






3月14日,北大AI公开课第四讲邀请到了驭势科技联合创始人&CEO、原英特尔中国研究院院长、英特尔首席工程师吴甘沙老师亲临现场,与北大人工智能创新中心主任、百度七剑客之一、酷我音乐创始人雷鸣老师一起,就智能驾驶领域展开深入的讨论和交流。

雷鸣:吴甘沙和我也是很长时间的好朋友了。他以前是英特尔研究院的院长,带领整个英特尔研究院在中国的工作。一年多前,甘沙离开了英特尔中国研究院,创立了驭势科技,现在是创始人兼CEO。目前,无人驾驶在人工智能领域十分火热,可能是最大的,最有前景的几个方向之一,在全球范围内也非常热。昨天,英特尔花了100多亿美金收购Mobileye。可见这一领域确实非常火热。而且,中间大家的竞争、合作、收购、创新、创业,非常的热闹。下面有请甘沙,跟我们分享一下这个领域的一系列干货。
吴甘沙:谢谢,非常荣幸今天能够在这个晚上跟大家一起共度,分享一下我们对于智能驾驶的一些看法。原来讲座的题目叫无智能,不驾驶。后来有人跟我说,你拿这东西去糊弄90后,肯定不行,所以就只能想了一个新的名字:有多少爱AI可以重来。其实大家看这个名字就清楚,过去十多年,智能驾驶已经发展出来了一套AI体系,而现在,我们觉得可以把其中的一些东西推翻重来。一开始有个免责声明,因为我知道今天有很多人在看,所以这里面涉及到一些第三方的图片,视频,当然也有一些我们自己的(图片、视频)。
为什么要做智能驾驶?在我们选择一个方向,选择一个职业的时候,要问这个问题,而且不止问一遍,要问好几遍。如果说你的答案是能够经得起数次的考问,那真的是值得做的。

为什么要做呢?我们今天在城市里面看到很多的问题,堵车导致交通事故,违规驾驶等。大家知道如今全世界每年,因为交通事故死亡140万人。那么,交通事故又会导致路更加堵,百公里的油耗产生废气,排放雾霾等一系列的问题。而另一方面,停车难,又是另一个问题。给大家分享三个数据。第一,一辆车96%的时间是停着的,他而且需要两个停车位;第二,根据一个统计,在城市的商业中心CBD附近,35%的航行里程是与找停车位相关;第三,大城市15%以上的土地是用来停车的。所以大家可以想象,“房价贵”军功章里也有车的一半。因为房价会使得我们很多年轻人只能够生活在远离城市中心的郊区。于是大家看到了睡城,上下班的潮汐效应。还有一个触目惊心的数据:中国一天可能因为上下班交通浪费在路上10亿个小时。而五六千年以前古埃及人建造一座大金字塔就花了这么点时间。因此,我们如今一天浪费这么多的生产力。我们有一些解决方案,无论是摇号、限行、交通拥堵费,还是网约车,都没办法根本性上解决这些问题。我们认为系统性解决这个问题,要靠智能驾驶。
我们首先看今天为什么有那么多问题——本质上可能因为车太多。例如北京,有接近六百万私家车,而提供按需出行服务的出租车只有7万辆左右。对于我们绝大多数人来说,首先打车很难,其次打车很贵。还不如自己买辆车。这就是后面的逻辑。但是我们相信有了智能驾驶之后,在10年之后,北京的交通状况就不一样了。首先,城市里面车辆的总保有量可以减少一半,只有100万辆私家车,还有200万辆是出租车。而这些出租车是无人驾驶出租车。那么根据大数据的运算规律,我们可以根据全城人群的分布和出行的规律,把这200万辆车分布在城市的各个角落。保证每个人一叫车,两分钟之内就来车。而且,我们打车的费用可以降到今天的1/3。今天人力的成本(司机的成本)很高。
