






 文章研究了智能装配车间AGV物流配送与调度问题,通过仿真软件对AGV数量和运载能力进行优化配置,以提高设备利用率和生产效率。研究表明,AGV数量对设备平均利用率有显著影响,而运输能力影响不显著。优化方案提出选择适量的AGV和适当运载能力,以平衡成本和生产效益。
文章研究了智能装配车间AGV物流配送与调度问题,通过仿真软件对AGV数量和运载能力进行优化配置,以提高设备利用率和生产效率。研究表明,AGV数量对设备平均利用率有显著影响,而运输能力影响不显著。优化方案提出选择适量的AGV和适当运载能力,以平衡成本和生产效益。
导语
大家好,我是智能仓储物流技术研习社的社长,你的老朋友,老K。行业群
精准找到/物流装备专业厂商人脉/--->甲方请进
作者:武汉科技大学-郭世超等
来源:《机床与液压》
随着智能制造技术的发展,智能制造车间的自动生产线和仓库管理系统是实现智能制造的必要条件。自动引导车作为智能车间和物流系统中重要的物流运输设备,得到了广泛的应用。
AGV的物流配送能力直接影响着智能制造车间的生产效率,因此如何配置配送小车的能力,使得车间的设备利用率、AGV利用率和小车总行走路线相对最优,是智能车间生产的设计环节。
某企业新能源电池包是由电芯模组串联组成,电池包内设有电池管理系统、电池热管理系统,可有效保护电池包安全。其智能装配车间包含若干装配工序,每道工序加工完成后自动流入下一道工序,智能装配车间从立体仓库到自动化产线,实现多系统集成、数据对接以及生产情况反馈看板的智能化生产。
在实际试产中发现,新能源电池包装配车间的AGV物流配送与实际生产调度脱节,致使智能车间的生产效率受限,无法充分发挥智能设备的加工能力。因此,针对该企业特点,提出切实可行的AGV配送与调度方法是提高设备利用率和生产效率的有效途径。
该智能装配车间是典型离散事件系统,面向智能对象,SIMIO仿真软件可实现二维模型与三维模型的相互转换,对整个生产过程事件进行模拟,直观地观察和了解系统。
目前,智能车间投产前十分重视设计方案的产能评估,可通过仿真模型构建、生产过程仿真优化,统计分析设计方案的生产能力与风险性能,为管理者提供决策依据,以期降低生产成本,提高生产效率。
因此,本文以某新能源企业即将正式投入生产的智能装配车间为例进行研究。运用SIMIO仿真软件,设置AGV的数量和AGV的运载能力等,以设备平均利用率、AGV平均利用率和AGV行走路线总长度为目标,采用方差分析和响应优化的方法,得出该企业智能装配车间物流配送的优化方案。
一、问题描述
某新能源企业即将正式投入使用的智能装配车间包括SCADA(数据采集与监视控制)系统和WMS(仓库管理系统)。SCADA系统负责自动化产线的控制和产线生产数据的采集,WMS负责原材料立体仓库和AGV的调度,系统间通过信息交互,实现产线的自动化生产。图1所示为该企业智能装配车间简图。
智能装配车间由4个工作中心组成,分别为基体工作中心、模组工作中心、Pack工作中心、上箱体工作中心。车间布局以Pack工作中心为主线,以基体、模组、上箱体工作中心为支线。为能够清晰地表示各个工作中心之间的生产关系,图1只展示了每个工作中心首尾2个工序以及汇合点工序(矩形表示汇合点工序)。
