









 介绍了一种自适应模糊PID控制算法,通过模糊逻辑调整PID参数,提高系统的稳定性和响应速度。适用于需要精确控制的应用场景。
介绍了一种自适应模糊PID控制算法,通过模糊逻辑调整PID参数,提高系统的稳定性和响应速度。适用于需要精确控制的应用场景。
一、自适应模糊PID原理
自适应模糊PID 控制系统结构如图所示。控制系统以偏差e和偏差变化率ec作为输入量,利用模糊规则进行模糊推理,输出Δkp,Δki,Δkd。对PID三个参数进行在线分析与调整,而自适应模糊PID 控制器输出u( t) 作用Mosfet开关管上,从而使sepic的输出电压达到要求的实时稳定性。
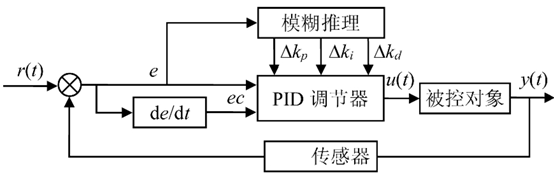
图 4.2.1 模糊PID结构图
系统采用两输入一输出的模糊控制器的形式,以密度偏差e 和偏差变化率ec 作为模糊控制器的输入量,以PID 参数的修正量Δkp,Δki,Δkd分别为模糊控制器的输出量。其变量、基本论域、模糊子集、模糊论域、量化因子、比例因子如表所示。考虑到论域覆盖范围和灵敏度,并且为了F28027计算简便,各模糊子集采用三角形隶属函数。
表 4.2.1 ΔKp模糊规则表

表4.2.2ΔKi模糊规则表

表4.2.3ΔKd模糊规则表
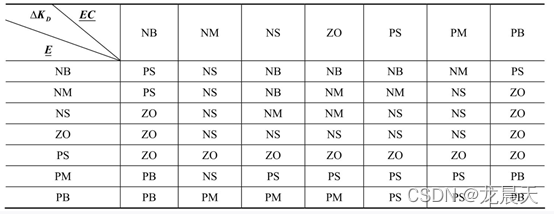
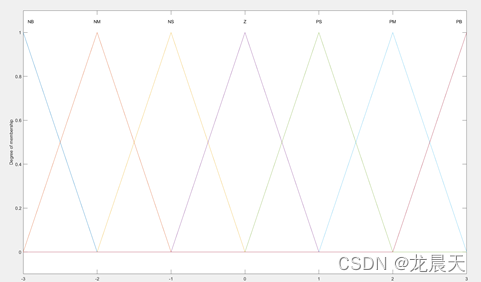
图4.2.2 隶属度函数
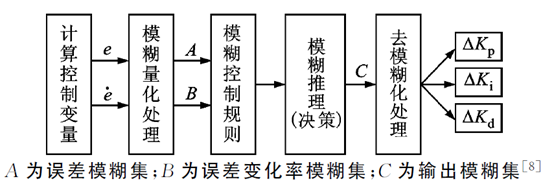
根据已经确立的模糊控制规则和隶属度函数,采用Mamdani推理方法,面积重心法非模糊化。

总结一下,整个模糊自适应PID的运算工程如下所示:
二、代码实现
该工程来自https://github.com/FlameAlpha/fuzzy-pid
某位国内大佬编写,顶礼膜拜。
fuzzy_pid.h
#ifndef _FUZZY_PID_H_
#define _FUZZY_PID_H_
#ifdef __cplusplus
extern "C" {
#endif
#include "math.h"
#include "stdlib.h"
#include "User_Component/mySci/printf.h"
#ifndef bool
#define bool char
#endif
#ifndef false
#define false (char)0
#endif
#ifndef true
#define true (char)1
#endif
// Fuzzy quantity fields
enum quantity_fields
{
qf_small = 5,
qf_middle = 7,
qf_large = 8
};
#define qf_default qf_middle
struct fuzzy
{
unsigned int input_num;
unsigned int output_num;
unsigned int fo_type;
unsigned int *mf_type;
int *mf_params;
unsigned int df_type;
int *rule_base;
float *output;
};
struct PID
{
float kp;
float ki;
float kd;
float delta_kp_max;
float delta_ki_max;
float delta_kd_max;
float delta_kp;
float delta_ki;
float delta_kd;
float error_max;
float delta_error_max;
float last_error;
float current_error;
float intergral;
float intergral_limit;
float dead_zone;
float feed_forward;
float output;
int output_min_value;
int output_middle_value;
int output_max_value;
float linear_adaptive_kp;
struct fuzzy *fuzzy_struct;
};
#define NB -3
#define NM -2
#define NS -1
#define ZO 0
#define PS 1
#define PM 2
#define PB 3
//#define fuzzy_pid_debug_print
//#define fuzzy_pid_dead_zone
//#define fuzzy_pid_integral_limit
//#define fuzzy_pid_rule_base_deep_copy
#define pid_params_count 7
#define torque_mode 1
#define position_mode 2
#define control_mode position_mode
#if control_mode == position_mode
#define max_error 5.0f
#define max_delta_error 5.0f
#else
#define max_error 12.0f
#define max_delta_error 12.0f
#endif
#define min_pwm_output 250
#define middle_pwm_output 1500
#define max_pwm_output 2900
struct fuzzy *fuzzy_init(unsigned int input_num, unsigned int output_num);
void fuzzy_params_init(struct fuzzy *fuzzy_struct, unsigned int mf_type, unsigned int fo_type, unsigned int df_type,
int mf_params[], int rule_base[][qf_default]);
void fuzzy_control(float e, float de, struct fuzzy *fuzzy_struct);
struct PID *raw_fuzzy_pid_init(float kp, float ki, float kd, float integral_limit, float dead_zone,
float feed_forward, float error_max, float delta_error_max, float delta_kp_max,
float delta_ki_max, float delta_kd_max, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int *mf_params, int rule_base[][qf_default],