同时,未来新能源,每公里的成本又比今天的燃油要低。再加上,如今大量的油是浪费在空驶上,未来这个调度算法足够的好,没有空驶,那么这块的成本也省下了。因此,我们相信一定能够做到出租车费降下来。从此,城市的一系列的问题都可以解决。这个是国外某个大学的一个想象:未来城市里的车整整齐齐地开。大家看到,今天这么一小段距离可能只有两辆车,而在这个场景下呢,大家挨得紧紧的,这么短的距离可以容纳8辆车。道路的容量可以提升3倍。此外,可以极大减少90%以上的交通事故。同时,当第一辆车档掉风阻,后面的车可以开得非常省力,能源的效率也得到提升。至于停车,这种模式对停车位的需求极大地降低。城市里面熙熙攘攘,这些车都不需要停下来,晚上可以停到郊区去。即使需要停下来,只需要一个小小的停车位。大家知道,今天停车位必须足够大,因为太多人手潮,是新手。
在未来,这样的场景就会出现,大家可以想象,城市里每一条道路都会变得更窄。大量的停车位可以释放出来,因此房价会下降。大家可以脑补一下,一系列的情况都会发生。这样一个场景,在商业上也是一个巨大机会。大家知道,如今,“滴滴出行”一天的峰值能够达到2100万单。这什么概念呢?阿里巴巴全品类的电商相加一天大约是3000-5000万单。美团、大众点评吃喝玩乐住加起来一天大约1300万单。因此,出行是相当刚性的、高频的需求。但是,再往上走,其实很困难。因为受限于能够提供服务的车和人,再加上人力成本,其实今天快车比出租车也便宜不到哪里去。想再往上走,要突破这两个局限的,必须通过无人驾驶的出租车。
我相信未来滴滴一定是无人驾驶。一旦有无人驾驶,一天达到5亿单是完全没有问题的,这将成为电商所有品类当中最大的交易量。而且,未来的车可能长得不太像车,其交通工具的属性会降低,商业空间的属性会增加。大家再一次脑补,在里面放一台咖啡机,它就是移动星巴克;放一块大屏幕,它就是移动万达影城;放块小屏幕,它可以是移动的分众传媒;在里面放一套办公设备,它就移动的写字楼。未来你打车,可能就十来块钱,但喝杯咖啡需要二三十块钱,看场电影需要三四十块钱。因此,整套新的商业体系就会呈现出来,因此也给我们带来一个巨大的机会。
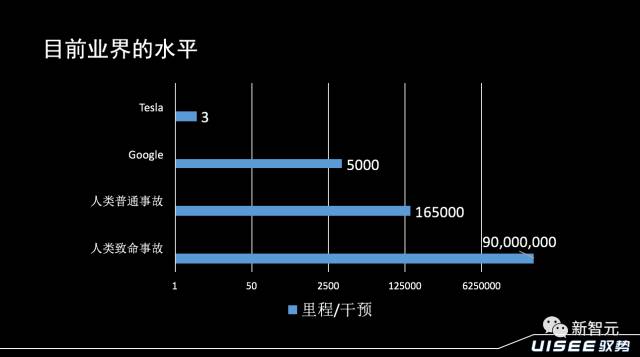
引用中国古人的一句话:时来天地皆同力,运去英雄不自由。看到这么一个大场面,大机会,我相信值得我们搭上未来20年。当然,因为一位老先生跟我说这个20年太长了,也许20年后大家都不用车,用飞行背包,用动力外骨骼,所以还是改成10年。也有人问,现在很多巨头在这里布局,目前进入是不是太晚了?其实并不晚,我给大家看一个数据。今天谷歌代表了业界最强水平,是无人驾驶5000英里需要一次人的干预;相较而言,特斯拉3英里需要一次人干预。但是,与人的驾驶相比起来还有差距。像美国平均驾驶员行驶105000英里,出现一次小的事故;行驶9000万英里出现一次死人的事故,所以差距不小。再加上,技术发展非常快,大家经常听见一个名词叫“后发优势”。其实,谷歌大量的技术是从2007年,2009年开发的。虽然它不断地加入新东西,但是若你从零开始,可以把最新的AI的技术加进去,就是非线性的加速。所以,对于后来者,其实还是有机会。我们相信,未来10年是智能驾驶技术发展的黄金时代。