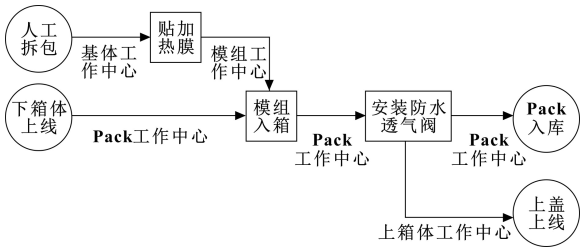
图1智能装配车间简图
企业智能装配车间的具体布局如图2所示。
基体工作中心的工序用嫣红色标注,包括电芯上线、端板等离子清洗、电芯堆叠等工序;模组工作中心的工序用紫色标注,包括贴加热膜、安装钢扎带、模组烘烤、模组搬运等工序;上箱体工作中心的工序用洋红色标注,包括上盖上线、安装防水透气阀等工序;
Pack工作中心的工序用浅绿色标注,包括下箱体上线、安装MSD插座、安装加热输入输出插件、安装低压输入输出插件、安装总负输出插座、安装总正输出插座、整理线束、连接高压铜排、模组入箱、连接模组加热线1及测试、拧紧CSC/尾侧压条/预装模组螺栓、安装防碰撞保护板、Pack烘烤、贴FPC、安装整理低压线束、安装总正/负盖板、Pack入成品库等工序;
其中,模组、Pack烘烤工位为模组、Pack工作中心公用。
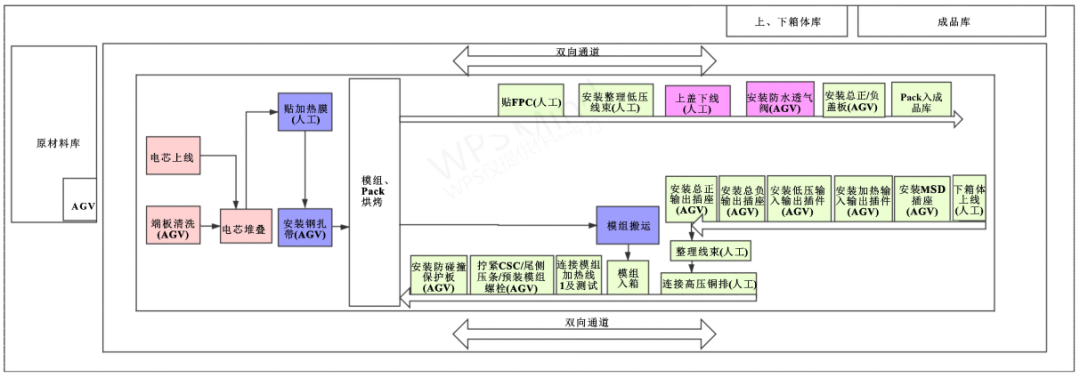
图2智能装配车间布局
智能装配车间是面向订单生产的生产模式,订单到达具有随机性,为尽量减少因物料短缺出现停工,AGV小车无须满载再进行配送。
当产线开始生产时,原材料由AGV小车通过产线两边的双向通道配送到产线线边仓进行装配,当线边仓的料框为空时,设备把空料框移出使用位置,SCADA系统触发叫料信号给WMS,WMS判断AGV停车场是否有空闲,若有空闲,AGV调用运输物料(按照整箱配送)到指定工位线边仓,若没有空闲的AGV时,该配送任务在系统中等待,当有空闲AGV后再次调用。
由于装配工序复杂,该企业的智能装配车间生产线比较长,AGV配送的物料按照整包数量配送,而各个物料单包数量不同,呼叫小车的时间无法确定。如何配置合理的AGV数量和AGV的运载能力,使物料能够准时送到产线,不影响产线生产,使加工设备利用率最高,是需要解决的问题。
二、AGV物流配送仿真模型构建与运行
2.1 模型假设
对该企业的智能装配车间AGV调度问题作以下假设:
(1)同一时间点,一台AGV只能执行一个任务且只运输同一种物料;
(2)智能车间设备布局以及AGV的行走路线已知;
(3)每辆AGV属性相同,均以固定速度运行,任务结束后返回停车场;
(4)AGV和车间设备连续运行,不会发生故障,运行过程中不会发生碰撞;
(5)各工位之间的距离已知;
(6)人工配送的工序满足智能装配车间的生产物料要求。
2.2 仿真模型构建
利用SIMIO软件搭建智能车间的仿真模型。SIMIO软件提供了丰富的建模概念和特色,通过建模能得到一个满足视觉效果和数据需求的智能车间。
SIMIO是基于面向对象的方法论,在标准对象库、目标实体和标准执行过程基础上,使用者可以制定实验,增删、修改过程以实现想要得到的功能。
根据图2所示的智能装配车间布局,在SIMIO空间中建模。拖动SIMIO标准对象库(StandardObjectLibrary)13个Source至空间中,代表着需要AGV运输的物料、电芯上线以及下箱体上线的原材料库。在项目库(ProjectLibrary)中拖动13个实体(ModelEntity)到建模空间中,代表13种物料。