int output_min_value, int output_middle_value, int output_max_value);
//float params[pid_params_count] = {kp, ki, kd, integral_limit, dead_zonefeed_forward, linear_adaptive_kp};
struct PID *fuzzy_pid_init(float *params, float delta_k, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int mf_params[], int rule_base[][qf_default]);
struct PID **
fuzzy_pid_vector_init(float params[][pid_params_count], float delta_k, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int *mf_params, int rule_base[][qf_default],
unsigned int count);
float fuzzy_pid_control(float real, float idea, struct PID *pid);
int direct_control(int zero_value, int offset_value, bool direct);
int fuzzy_pid_motor_pwd_output(float real, float idea, bool direct, struct PID *pid);
void delete_pid(struct PID *pid);
void delete_pid_vector(struct PID **pid_vector, unsigned int count);
#ifdef __cplusplus
}
#endif
#endif //_FUZZY_PID_H_
fuzzy_pid.c
#include "User_Component/myPID/fuzzy_pid.h"
struct fuzzy *fuzzy_init(unsigned int input_num, unsigned int output_num)
{
struct fuzzy *fuzzy_struct = (struct fuzzy *) malloc(sizeof(struct fuzzy));
fuzzy_struct->input_num = input_num;
fuzzy_struct->output_num = output_num;
fuzzy_struct->mf_type = (unsigned int *) malloc((input_num + output_num) * sizeof(unsigned int));
#ifdef fuzzy_pid_rule_base_deep_copy
fuzzy_struct->mf_params = (int *) malloc(4 * qf_default * sizeof(int));
fuzzy_struct->rule_base = (int *) malloc(output_num * qf_default * qf_default * sizeof(int));
#endif
fuzzy_struct->output = (float *) malloc(output_num * sizeof(float));
return fuzzy_struct;
}
void delete_fuzzy(struct fuzzy *fuzzy_struct)
{
free(fuzzy_struct->mf_type);
free(fuzzy_struct->output);
free(fuzzy_struct);
}
void fuzzy_params_init(struct fuzzy *fuzzy_struct, unsigned int mf_type, unsigned int fo_type, unsigned int df_type,
int mf_params[], int rule_base[][qf_default])
{
for (unsigned int i = 0; i < fuzzy_struct->input_num + fuzzy_struct->output_num; ++i)
{
fuzzy_struct->mf_type[i] = mf_type;
}
for (unsigned int i = 0; i < fuzzy_struct->output_num; ++i)
{
fuzzy_struct->output[i] = 0;
}
#ifdef fuzzy_pid_rule_base_deep_copy
for (unsigned int j = 0; j < 4 * qf_default; ++j)
{
fuzzy_struct->mf_params[j] = mf_params[j];
}
for (unsigned int k = 0; k < fuzzy_struct->output_num * qf_default; ++k)
{
for (unsigned int i = 0; i < qf_default; ++i)
{
fuzzy_struct->rule_base[k * 7 + i] = rule_base[k][i];
}
}
#else
fuzzy_struct->mf_params = mf_params;
fuzzy_struct->rule_base = (int *) rule_base;
#endif
fuzzy_struct->fo_type = fo_type;
fuzzy_struct->df_type = df_type;
}
#define inverse(parameter) 1.0f/(float)parameter
// Gaussian membership function
float gaussmf(float x, float sigma, float c)
{
return expf(-powf(((x - c) / sigma), 2.0f));
}
// Generalized bell-shaped membership function
float gbellmf(float x, float a, float b, float c)
{
return inverse(1.0f + powf(fabsf((x - c) / a), 2.0f * b));
}
// Sigmoidal membership function
float sigmf(float x, float a, float c)
{
return inverse(1.0f + expf(a * (c - x)));
}
// Trapezoidal membership function
float trapmf(float x, float a, float b, float c, float d)