那下面就会真正的讲AI了。智能驾驶里面有一些什么样的AI技术?我认为,有三样非常重要,我把它分成3种司机:第一种,叫新司机。想象一下,刚刚从驾校里面考到了驾照,你懂得交通规则,能够保证不去撞车和撞人;第二阶段,你开着开着,变成了一个认路的司机,在任何情况下都不会迷路;第三个阶段,就变成老司机。老司机体现在3个方面:一、开车开得非常好;二、你不肉,这个很有竞争性;三、碰到一些新的情况,你也不慌。
其实,智能驾驶要达到这3个方面:一是感知和认知的理解部分;二是地图和定位;三是认知的决策部分。先看感知和认知的理解,传统上无人驾驶,他是从“激光雷达”开始。激光雷达,向你呈现出来一个几何的世界。这个几何的世界是在你的记忆当中,你通过与这个几何世界互动,能够实现无人驾驶。大家可以看到,无论是树,草坪,车辆,房子等等,激光雷达都能够很准确地把模型建立出来。谷歌第一代、第二代、第三代无人驾驶车,上面有个激光雷达。这其中有个细节,最近大家看到谷歌的声明,他说把激光雷达的成本降低了90%。其实他在过去的某一个时间点,开始做自己的激光雷达。我认为他做了一个罩子,把激光雷达藏在里面,为了隐藏自己在做激光雷达的这么一个啊做法。百度的第一代、第二代车的顶上有激光雷达。两边和后面有3个小的激光雷达。顶上的激光雷达,在国内市价是70万人民币;3个小的激光雷达,每个大约是七八万人民币。这是钱堆出来的。我们做了一个低速车,上面其实也有一个激光雷达,就是七八万人民币。那么显然,这东西很贵,自然而然会让大家去想我有没有其他的解决方案——就是基于视觉以及毫米波雷达,超声波等等这些辅助传感器啊。但是,最重要的还是视觉,视觉构建的不是一个几何世界,是一个像素世界。基于一个像素世界,要去理解和预测,这是基于视觉的智能驾驶。
那么,我们拿在这一块商业化最为成功的特斯拉为例。这辆特斯拉Model S上面就有一个单目摄像头,作为它的主要的传感器;下面保险杠前面正中,有一个毫米波雷达;车周周边一圈有12个超声波传感器。大家可以看到这些小圆口都是超声波传感器。它通过这3种传感器,能够很好地达到新司机的要求,去理解规则,去感知这个世界。大家看这是一个典型的特斯拉行驶的情况,在这条双向路上,有两车道,大家可以看到它通过视觉把这两车道都标识出来。而且,车通过视觉,始终能够保持在车道中间开。他边上的超声波传感器,发现后面有车超车了。大家可以看到左边也有传感器,说明对面有来车。他现在打了右转,开到右边车道上,因为边上有栏杆,这时候超声波始终是在激发的状态。大家可以看到在整个的这个过程当中,视觉雷达和超声波都在发挥作用。
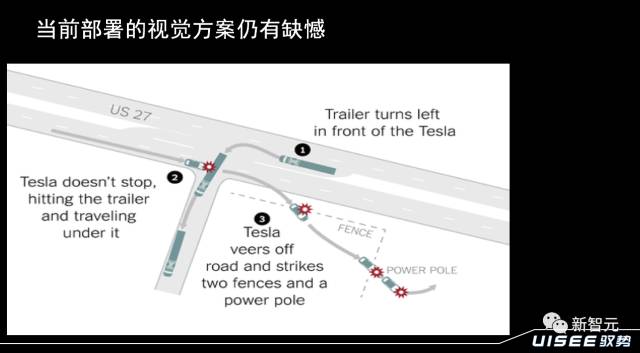
但是,这样一套方案事实上是有缺憾。这是在去年5月份发生了一起事故。当时,一辆大货车,在这个路口左拐横在了这条马路上,而一辆特斯拉的ModelS高速的开了过来。注意,像这样的一个辅助驾驶系统,驾驶员必须得全神贯注把注意力放在路上。而当时驾驶员在玩哈利波特。它的传感器没有发现这辆大货车。于是,他从车的下面钻了过去,之后驾驶员就当场身亡。这个悲剧的产生跟现在视觉方案的缺陷有关。