拖动12个Combiner,分别代表电芯堆叠、安装钢扎带、安装MSD插座、安装加热输入输出插件、安装低压输入输出插件、安装总负输出插座、安装总正输出插座、模组入箱、拧紧CSC/尾侧压条/预装模组螺栓、安装防碰撞保护板、安装防水透气阀、安装总正/负盖板等工序设备。
拖动11个Server,分别代表端板等离子清洗、贴加热膜、模组烘烤、模组搬运、整理线束、连接高压铜排、连接模组加热线1及测试、Pack烘烤、贴FPC、安装整理低压线束、上盖上线等工序设备。拖动一个Vehicle模型到空间建模区,代表AGV,再拖一个BasicNode作为AGV的停车点。
在标准对象库中拖动一个Sink到建模区,代表成品离开生产线,进入成品库。
按照物料名称,修改每一个实体和原材料库(Source)的名字,且实体需要与原材料库对应,在Source的EntityType属性中修改各个物料的名称。
已知原材料库的物料配送时间间隔,端板上线、安装钢扎带等工序的物料以2个/min的速度到达,其他物料均以每个3 min的速度到达。
修改Source的最初到达时间的属性,根据电芯上线、端板上线、安装钢扎带、下箱体上线、安装MSD插座、安装加热输入输出插件、安装低压输入输出插件、安装总负输出插座、安装总正输出插座、拧紧CSC/尾侧压条/预装模组螺栓、安装防碰撞保护板、安装总正/负盖板、安装防水透气阀等工序所需物料的整包装数分别为4、24、26、6、30、150、100、24、24、8、96、140、400个,修改Source一次到达物料的数量。
修改Serv⁃er和Combiner的设备加工时间均为每个25min。根据单个电池包的物料用量在安装钢扎带工序为6个/包,其余工序均为1个/包,修改Combiner的BatchQuantity的数量关系。修改实体和小车在系统中的移动速度为0.5m/s。
设备之间用TimePath线连接,代表车间的传送线,设置时间为10s。
原材料库与设备之间用Path连接,代表AGV的行走路线,电芯上线、端板上线、安装钢扎带、下箱体上线、安装MSD插座、安装加热输入输出插件、安装低压输入输出插件、安装总负输出插座、安装总正输出插座、拧紧CSC/尾侧压条/预装模组螺栓、安装防碰撞保护板、安装防水透气阀、安装总正/负盖板等工序原材料库与设备之间的距离,分别为90、10、20、10、130、120、110、100、90、60、50、90、100m。
AGV在车间设备两边的双向通道中行走,构建的AGV物流仿真模型如图3所示。
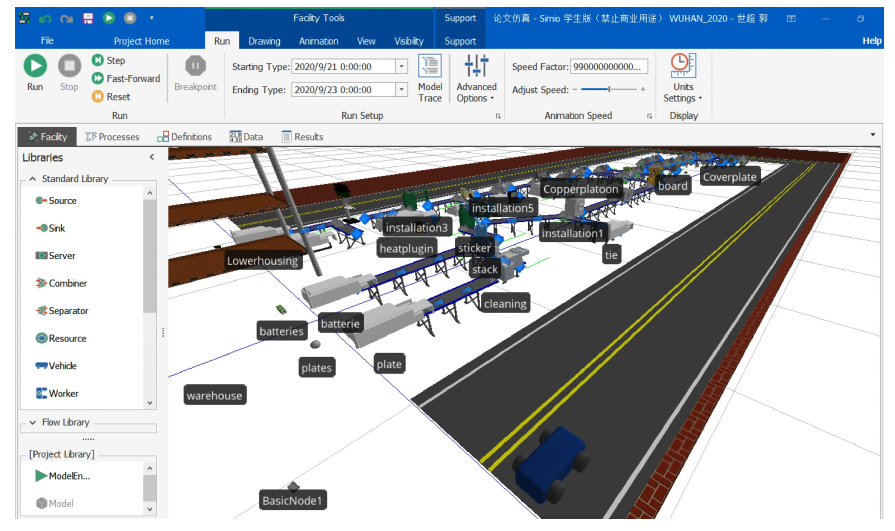
图3AGV物流配送仿真模型
2.3 AGV物流配送仿真运行机制
假设当前有多个订单,车间没有空闲,在连续生产。当订单下达到产线后,产线以线边仓有空料框移出使用位置为信号,呼叫小车配送物料。为模拟该情景,采用原材料库按照节拍定时产生各种物料,当某物料达到满箱时呼叫AGV小车进行配送。
这种仓库按照节拍驱动物料配送时,当AGV数量足够多时,能够排除因仓库物料短缺影响产线生产的因素。
在SIMIO的Precesses中,对AGV调度规则进行编程,判断每个物料仓库产生哪种物料,当该物料达到满箱时,仓库的TransferNode呼叫AGV进行配送,否则等待。以防碰撞保护板(Boards)为例,当生产防碰撞保护板的仓库达到96个物料(满箱)时,呼叫AGV,否则等待。AGV的响应规则如图4所示。