{
if (x >= a && x < b)
return (x - a) / (b - a);
else if (x >= b && x < c)
return 1.0f;
else if (x >= c && x <= d)
return (d - x) / (d - c);
else return 0.0f;
}
// Triangular membership function
float trimf(float x, float a, float b, float c)
{
return trapmf(x, a, b, b, c);
}
// Z-shaped membership function
float zmf(float x, float a, float b)
{
if (x <= a)
return 1.0f;
else if (x >= a && x <= (a + b) / 2.0f)
return 1.0f - 2.0f * powf((x - a) / (b - a), 2.0f);
else if (x >= (a + b) / 2.0f && x < b)
return 2.0f * powf((x - b) / (b - a), 2.0f);
else return 0;
}
// Membership function
float mf(float x, unsigned int mf_type, int *params)
{
switch (mf_type)
{
case 0:
return gaussmf(x, params[0], params[1]);
case 1:
return gbellmf(x, params[0], params[1], params[2]);
case 2:
return sigmf(x, params[0], params[2]);
case 3:
return trapmf(x, params[0], params[1], params[2], params[3]);
case 5:
return zmf(x, params[0], params[1]);
default: // set triangular as default membership function
return trimf(x, params[0], params[1], params[2]);
}
}
// Union operator
float or (float a, float b, unsigned int type)
{
if (type == 1) // algebraic sum
{
return a + b - a * b;
}
else if (type == 2) // bounded sum
{
return fminf(1, a + b);
}
else // fuzzy union
{
return fmaxf(a, b);
}
}
// Intersection operator
float and (float a, float b, unsigned int type)
{
if (type == 1) // algebraic product
{
return a * b;
}
else if (type == 2) // bounded product
{
return fmaxf(0, a + b - 1);
}
else // fuzzy intersection
{
return fminf(a, b);
}
}
// Equilibrium operator
float equilibrium(float a, float b, float params)
{
return powf(a * b, 1 - params) * powf(1 - (1 - a) * (1 - b), params);
}
// Fuzzy operator
float fo(float a, float b, unsigned int type)
{
if (type < 3)
{
return and (a, b, type);
}
else if (type < 6)
{
return or (a, b, type - 3);
}
else
{
return equilibrium(a, b, 0.5f);
}
}
// Mean of centers defuzzifier, only for two input multiple index
void moc(const float *joint_membership, const unsigned int *index, const unsigned int *count, struct fuzzy *fuzzy_struct)
{
float denominator_count = 0;
// float numerator_count[fuzzy_struct->output_num];
//注意 TI的C99编译器并不是完全支持动态数组的特性,所以这里改变了一下(c89写法)
float *numerator_count= (float *)malloc(fuzzy_struct->output_num*sizeof(float));
for (unsigned int l = 0; l < fuzzy_struct->output_num; ++l)
{
numerator_count[l] = 0;
}
for (int i = 0; i < count[0]; ++i)
{
for (int j = 0; j < count[1]; ++j)
{
denominator_count += joint_membership[i * count[1] + j];
}
}
for (unsigned int k = 0; k < fuzzy_struct->output_num; ++k)
{
for (unsigned int i = 0; i < count[0]; ++i)
{
for (unsigned int j = 0; j < count[1]; ++j)
{
numerator_count[k] += joint_membership[i * count[1] + j] *
fuzzy_struct->rule_base[k * qf_default * qf_default + index[i] * qf_default +
index[count[0] + j]];
}
}
}
#ifdef fuzzy_pid_debug_print
printf("output:\n");
#endif
for (unsigned int l = 0; l < fuzzy_struct->output_num; ++l)
{
fuzzy_struct->output[l] = numerator_count[l] / denominator_count;
#ifdef fuzzy_pid_debug_print
