







 本文详细介绍了基于51单片机的扫地小车设计,包括原理图、程序代码,具备寻迹避障、来回清扫和往返清扫功能。通过实验验证,设计具有实用性和可行性。
本文详细介绍了基于51单片机的扫地小车设计,包括原理图、程序代码,具备寻迹避障、来回清扫和往返清扫功能。通过实验验证,设计具有实用性和可行性。
基于51单片机的扫地小车,扫地机器人设计。
有原理图,程序代码,原文。
可做实物。
主要功能有寻迹避障,来回清扫功能,往返清扫功能。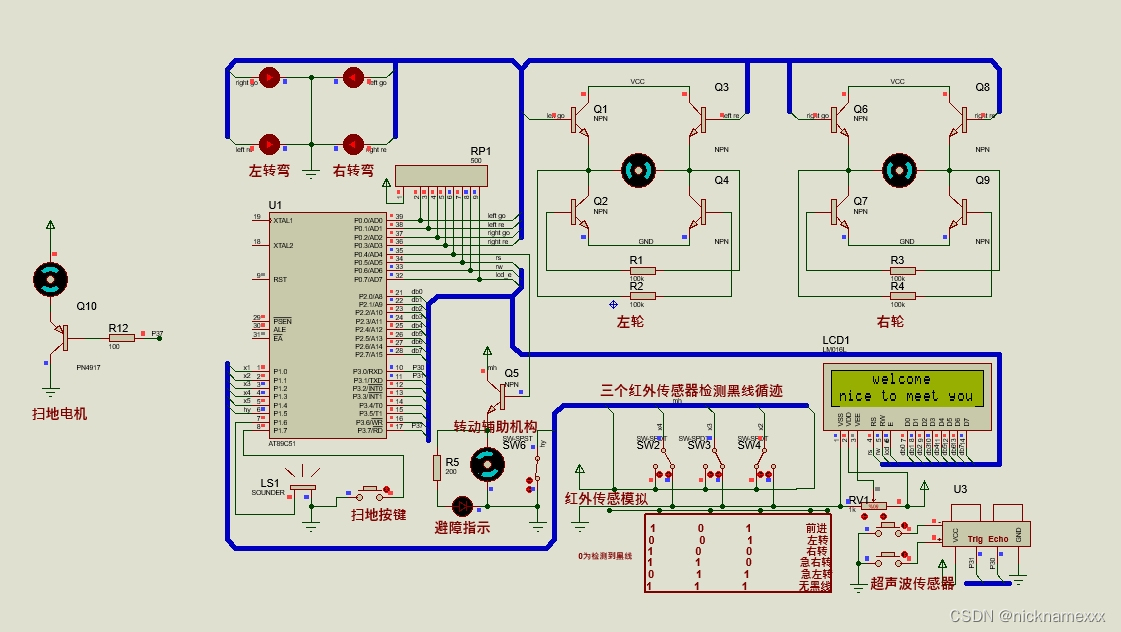
基于51单片机的扫地小车的设计与实现
摘要:
本文详细介绍了一种基于51单片机的扫地小车的设计与实现。该设计包括原理图、程序代码,并可以实现寻迹避障、来回清扫和往返清扫等功能。本文旨在为从事扫地机器人领域的研发人员提供一种实用的设计和实现方案。
引言:
