//右正极
const int negL=6;//左负极
const int posL=7;//左正极
const int pwmR=9;//右轮pwm
const int pwmL=10;//左轮pwm
//设置初值
void setup()
{
pinMode(posR,OUTPUT);//引脚4
pinMode(negR,OUTPUT);//引脚5
pinMode(posL,OUTPUT);//引脚6
pinMode(negL,OUTPUT);//引脚7
pinMode(pwmR,OUTPUT);//引脚9
pinMode(negL,OUTPUT);//引脚10
}
//主循环
void loop()
{
forward(200,200);
delay(2000);
pause(0,0);
delay(2000);
back(200,200);
delay(2000);
pause(0,0);
delay(2000);
}
//前进函数
void forward(byte RmotorSpeed,byte LmotorSpeed)
{
analogWrite(pwmR,RmotorSpeed);//右轮转速
analogWrite(pwmL,LmotorSpeed);//左轮转速
digitalWrite(posR,HIGH);//右轮正转
digitalWrite(negR,LOW);
digitalWrite(posL,LOW);//左轮反转
digitalWrite(negL,HIGH);
}
//后退函数
void back(byte RmotorSpeed,byte LmotorSpeed)
{
analogWrite(pwmR,RmotorSpeed);//右轮转速
analogWrite(pwmL,LmotorSpeed);//左轮转速
digitalWrite(posR,LOW);//右轮反转
digitalWrite(negR,HIGH);
digitalWrite(posL,HIGH);//左轮正转
digitalWrite(negL,LOW);
}
//停止函数
void pause(byte RmotorSpeed,byte LmotorSpeed)
{
analogWrite(pwmR,RmotorSpeed);//右轮转速
analogWrite(pwmL,LmotorSpeed);//左轮转速
digitalWrite(posR,LOW);//右轮停止
digitalWrite(negR,LOW);
digitalWrite(posL,LOW);//左轮停止
digitalWrite(negL,LOW);
}
//右转
void right(byte RmotorSpeed,byte LmotorSpeed)
{
analogWrite(pwmR,RmotorSpeed);//右轮转速
analogWrite(pwmL,LmotorSpeed);//左轮转速
digitalWrite(posR,LOW);//右轮停止
digitalWrite(negR,LOW);
digitalWrite(posL,LOW);//左轮反转
digitalWrite(negL,HIGH);
}
//左转
void left(byte RmotorSpeed,byte LmotorSpeed)
{
analogWrite(pwmR,RmotorSpeed);//右轮转速
analogWrite(pwmL,LmotorSpeed);//左轮转速
digitalWrite(posR,HIGH);//右轮正转
digitalWrite(negR,LOW);
digitalWrite(posL,LOW);//左轮停止
digitalWrite(negL,LOW);
}
超声波传感器
const int trig =4;//引脚
const int echo =5;
float distance;//返回数值
void setup()
{
Serial.begin(9600);//串口调试
pinMode(trig,OUTPUT);//针脚输出
pinMode(echo,INPUT);//针脚输入
}
void loop()
{
//向引脚发送10us的高电平
digitalWrite(trig,LOW);
delayMicroseconds(2);
digitalWrite(trig,HIGH);
delayMicroseconds(10);
digitalWrite(trig,LOW);
//测算距离
distance = (pulseIn(echo,HIGH)/58.00);
//串口打印
Serial.print(distance);
Serial.print("cm");
Serial.println();
//延迟1000ms
delay(1000);
}
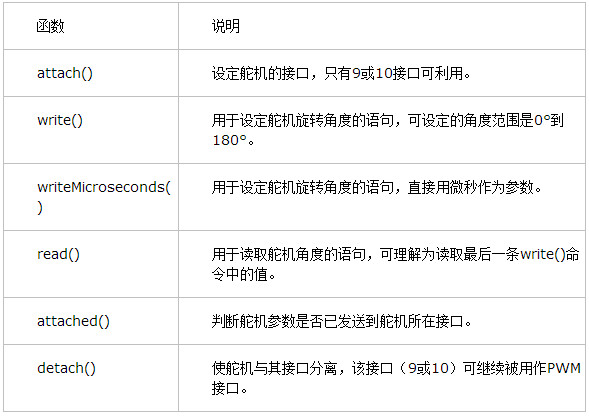
舵机
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
int pos = 0; // 角度存储变量
void setup()
{
myservo.attach(9); // 控制线连接数字9
}
void loop()
{
for (pos = 0; pos <= 180; pos++) { // 0°到180°
// in steps of 1 degree
myservo.write(pos); // 舵机角度写入
delay(5); // 等待转动到指定角度
}
for (pos = 180; pos >= 0; pos--) { // 从180°到0°
myservo.write(pos); // 舵机角度写入
delay(5); // 等待转动到指定角度
}
}
舵机红色线接开发板5V,棕色线接开发板GND,橙色信号线接开发板数字引脚
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
int pos = 180; // 角度存储变量
void setup()
{
myservo.attach(7); // 控制线连接数字7
myservo.write(90);
delay(2000);
}
void loop()
{
pos=pos-180;
myservo.write(pos);
delay(3000);
pos=pos+360;
myservo.write(pos);
delay(3000);
pos=pos-180;
myservo.write(pos);
delay(3000);
}
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
int pos = 180; // 角度存储变量
