







基于神经网络的自适应PID控制器 通过将RBF(BP)神经网络和PID控制器相结合,建立了神经网络PID控制器,采用传递函数进行系统建模,通过自动调整PID参数,实现了对方波信号的跟踪。
程序有注释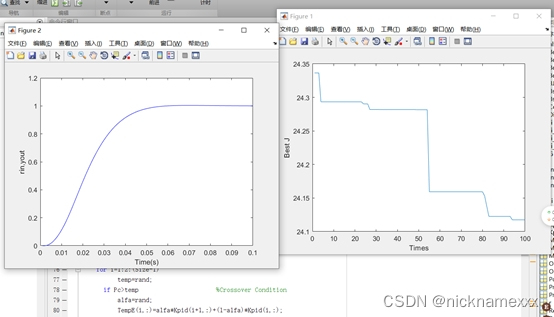
基于神经网络的自适应PID控制器
摘要
在工业控制领域中,PID控制器是一种广泛应用的控制算法。然而,在面对复杂的系统和多变的工况时,传统的PID控制器可能无法实现最优的控制效果。为此,本文提出了一种基于神经网络的自适应PID控制器,通过将RBF(BP)神经网络和PID控制器相结合,实现了对 方波信号的跟踪。本文使用传递函数对系统进行建模,并通过自动调整PID参数,优化控制效果。
一、引言
PID控制器在工业控制领域中具有悠久的历史,其通过比例、积分、微分三个参数的调整,实现对系统的控制。然而,传统的PID控制器在面对复杂的系统和多变的工况时,其控制效果可能会受到限制。近年来,神经网络在控制系统中的应用得到了广泛的关注,其具有良好的学习和自适应能力。因此,将神经网络与PID控制器相结合,有望提升控制器的适应性和控制效果。
二、神经网络PID控制器设计
本文提出的神经网络PID控制器,主要包括两个部分:RBF(BP)神经网络和PID控制器。其中,RBF(BP)神经网络负责学习系统的动态特性,提供最优的PID参数;PID控制器则负责实现对方波信号的跟踪。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4362
4362











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