第一,视觉受到光照条件的影响。当时特斯拉的解释就是,当时车迎着晨曦,形成了强逆光,这对判断是有影响的;第二,这种算法,你可以把它归纳叫做的Detectionby Recognition,就是必须在你的数据库里面有这么一个障碍物,你要必须得recognize它,它才能够得detect。大家可以想象这个数据库必须得有足够的完备。因为,比如说在这边的高速上开,可能只有车;那在另外一条高速上开,他可能会有其他的动物,可能会出现了事故,会有人。所以,这个数据库必须得完备。非常遗憾的是,横着的车辆不在他的数据库里,所以他不能detect它,因此没有发现。
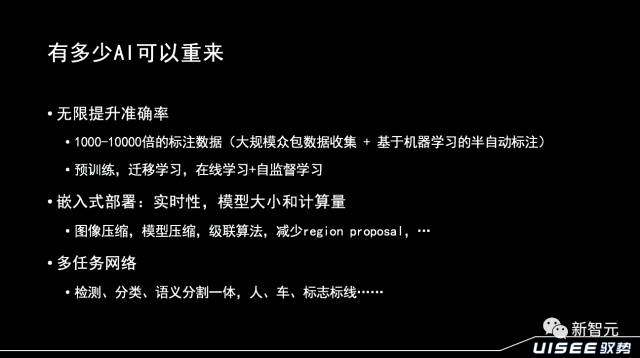
我们再看另外一个情况,比如说这辆特斯拉在开的时候,没有认出来栅栏,因为主要靠车道线。所以,像这样一些系统事实上是有缺陷。那怎么办呢?一种办法,就是重新回到几何世界,通过摄像头去构建一个几何的世界是。这是我们做的双目立体摄像头,无论是静态的障碍,我还是动态的障碍物,我都有一团点云来去标识它,点云呈现暖色调,代表离我们比较近;呈现冷色调,代表离我们比较远。当一辆车刚刚出现的时候,是暖色调,随着它渐行渐远的变成冷色调。这其实就是一种解决问题的办法,即不用再去recognize他是什么东西,但我必须得通过对这个几何世界的建模去了解这里有障碍。哪怕这个障碍物是不规则,虽然不能认得出来他,但是我知道这边有个障碍物,这是解决问题的一种办法。那么还有一种办法——通过更好的计算机视觉,即所谓的语音分割。通过更好的分割办法,去发现障碍物,找到可行驶区域。大家注意刚才没有发现篱笆墙,其实他对可行驶区域判断出错。如果有一个很好的分割算法,这个障碍物上面没有紫色,那么只有可行驶的区域,才被涂上紫色。这时,汽车对环境的感知能力就提升了。就是将可行驶区域的检测和车辆检测结合在一起。比如说这边需要经过一个天桥,出天桥的时候,出现了过曝的情况。这时候你的视觉算法要足够的鲁棒,才能够保证不会遗漏掉障碍物。还有这个训练模型要鲁棒,大货车跟普通的车是不一样的,也要能够把它检测出来。刚才说的这些都是已经在使用的方法,还有很多可以去改进的地方,提几个点:第一,即使是用了深度学习,在一个复杂场景里面,对障碍物的识别率,比如对车辆的识别率可能只有90%出头,对自行车骑车者,只有百分之七八十。有种办法是,通过更多的标注数据。今天我们一般训练可能拿10万张标注数据去训练。如果有能力去获得几十亿张,甚至是几百亿数据,那训练出来模型准确率会非常高,那么久存在如何去收集数据。
收集了数据之后,如何去对它进行标注。10万张这样级别,我还是可以去通过众包的方式请人去标注,但几百亿张级别肯定是没办法。这时候呢,大家在研究基于机器学习,做半自动的标注,先让机器学习去标注,还有就是通过预训练,预训练是迁移学习的一种表达。比如,我先在IMAGE NET上面训练出来一个模型,然后再用这10万张图片再去训练。未来一个更好的一个办法,可能是通过在线学习,或者是自监督学习的方法。大家注意,我们的一个假设是没有标注数据。没有标注数据,要么就从其他领域迁移过来,要么就是在线学习,通过自监督学习进行标注。比如,你在开车的时候,绝大多数情况都开得很好,突然需要一次人的干预,那这时候机器就会发现,针对某一个处理得不好的场景,能不能进行一些标注。