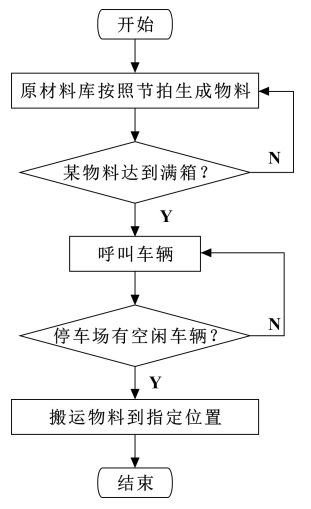
图4AGV的响应规则
三、仿真结果分析
3.1 参数设置
车间由26个工位、1个原材料库、1个上下箱体库、1个成品库和AGV停车场组成。其中,自动化工位有19个、人工工位7个,自动化工位需要AGV运输物料的工位有11个,已在图2中标出。AGV在生产线两侧的双向通道通行,文中只讨论需要AGV运输物料的工位,对模型进行简化。
对AGV的数量、运载能力进行调配,配置合适的配送资源,使物料能够准时送到产线,不影响产线生产,使设备平均利用率、AGV平均利用率达到最高,AGV行走总路线长度最少。
采用上述SIMIO仿真模型,将案例相关数据运用到仿真模型中,对AGV数量设置了7水平,分别为2、3、4、5、6、7、8,运输能力设置了7水平,分别为200、250、300、350、400、450、500个,设置运行时间为48h。采用全因子实验方式,共进行49组实验。
3.2 AGV配送方案的方差分析
利用Minitab软件对配送方案数据进行处理,把配送方案数据表导入到数据窗格中,对数据进行方差分析,结果如表1所示。若P值小于0.05,则认为具有统计性显著影响。设备平均利用率、AGV平均利用率和AGV行走路线总长度的主效应分别如图5、图6和图7所示。
表1方差分析结果
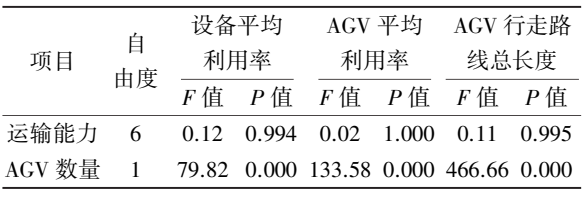
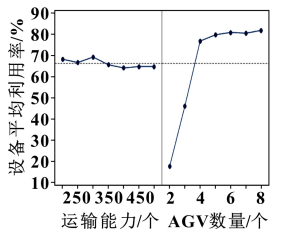
图5设备平均利用率主效应
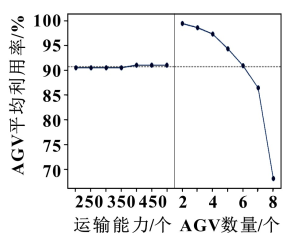
图6AGV平均利用率主效应
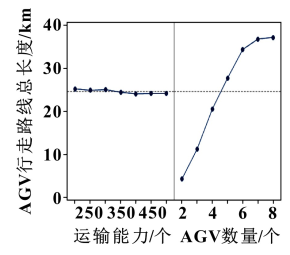
图7AGV行走路线总长度主效应
由表1可知:(1)AGV的运输能力P值均大于0.05,说明AGV的运输能力与设备平均利用率、AGV平均利用率和AGV行走路线总长度没有显著统计性差异;(2)AGV数量P值均等于0,说明AGV数量与设备平均利用率、AGV平均利用率和AGV行走路线总长度有显著差异。
由图5、图6和图7可知,AGV运输能力在主效应图中是一条围绕中线波动很小的折线。由图5可知,随着AGV数量增加,设备平均利用率先快速上升,当AGV数量达到4之后趋于平稳。
由图6可知,随AGV数量增加,AGV平均利用率先缓慢下降,当AGV数量达到6之后呈直线下降趋势。
由图7可知,随AGV数量增加,AGV行走路线总长度先快速上升,当AGV数量达到6之后趋于平稳。因此,AGV的运输能力对3种因变量没有显著性影响,同时可以看到当AGV数量为2、3时,设备平均利用率不超过60%;当AGV数量为8时,AGV平均利用率不足70%。
3.3 AGV配送方案优化配置的敏感性分析
因运载能力无显著统计性影响,AGV数量与设备平均利用率、AGV行走路线总长度是正相关,与AGV平均利用率是负相关。因此,如何权衡AGV数量是解决问题的重点。
采用响应优化方法,通过Minitab修改3个因变量的目的、权重和约束等,输入数据以49组实验结果为依据,AGV运输能力为200个。设置设备平均利用率目标为最高的设备平均利用率,权重为9.6;AGV平均利用率目标为最高的平均利用率,权重为0.2;行走路线总长度目标为最短的路线,权重为0.2。