printf("%f,%f,%f\n", numerator_count[l], denominator_count, fuzzy_struct->index[l]);
#endif
}
free(numerator_count);//有借有还再借不难
}
// Defuzzifier
void df(const float *joint_membership, const unsigned int *output, const unsigned int *count, struct fuzzy *fuzzy_struct,
int df_type)
{
if (df_type == 0)
moc(joint_membership, output, count, fuzzy_struct);
else
{
printf("Waring: No such of defuzzifier!\n");
moc(joint_membership, output, count, fuzzy_struct);
}
}
void fuzzy_control(float e, float de, struct fuzzy *fuzzy_struct)
{
float membership[qf_default * 2]; // Store membership
unsigned int index[qf_default * 2]; // Store the index of each membership
unsigned int count[2] = {0, 0};
{
int j = 0;
for (int i = 0; i < qf_default; ++i)
{
float temp = mf(e, fuzzy_struct->mf_type[0], fuzzy_struct->mf_params + 4 * i);
// if (temp > 1e-4)
// {
membership[j] = temp;
index[j++] = i;
// }
}
count[0] = j;
for (int i = 0; i < qf_default; ++i)
{
float temp = mf(de, fuzzy_struct->mf_type[1], fuzzy_struct->mf_params + 4 * i);
// if (temp > 1e-4)
// {
membership[j] = temp;
index[j++] = i;
// }
}
count[1] = j - count[0];
}
#ifdef fuzzy_pid_debug_print
printf("membership:\n");
for (unsigned int k = 0; k < j; ++k)
{
printf("%f\n", membership[k]);
}
printf("index:\n");
for (unsigned int k = 0; k < j; ++k)
{
printf("%d\n", index[k]);
}
printf("count:\n");
for (unsigned int k = 0; k < 2; ++k)
{
printf("%d\n", count[k]);
}
#endif
if (count[0] == 0 || count[1] == 0)
{
for (unsigned int l = 0; l < fuzzy_struct->output_num; ++l)
{
fuzzy_struct->output[l] = 0;
}
return;
}
// Joint membership
//注意 TI的C99编译器并不是完全支持动态数组的特性,所以这里改变了一下(c89写法)
// float joint_membership[count[0] * count[1]];
float *joint_membership= (float *)malloc(count[0] * count[1]*sizeof(float));
for (int i = 0; i < count[0]; ++i)
{
for (int j = 0; j < count[1]; ++j)
{
joint_membership[i * count[1] + j] = fo(membership[i], membership[count[0] + j], fuzzy_struct->fo_type);
}
}
df(joint_membership, index, count, fuzzy_struct, 0);
free(joint_membership);
}
struct PID *raw_fuzzy_pid_init(float kp, float ki, float kd, float integral_limit, float dead_zone,
float feed_forward, float error_max, float delta_error_max, float delta_kp_max,
float delta_ki_max, float delta_kd_max, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int mf_params[], int rule_base[][qf_default],
int output_min_value, int output_middle_value, int output_max_value)
{
struct PID *pid = (struct PID *) malloc(sizeof(struct PID));
pid->kp = kp;
pid->ki = ki;
pid->kd = kd;
pid->delta_kp_max = delta_kp_max;
pid->delta_ki_max = delta_ki_max;
pid->delta_kd_max = delta_kd_max;
pid->delta_kp = 0;
pid->delta_ki = 0;
pid->delta_kd = 0;
pid->error_max = error_max;
pid->delta_error_max = delta_error_max;
int output_count = 1;
if (ki > 1e-4)
{
output_count += 1;
if (kd > 1e-4)
output_count += 1;
}
pid->fuzzy_struct = fuzzy_init(2, output_count);
fuzzy_params_init(pid->fuzzy_struct, mf_type, fo_type, df_type, mf_params, rule_base);
pid->last_error = 0;
pid->current_error = 0;
pid->intergral = 0;
pid->intergral_limit = integral_limit;
pid->dead_zone = dead_zone;
pid->feed_forward = feed_forward;