void setup()
{
myservo.attach(9); // 控制线连接数字7
myservo.write(0);
delay(2000);
}
void loop()
{
myservo.write(0);
delay(1500);
myservo.write(200);
delay(1500);
myservo.write(0);
delay(1500);
myservo.write(200);
delay(1500);
myservo.write(0);
delay(1500);
}

光电传感器
int light1=3;//光电传感器
int v_light1;//光电传感器返回数值
void setup()
{
pinMode(LED_BUILTIN, OUTPUT);//LED闪烁
Serial.begin(9600);
}
//主循环
void loop()
{
light_test();
}
//传感器检测
void light_test()
{
//读取光电传感器数值
int value=0;
v_light1=digitalRead(light1);
value=v_light1;
Serial.print(value);
Serial.println();
//条件判断
if(value==0)
{
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
}
else
{
digitalWrite(LED_BUILTIN, LOW); // turn the LED on (HIGH is the voltage level)
}
}
棕色正极蓝色负极黑色信号输出
灯亮(距离近)时digital.read()为0(LOW)
灯灭(距离远)时digital.read()为1(HIGH)
HIGH和LOW是系统常量,定义分别是1(高)0(低),还有,=是赋值,==是判断
灰度传感器
const int gray1 = A1;//灰度传感器GR1
int graynum1;//灰度传感器返回数值
int* level = NULL;//灰度传感器数值的指针
// the setup function runs once when you press reset or power the board
void setup()
{
Serial.begin(9600);//开启9600端口
Serial.println("Senesor:");
pinMode(gray1, INPUT);//灰度传感器GR4
}
// the loop function runs over and over again until power down or reset
void loop()
{
Gray();
Serial.print(*level);
Serial.println();
}
//灰度传感器Gray(指针写法)
int Gray()
{
graynum4 = analogRead(4);
level = &graynum4;
}
灰度传感器连续快速返回数值,因此,在不是很稳定的情况下,建议配合快速排序函数取中值一同使用
const int gray1 = A0;//灰度传感器GR1(车左前)
int graynum1;//灰度传感器返回数值
int* level1 = NULL;//存储灰度传感器数值graynum的指针
void setup()
{
Serial.begin(9600);
pinMode(gray1, INPUT);//灰度传感器GR1
pinMode(LED_BUILTIN, OUTPUT);//LED闪烁
}
void loop()
{
int gray_level1[21] = {0};
for (int m = 0; m < 21; m++)
{
Gray1();
gray_level1[m] = *level1;
}
int median1 = quickSort(gray_level1, 0, 20);
Serial.print(median1);
Serial.println();
}
//取中值函数
int quickSortPartition(int s[], int l, int r) {
//Swap(s[l], s[(l + r) / 2]); //若以中间数为基准,则先将中间的这个数和第一个数交换即可
int i = l, j = r, x = s[l]; //将最左元素记录到x中
while (i < j)
{
// 从右向左找第一个<x的数
// 无需考虑下标越界
while (i < j && s[j] >= x)
j--;
if (i < j)
s[i++] = s[j]; //直接替换掉最左元素(已在x中存有备份)
// 从左向右找第一个>x的数
while (i < j && s[i] <= x)
i++;
if (i < j)
//替换掉最右元素(已在最左元素中有备份)
//最左元素一定被覆盖过,若没有,则表明右侧所有元素都>x,那么算法将终止
s[j--] = s[i];
}
s[i] = x; //i的位置放了x,所以其左侧都小于x,右侧y都大于x
return i;
}
int quickSort(int s[], int l, int r)
{
//数组左界<右界才有意义,否则说明都已排好,直接返回即可
if (l >= r) {
return s[10];
}
// 划分,返回基准点位置
int i = quickSortPartition(s, l, r);
// 递归处理左右两部分,i处为分界点,不用管i了
quickSort(s, l, i - 1);
quickSort(s, i + 1, r);
return s[10];
}
//灰度传感器Gray1
int Gray1()
{
graynum1 = analogRead(0);
level1 = &graynum1;
return graynum1;
}
红外ToF传感器
/*
This example takes range measurements with the VL53L1X and displays additional
details (status and signal/ambient rates) for each measurement, which can help
you determine whether the sensor is operating normally and the reported range is
valid. The range is in units of mm, and the rates are in units of MCPS (mega
counts per second).