还有一个,就是嵌入式的部署,因为汽车上面是一个嵌入式系统,而不是一个数据中心,要考虑实时性,模型的大小,计算量等。你可能要对图像进行压缩,无论是downsampling还是encoding。然后,对模型进行压缩,无论是通过定点化,量化等很多方法,通过级联算法,用计算量更高的,但是识别更好的卷积的方法。级联算法可以减少region proposal。;另一个就是多任务网络。在一个层面,一个网络可以检测人车,交通标志,车道线等;那另外一个层面,可以把检测分类和语义分割放在一个网络里面,这样也有利于在汽车上面进行部署。这些都是非常值得探索的新的AI的方向。
第二步就是认路的司机该怎么去做,这里需要地图和定位,传统上,旺旺采用XJBD方法。大家熟悉这种篮球就知道啊,就是通过打乱仗的方法来去解决定位的问题。首先我可以用一个高精度定位的系统,叫RTK。这个系统依靠卫星,地面基站,多个天线做差分计算,去获得厘米级的定位精度。那大家可以看到,这是我们的车,这辆车上有两个蝶蝶形的天线。通过这样一种天线,来获得定位。但是问题是在哪里?大家看这是这个车,这其实是我们拿着传感器,故意歪歪扭扭地走,绝大多数情况下定位非常好。到这里信号跳得非常厉害,因为这个建筑物比较高;换一个时间点,大家可以看到西边信号出现了很多的跳跃,那这意味着什么?光靠这个东西是不行的。
那么,XJBD就要用了,加上新的系统。RTK是提供了一个绝对精密的系统。这里,我们加上视觉里程计,就是记录图像帧与帧之间视觉特征点发生的位移。比如,若是30帧每秒,在这个30毫秒中,特征点发生了位移。而这个位移其实就是你的车的摄像头,或者是整辆车姿态的变化。如果把这些位移记录,且积分,可以实现一个不错的视觉里程计。这一套系统其实在某些场景下是非常有用。这是全宇宙最复杂的立交桥——西直门立交桥,很多GPS是不工作的。若有这么一套系统,你可以做到相对的定位;还有一种场景,大家知道这个视觉特征点是希望在帧与帧之间是静态,即这个视觉特征点本身是不会动。但如果在园子里面,很多树叶它是会动,会导致你的累积误差变大。怎么办?在园子里,每过一点距离,就树两个牌子,其实它是一个视觉参考。这时候我其实已经偏离了道,通过这两个视觉参考物,类似于三角定位,可以重新去做一次定位。

还有一种情况,我们在环境里面贴了一些二维码啊,车辆在行驶时,会时时检测这个二维码来帮助进行定位。刚才我们这个园子里面要树两块牌子。如果我有二维码就非常有用。因为二维码本身它是encode的信息。而且二维码的形状和大小,能够帮助我们能够去了解相对的距离和角度,这个就是XJBD的做法。还有一种方法,就是通过SLAM(同步的建图和定位)。这项技术,历史悠久,有名的无人车先驱塞班斯蒂安特隆,他最早就是做机器人的SLAM。就是利用激光的点云做这么一个SLAM,就是能够同步建立地图,同时进行定位,这是我们的基于视觉的SLAM。刚才说激光雷达贵,我们做一套基于视觉的SLAM,在视觉的特征点非常丰富的情况下,他也能够工作得很好。在地下停车场没有GPS,你需要去导航啊,需要新的技术,我们做了这个基于是视觉的SLAM,基于激光雷达的SLAM,都工作得非常好,能够非常自如地进行行驶。当然了,如果能够把这两种技术结合在一起啊,那置信度就变得更高。我们未来要实现高度的自动驾驶,甚至是无人驾驶的话,是需要高精度地图。假设百度或者是高德能够提供给你高精度地图?那你可以怎么办?