pid->output_max_value = output_max_value;
pid->output_middle_value = output_middle_value;
pid->output_min_value = output_min_value;
return pid;
}
struct PID *fuzzy_pid_init(float *params, float delta_k, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int mf_params[], int rule_base[][qf_default])
{
return raw_fuzzy_pid_init(params[0], params[1], params[2], params[3], params[4], params[5], max_error,
max_delta_error, params[0] / delta_k, params[1] / delta_k, params[2] / delta_k, mf_type,
fo_type, df_type, mf_params,
rule_base, min_pwm_output, middle_pwm_output, max_pwm_output);
}
int round_user(float parameter)
{
if ((int)(parameter * 10.0) % 10 >= 5)
return parameter + 1;
else
return parameter;
}
int limit(int value, int max_limit, int min_limit)
{
if (value > max_limit)
return max_limit;
if (value < min_limit)
return min_limit;
return value;
}
float limits(float value, float max_limit, float min_limit)
{
if (value > max_limit)
return max_limit;
if (value < min_limit)
return min_limit;
return value;
}
float fuzzy_pid_control(float real, float idea, struct PID *pid)
{
pid->last_error = pid->current_error;
pid->current_error = idea - real;
float delta_error = pid->current_error - pid->last_error;
float uk;
#ifdef fuzzy_pid_dead_zone
if (pid->current_error < pid->dead_zone && pid->current_error > -pid->dead_zone)
{
pid->current_error = 0;
}
else
{
if (pid->current_error > pid->dead_zone)
pid->current_error = pid->current_error - pid->dead_zone;
else
{
if (pid->current_error < -pid->dead_zone)
pid->current_error = pid->current_error + pid->dead_zone;
}
}
#endif
//关键代码
fuzzy_control(pid->current_error / pid->error_max * 3.0f, delta_error / pid->delta_error_max * 3.0f,
pid->fuzzy_struct);
// pid->delta_kp = limits(pid->fuzzy_struct->output[0]/3.0f * pid->delta_kp_max, pid->delta_kp_max ,-pid->delta_kp_max);
pid->delta_kp = limits(pid->fuzzy_struct->output[0], pid->delta_kp_max ,-pid->delta_kp_max);
if (pid->fuzzy_struct->output_num >= 2)
// pid->delta_ki = limits(pid->fuzzy_struct->output[1]/3.0f * pid->delta_ki_max, pid->delta_ki_max ,-pid->delta_ki_max);
pid->delta_ki = limits(pid->fuzzy_struct->output[1], pid->delta_ki_max ,-pid->delta_ki_max);
else pid->delta_ki = 0;
if (pid->fuzzy_struct->output_num >= 3)
// pid->delta_kd =limits(pid->fuzzy_struct->output[2]/3.0f * pid->delta_kd_max, pid->delta_kd_max ,-pid->delta_kd_max);
pid->delta_kd =limits(pid->fuzzy_struct->output[2], pid->delta_kd_max ,-pid->delta_kd_max);
else pid->delta_kd = 0;
#ifdef fuzzy_pid_debug_print
printf("kp : %f, ki : %f, kd : %f\n", pid->kp + pid->delta_kp, pid->ki + pid->delta_ki, pid->kd + pid->delta_kd);
#endif
// printf("kpkikd:%f,%f,%f,%f\n", pid->kp + pid->delta_kp, pid->ki + pid->delta_ki, pid->kd + pid->delta_kd,0.0);
pid->intergral += (pid->ki + pid->delta_ki) * pid->current_error;
#ifdef fuzzy_pid_integral_limit
if (pid->intergral > pid->intergral_limit)
pid->intergral = pid->intergral_limit;
else
{
if (pid->intergral < -pid->intergral_limit)
pid->intergral = -pid->intergral_limit;
}
#endif
// //这里位置式PID算法