*/
#include <Wire.h>
#include <VL53L1X.h>
VL53L1X sensor;
void setup()
{
Serial.begin(115200);
Wire.begin();
Wire.setClock(400000); // use 400 kHz I2C
sensor.setTimeout(500);
if (!sensor.init())
{
Serial.println("Failed to detect and initialize sensor!");
while (1);
}
// Use long distance mode and allow up to 50000 us (50 ms) for a measurement.
// You can change these settings to adjust the performance of the sensor, but
// the minimum timing budget is 20 ms for short distance mode and 33 ms for
// medium and long distance modes. See the VL53L1X datasheet for more
// information on range and timing limits.
sensor.setDistanceMode(VL53L1X::Long);
sensor.setMeasurementTimingBudget(50000);
// Start continuous readings at a rate of one measurement every 50 ms (the
// inter-measurement period). This period should be at least as long as the
// timing budget.
sensor.startContinuous(50);
}
void loop()
{
sensor.read();
Serial.print("range: ");
Serial.print(sensor.ranging_data.range_mm);
Serial.print("\tstatus: ");
Serial.print(VL53L1X::rangeStatusToString(sensor.ranging_data.range_status));
Serial.print("\tpeak signal: ");
Serial.print(sensor.ranging_data.peak_signal_count_rate_MCPS);
Serial.print("\tambient: ");
Serial.print(sensor.ranging_data.ambient_count_rate_MCPS);
Serial.println();
}
串口函数
void setup()
{
Serial.begin(9600);
Serial.println("Senesor:");
}
void loop()
{
Serial.print();
Serial.println();
}
若有需要同时输出多个数值:
//以灰度传感器为例
Serial.print(XHEADER + analogRead(xpin) + TAB);
Serial.print(YHEADER + analogRead(ypin) + TAB);
Serial.print(ZHEADER + analogRead(zpin));
Serial.println();
delay(200);
或者
Serial.print(((float)x - zero_G)/scale);
Serial.print("\t");
Serial.print(((float)y - zero_G)/scale);
Serial.print("\t");
Serial.print(((float)z - zero_G)/scale);
Serial.print("\n");
蓝牙模块
#include <SoftwareSerial.h>
SoftwareSerial mySerial(10, 11); //定义RX和TX接口
void setup() {
//开启USB连线的串口通信
Serial.begin(57600);
Serial.println("Goodnight moon!");
//开启蓝牙模块的串口通信
mySerial.begin(4800);
mySerial.println("Hello, world?");
}
void loop() {
//mySerial.available()检测蓝牙模块是否正常工作
//mySerial.read()读取蓝牙模块传回的数据
if (mySerial.available())
{
//将蓝牙模块传回的数值打印在USB连接的电脑串口上
Serial.write(mySerial.read());
}
}
请在转载文章过程中明确标注文章出处!尊重原创,尊重知识产权,谢谢!
















 274
274











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