这个是国外一家公司叫Care,他做的高精度地图是什么样子是吧?有很多车道的信息,地面视觉信息以及三维空间里面各种交通标志,车道线,能够帮助他来进行定位,具体怎么做呢?这是我们在没有高精度地图的情况下做了一套实验系统,那他的做法就是在三维空间里检测。你看这个红色的就是检测到交通标志,然后在地图里存了交通标志以及它的绝对位置这种映射。于是,我不断去检测,检测的时候进行匹配,匹配不到,无所谓;一旦匹配到,我建立连线,就知道在什么位置。其实这就是一个假设,若有三维空间的高精度地图,可以利用这种方法进行定位。当然还有一种方法是通过地面的二维,地面上也有非常丰富的视觉特征,我能够把这些视觉特征啊变成一个类似于高精度地图的这样一个数据。这是我实际看到的场景,能够根据高精度地图进行匹配,能够帮助获得横向或者纵向10厘米的定位精度。因此,利用这些地面的丰富的两维视觉特征可以进行定位。有时候,地面上有很多的阴影,只要你的算法足够的鲁棒,也可以定位。当然如果说是矢量化的高精度地图,那可能还要做一些事情,比如要把这个矢量重新渲染成为一个图片啊。然后,把你实际看到的东西跟这个图片,进行比较,定位。
在这一块我们认为未来还有很多的机会。
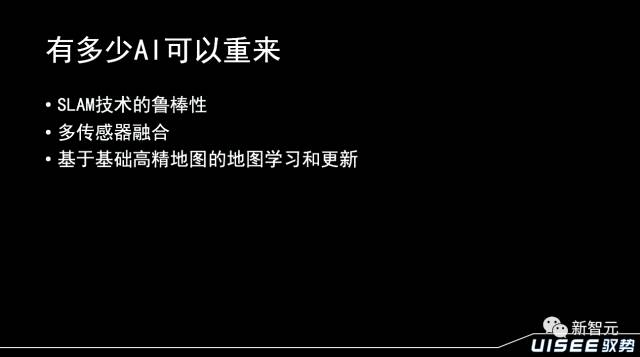
第一,SLAM技如何能够做到更加鲁棒?大家知道SLAM技术由于视觉质量技术,非常受限于在环境当中能够发现的这些特征点,比如说四处都是白墙,是很困难。
其次,多传感器要进行融合,在什么情况下,哪种传感器给出来的数据的可信度是更高,怎么能够把它们融合起来,或者用另外一种传感器来帮助这种传感器?这个融合算法其实也有很多的探索;还有,就是基于基础高精地图不断地对地图的更新和学习。因为四维也好,百度也好,他们可能全国只有100辆扫街的车,因此对于基础地图的更新是非常慢。如果每一辆车,不但具备定位的功能,也能够帮助地图进行更新,那用户始终会拿到最新的地图。这些都是值得去探索的方向。
第三,我们再看老司机要做什么。 为大家看一下我们一个demo,是在一个真实的交通环境当中。上路前,我们在车顶上放了两样东西,打火机,盒子,然后在这个路上面开20多公里,加速、减速、换挡、超车,最后这几样东西还是稳稳地放在地上,这说明老司机的第一步拿到开得很稳,很舒适;二、是开的不肉,具有社会性和竞争性。这时,车不是呆呆的机器,与其他人类司机有互动,尤其在与很多如狼似虎的人类驾驶员竞争路权的时候,要有竞争性。所以,做无人车就像咏春木人桩。大家都看过叶问吧,他就是跟一个静态的一个木人桩在练。但事实上你在路上开是在闯少林18铜人阵。因为驾驶员都会骗你,都会欺负你。这时候,你要更好地去判断路上的态势去评估这些可能是人或动态的物体,评估他的动机,预测他们的行为。然后,合理地获得路权。这时,传统的监督学习就不够。监督学习是我给你一个状态啊,我能够对它进行一个预测,而这个预测,对外界环境是不会有影响的。但是,实际开车的时候,你不断跟环境互动。因此,需要新的学习方法,就是比较通用的强化学习的方法,来去实现跟环境的互动。当然了,这是一个比较广泛含义上的强化学习,这里面可能也包括像马尔可夫决策过程,循环神经网络等。如果,前车上普通掉下来的东西,下面我这个车怎么办?那么它通过一个循环神经网络会去做推理。你看这个东西,在地上弹啊弹,机器就会知道这个东西是有弹性,且质量不会太重。这时,我的驾驶决策可能是轻微的减速,能避开就避开,但不要紧急刹车,或者是串到其他车道去了;而如果前车掉下来一个重家伙,你通过循环神经网络是可以判断出来,你可能只能够紧急制动,对吧?这就是一种通过跟环境的互动方式,去推知其他物体的物理特性,预测他们的行为来去决定我该怎么样。
