







1、神经网络自整定PID真的有效吗?我看图书馆的参考书上和知网论文上的方法,感觉推导过程都不对啊?
楼主的这个问题已经是六年前的问题了(今天2021年5月),不知道楼主现在还关注这个话题不?神经网络自整定PID肯定是有效的。目前,神经网络自整定PID主要面临三个问题:一是初值选择的问题,不合理的初值很容易使闭环系统不稳定;二是神经网络自整定PID自身需要人为设定的参数较多,PID控制自身只需要三个人为设定参数,神经网络自整定PID则需要四个(三个初值和一个学习因子),这使得神经网络自整定PID比传统PID算法还要麻烦;三是缺乏完整的理论稳定性证明,神经网络自整定PID在线更新规则早已稳定,并且被广泛引用和应用,而基于神经网络自整定PID的闭环系统稳定性证明一直没有得到很好的解决,某种程度上,这限制了神经网络自整定PID的推广。
我个人也做了一些这样的研究,感兴趣的话可以参考我的一篇期刊论文。
Data-Driven Tracking Control Based on LM and PID Neural Network with Relay Feedback for Discrete Nonlinear Systems
谷歌人工智能写作项目:小发猫

2、什么叫单神经元自适应pid控制
神经元,也可以角感知器,结构和人的神经元细胞差不多,树突是信号采集的,每个树突都有自己的权重值,轴突是输出值,一般
用于逼近线性系统,PID纯粹就是控制器,这个楼主应该知道的神经网络自适应pid控制。当神经元很多并且形成形成层了就是我吗所说的神经网络了
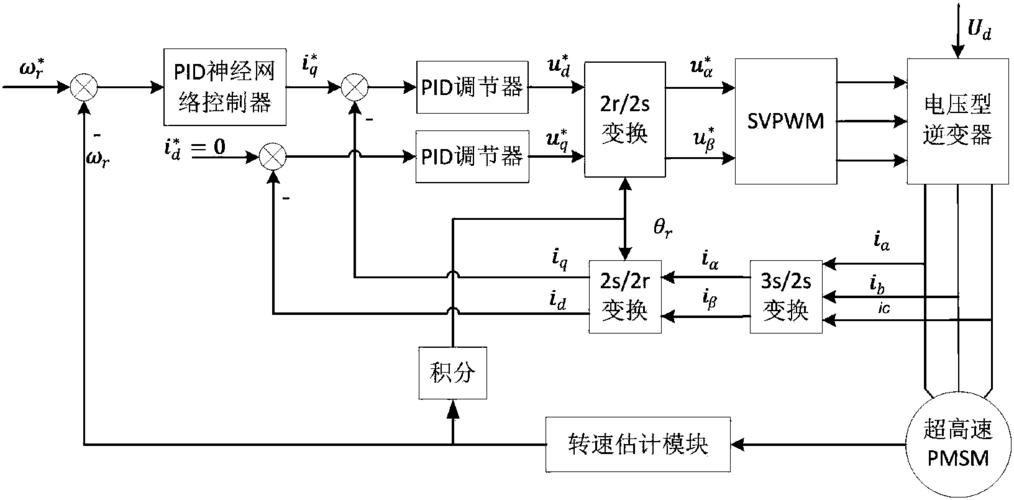
3、PID神经网络控制 10
是的,要进行归一化处理,输出也必须进行反归一化处理。
补充回答:
用原来的最大和最小值。
4、什么是PID调节器,并举例说明P、I、D的调节作用。
PID 调节器是一个在工业控制应用中常见的反馈回路部件,PID是以它的三种纠正算法而命名的。这三种算法都是用加法调整被控制的数值。而实际上这些加法运算大部分变成了减法运算因为被加数总是负值。以下是PID的调节作用举例:
1.比例- 来控制当前,误差值和一个负常数P(表示比例)相乘,然后和预定的值相加。P只是在控制器的输出和系统的误差成比例的时候成立。这种控制器输出的变化与输入控制器的偏差成比例关系。比如说,一个电热器的控制器的比例尺范围是10°C,它的预定值是20°C。那么它在10°C的时候会输出100%,在15°C的时候会输出50%,在19°C的时候输出10%,注意在误差是0的时候,控制器的输出也是0。
2.积分 - 来控制过去,误差值是过去一段时间的误差和,然后乘以一个负常数I,然后和预定值相加。I从过去的平均误差值来找到系统的输出结果和预定值的平均误差。一个简单的比例系统会振荡,会在预定值的附近来回变化,因为系统无法消除多余的纠正。通过加上一个负的平均误差比例值,平均的系统误差值就会总是减少。所以,最终这个PID回路系统会在预定值定下来。
3.微分 - 来控制将来,计算误差的一阶导,并和一个负常数D相乘,最后和预定值相加。这个导数的控制会对系统的改变作
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 4079
4079











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