// pid->output = (pid->kp + pid->delta_kp) * pid->current_error + pid->intergral +
// (pid->kd + pid->delta_kd) * (pid->current_error - pid->last_error);
uk = (pid->kp + pid->delta_kp) * pid->current_error + pid->intergral +
(pid->kd + pid->delta_kd) * (pid->current_error - pid->last_error);
// pid->output += pid->feed_forward * (float) idea;
uk +=pid->feed_forward * (float) idea;//前馈环节
pid->output = uk;
//限幅
if(pid->output<pid ->output_min_value)
pid->output=pid ->output_min_value;
else if (pid->output>pid ->output_max_value)
pid->output=pid ->output_max_value;
return pid->output;
}
void delete_pid(struct PID *pid)
{
if (pid->fuzzy_struct != NULL)
{
delete_fuzzy(pid->fuzzy_struct);
}
free(pid);
}
void delete_pid_vector(struct PID **pid_vector, unsigned int count)
{
for (unsigned int i = 0; i < count; ++i)
{
delete_pid(pid_vector[i]);
}
free(pid_vector);
}
struct PID **
fuzzy_pid_vector_init(float params[][pid_params_count], float delta_k, unsigned int mf_type, unsigned int fo_type,
unsigned int df_type, int *mf_params, int rule_base[][qf_default],
unsigned int count)
{
struct PID **pid = (struct PID **) malloc(sizeof(struct PID *) * count);
for (unsigned int i = 0; i < count; ++i)
{
pid[i] = fuzzy_pid_init(params[i], delta_k, mf_type, fo_type, df_type, mf_params, rule_base);
}
return pid;
}
int direct_control(int zero_value, int offset_value, bool direct)
{
if (direct == true)
{
return zero_value + offset_value;
}
else
{
return zero_value - offset_value;
}
}
int fuzzy_pid_motor_pwd_output(float real, float idea, bool direct, struct PID *pid)
{
return limit(direct_control(pid->output_middle_value, fuzzy_pid_control(real, idea, pid), direct),
pid->output_max_value, pid->output_min_value);
}
调用方法
//全局变量定义方式
struct PID **pid_vector;
//main函数中初始化
int rule_base[][qf_default] = {
//delta kp rule base
{PB, PB, PM, PM, PS, ZO, ZO},
{PB, PB, PM, PS, PS, ZO, NS},
{PM, PM, PM, PS, ZO, NS, NS},
{PM, PM, PS, ZO, NS, NM, NM},
{PS, PS, ZO, NS, NS, NM, NM},
{PS, ZO, NS, NM, NM, NM, NB},
{ZO, ZO, NM, NM, NM, NB, NB},
//delta ki rule base
{NB, NB, NM, NM, NS, ZO, ZO},
{NB, NB, NM, NS, NS, ZO, ZO},
{NB, NM, NS, NS, ZO, PS, PS},
{NM, NM, NS, ZO, PS, PM, PM},
{NM, NS, ZO, PS, PS, PM, PB},
{ZO, ZO, PS, PS, PM, PB, PB},
{ZO, ZO, PS, PM, PM, PB, PB},
//delta kd rule base
{PS, NS, NB, NB, NB, NM, PS},
{PS, NS, NB, NM, NM, NS, ZO},
{ZO, NS, NM, NM, NS, NS, ZO},
{ZO, NS, NS, NS, NS, NS, ZO},
{ZO, ZO, ZO, ZO, ZO, ZO, ZO},
{PB, PS, PS, PS, PS, PS, PB},
{PB, PM, PM, PM, PS, PS, PB}};
// Default parameters of membership function
int mf_params[4 * qf_default] = {-3, -3, -2, 0,
-3, -2, -1, 0,
-2, -1, 0, 0,
-1, 0, 1, 0,
0, 1, 2, 0,
1, 2, 3, 0,
2, 3, 3, 0};
float fuzzy_pid_params[1][pid_params_count] = {{25.4597502f, 10.0053997f, 15.59500027f, 1800, 0, 0, 1}};
struct PID **subpid_vector = fuzzy_pid_vector_init(fuzzy_pid_params, 4.0f, 4, 1, 0, mf_params, rule_base, 1);
pid_vector=subpid_vector;
//中断中调用
control_uk = fuzzy_pid_control(Voltage_Real, pid.Ref, pid_vector[0]);
if(control_uk<150)
control_uk=150;
else if (control_uk>2800)
control_uk=2800;


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