这是新加坡MIT做的一个工作。这有一辆无人车,在有很多行人的环境里,他就开得非常肉,因为他一看见有人动他就得制动。对吧,所以就开得非常不爽对吧?我们有个同事,当时做了一个工作啊,它其实基于的一个叫OnlinePOMDP ,其实就POMDP,就是partiallyobserved的马尔可夫决策过程。他所谓的online只是让它变得更快。那么这时候呢?他会track每一个行人,他是怎么动,然后通过MDP马尔可夫决策过程,去预测下一步的行动轨迹,会不会跟这个车相交。如果不相交,那我就不用刹车了。当然,其实这里面有一个理想化的假设,就是说每一个人的行为是符合马尔可夫过程特性的。所以马尔可夫是指,你是下一个状态完全取决于当前的状态和你这个action。但事实上,在开的时候,其实你的下一个状态取决于很多其他的司机,他是一个multi-agent的环境,这样,用简单的马尔代夫过程就不行了。
这时候就需要更好的强化学习。比如,汽车要环岛。那么大家可以看到它怎么做的?就是这辆车露出一个头,然后去试探这边的车,看他加速还是减速。加速的就是比较猛的司机,那我惹不起,就停下来。然后再往前凑一凑。这种深度强化学习,从某种意义上来说,AlphaGo下棋与开车是类似的。当他看到了整个盘面黑白局面,来决定下一步怎么下。那开车呢?其实也是根据对方司机的行为来决定我下一步怎么办。
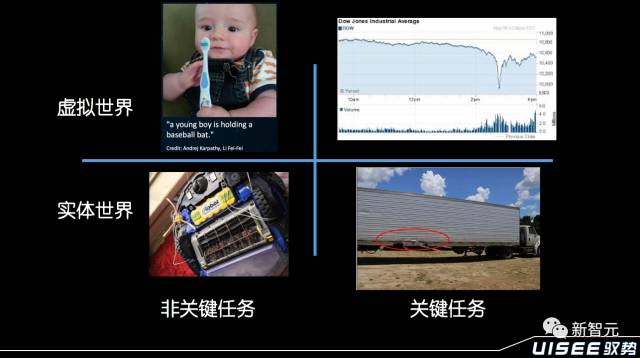
那么老司机的第三部分呢?就是怎么去处理未知的情况,能够开得万无一失。这里面涉及到的是人工智能的鲁棒性。我们把人工智能分成这四象限,上面是虚拟世界,下面是实体世界,左面是非关键任务,右边是关键任务。大家看,这是李飞飞他们做的工作。这是一个小男孩拿着一个棒球棒,这很显然是识别错了。但是在虚拟世界非关键任务上问题不大,对吧?但是如果说,在虚拟世界的关键任务,比如金融这个领域,一旦出错,就会出现千亿美金市值突然消失这样一种场景,对吧?我们再看实体世界非关键任务,一个扫地机器人。它做得不好吗?线都缠在一起也没关系。但是,在实体世界的关键任务上,像自动驾驶一旦出错就问题很大。那么汽车上面的可靠性和鲁棒性非常重要。大家知道吗,一辆奔驰S级轿车,上面的代码量是波音787梦想客机代码量的16倍。大家可以想见,要对一辆车进行很好的测试,要求非常高。但事实上,比代码更难的是数据和上面的随机算法机器学习。假设两辆车出厂的时候是一样的,一辆卖给了雷鸣一辆卖给了我,但开了一个月以后,这两辆车行为完全不一样。机器学习意味着根据给它的训练集来学出一套东西,如果训练集给的不好,那是会出问题的。谷歌做了一个比较有趣的工作,它训练了一个神经网络去识别哑铃,训练出来了以后它把这些特征可视化出来,结果发现它生成的哑铃都带着一条肉色的东西。研究人员百思不得其解,后来一看输入集,都是肉色的胳膊,所以它认为哑铃都是带着这条胳膊的。