随着人们生活水平的提高,家庭清洁已经成为日常生活中必不可少的一部分。传统的清扫方式已经无法满足人们对高效、智能和便捷的需求。因此,扫地机器人的出现极大地解决了这一问题,而基于51单片机的扫地小车则具有更高的性能和更广泛的应用前景。
一、总体设计:
1.1 设计目标
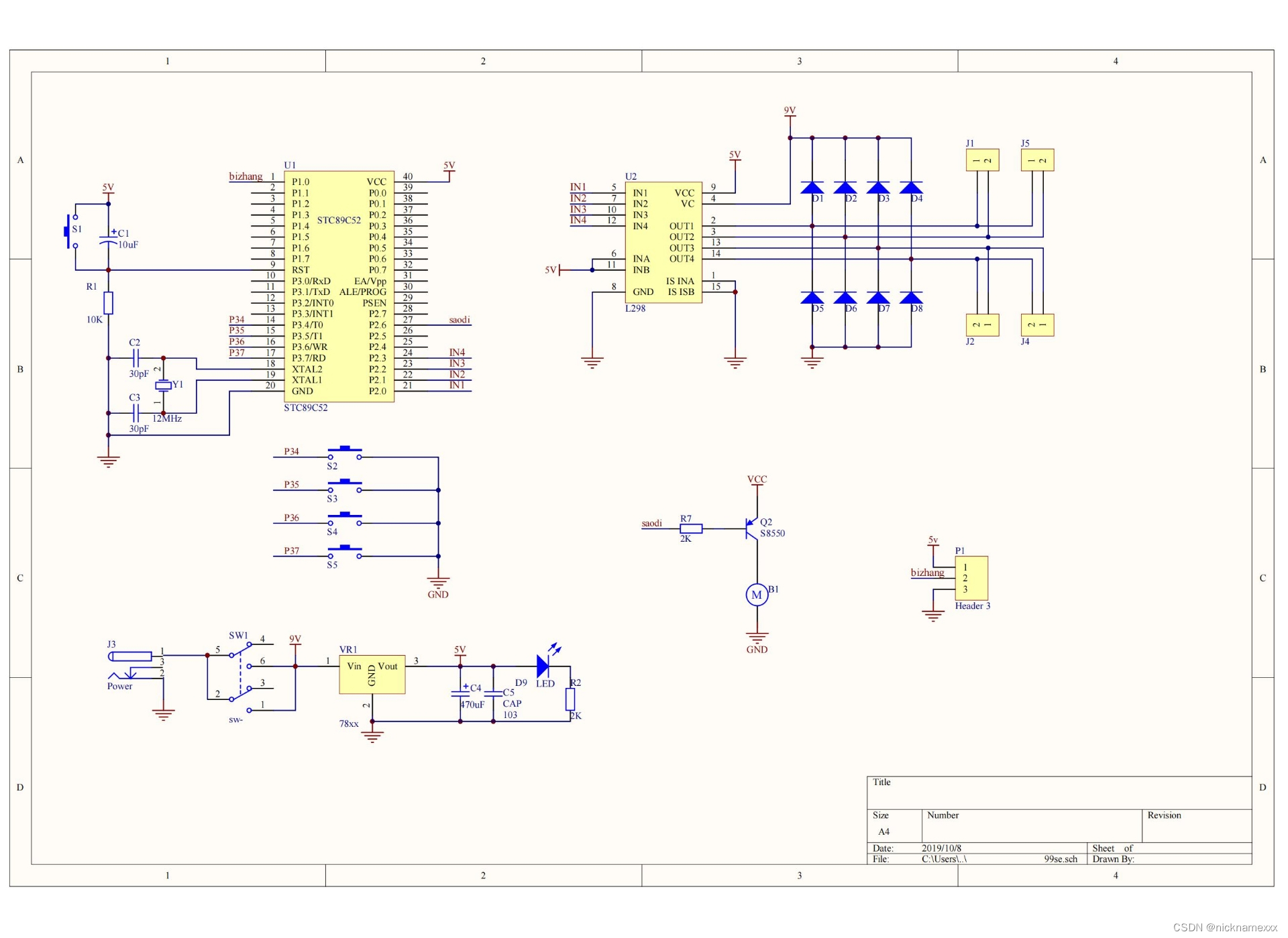
本文的设计目标是基于51单片机的扫地小车,可以实现以下功能:
(1)寻迹避障功能:小车能够识别黑色引导线,并在行驶过程中避开障碍物;
(2)来回清扫功能:小车能够在指定区域内进行来回清扫,提高清扫效率;
(3)往返清扫功能:小车能够按照设定的路径进行往返
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2153
2153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