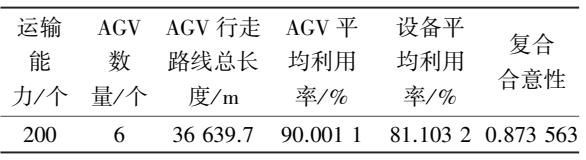
AGV物流配送优化方案如表2所示,当AGV数量为6时,AGV行走路线总长度、AGV平均利用率和设备平均利用率达到均衡,此方案为智能车间的物料配送的较优方案。
表2AGV物流配送优化方案
3.4 与原方案的性能对比
新能源电池包智能装配车间,原方案需订购3辆运载能力为300个/辆的AGV。优化后的方案订购6辆运载能力为200个/辆的AGV。对比优化前后的方案,结果如表3所示。
表3车间性能比较

由表3可得:从AGV成本来看,可以选购运载能力比较低的AGV,同时AGV的数量增加了一倍;从结果来看,设备平均利用率跟成品下线数量得到了显著提高,分别提高了30%、28%,同时AGV平均利用率和AGV行走路线总长度出现了负面影响,其中AGV平均利用率降低了95%、AGV行走路线总长度增加了166%。
但是,由于设备平均利用率的权重远远大于AGV平均利用率和AGV行走路线总长度的权重,而且单个电池包的净利润在1万元左右,产能提升带来的利润远远大于AGV成本的投入。
因此,优化后的方案权衡了智能装配车间的成本投入和利润,使企业的收益最大化。企业可根据自身情况赋予设备平均利用率、AGV平均利用率和AGV行走路线总长度不同的权重,来权衡企业的资源投入,对于提高企业的生产效率、降低成本、增加利润有一定参考。
四、结论
本文以某新能源企业的智能装配车间为研究对象,利用SIMIO仿真软件构建仿真模型,对物料配送小车的运载能力和物料配送小车数量进行分析。
介绍了模型构建的主要过程和运行机制,设置了2因子7水平,进行了49组实验,得到了不同组合下的实验数据。借助Minitab软件对所得数据进行处理,通过方差分析得出因子与实验指标的相关关系来控制无关因子,最后通过响应优化得到了一个较优方案。
研究成果为智能车间AGV的配置提供了有效的方法,权衡了智能装配车间的AGV成本投入和成品利润,保证车间的生产效率,提高利润。文中仅考虑了设备与AGV连续运行状态的模型构建,未来可考虑设备与AGV故障率等因素,以进一步贴近生产实际。
知名企业
读者福利:
福利
知识社区:主要包含智能仓储物流自动化规划设计,自动化立体库、智能机器人,自动化拣选系统,仓储管理软件WMS,AGV/AMR应用等。
免费提供一些解决方案、行业报告、PPT、电子书、手册、技术资料等干货(目前30G+,并实时更新),全部可下载。
视频课程
-智能仓储物流技术研习社-
打通智能物流系统甲方、集成商与周边配套商
立体库 | AGV | 机器人 | 拣选 | 分拣 | 仿真
| WMS | WCS | 输送 | 包装
|规划| |报告| |趋势| |历史|
制造业| 电商 | 快递 | 鞋服 | 家具 | 商超
| 零售 | 医药 | 冷链 | 第三方
更多推荐
AGV系统设计解析:布局-车体-对接-对接-数量计算-路径规划

















 1483
1483

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