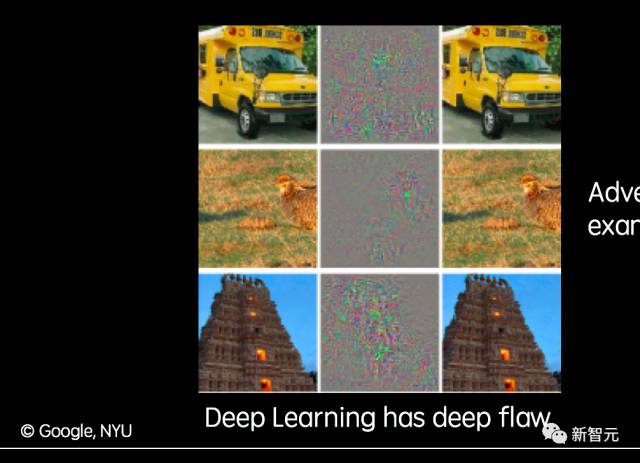
又比如侠盗猎车手,这样一个赛车游戏,原来是人在开,现在呢?是用AI去开,去训练你的模型等等。另外,深度学习就是黑箱,不知道为什么,他就工作的那么好,但有时候,他就莫名其妙的会出错误,按照周志华老师的说法,他说我们人类犯错误的时候,一下子会从九段变成八段,而机器学习如果犯错误,一下子从九段就变成了零段。那么这时,事实上你不可能把你的生命交给这么一个东西。我们再举一些例子,谷歌做过这么一个有趣的实验:左边那个图跟右边那个图我们人眼看上去是一模一样。事实上,它们在像素级别上有些差别,这些差别不足以让我们人眼做错误的判断。但是呢,机器学习能认出来这是校车,但认不出来,这个也是校车。现在我们把它叫做对抗。这些案例,能够帮助机器学习的引擎优化。人们会造出一些东西,来欺骗深度学习,比如说这个东西,我们肉眼看上去啥都不是,但是深度学习认为它是一个猎豹。而这个东西呢,深度学习把他认成了帝王棋了。
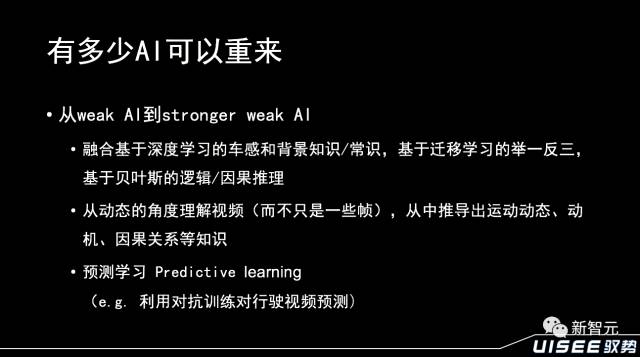
大家也开创出一些新的方法,比如说生成性的对抗网络。一个是生成器,给你造出来一些假图片,另外一个是辨别器,他能够去分辨哪个是真哪个是假。所以,下一阶段,我们说今天我们的智能驾驶的人工智能都是weakAI,那么10年以后,我们也不指望它能够变成strong AI,或者是称为artificial general intelligence。只是希望它能变成stronger的weak AI。比如说深度学习,尤其是端到端的深度学习,它学习出来的是一种车感。而这种车感不足以让你能够开好车。它有时候可能需要跟背景知识和常识结合起来,比如说我们人开车的时候看到那里有一个停车位,但我竟然没有把车停过去,深度学习系统是学不出来这个道理的,因为人的背景知识是,看到这个车位的两边一辆是宝马,一辆是奔驰,我还是离他们远一点好。所以这种深度学习需要跟背景知识和常识结合。还有,它需要跟迁移学习结合起来,举一反三,触类旁通。还有,比如说基于贝叶斯的逻辑因果推理,能够使得我们的自动驾驶系统变得更好。还有,今天我们看自动驾驶的问题,往往是把一个视频拆成很多的帧,在每一帧上进行检测进行判断。那么,另外一种思路是从整个视频的连续过程的角度去看这个问题,能不能从这个连续的过程当中推导出动态、动机、因果关系等等知识。还有一个就是现在也很火的,大家知道YannLeCun,他原来把机器学习分成3类,强化学习、监督学习和无监督学习。然后他现在调整了一下,分成新的3类:强化学习、监督学习和预测学习。他把预测学习作为无监督学习的一种最重要的方法。事实上,现在已经出现了新的方法,通过预测视频当中下一帧长什么样来进行增加。其实我们人在做任何事情的时候,无时无刻都在做预测,比如说大家回家,肯定有这样的经验,你走进门,进电梯,按电梯到顶层,基本上都不太经过你的脑子。它不断的通过一个预测系统在工作。然后你出了电梯去开门,感觉抓空了,这时候预测失败。唉,这时候你发现原来提早出来了,对吧?所以说这种预测越来越重要。
最后想说一下穿过AI落地的迷雾。现在我们看到很多人工智能做出来,Demo非常好,但是它离真正落地,离部署其实有很长的道路。做demo的话,你100次当中有1次成功就行了,把成功的视频放在网上,大家都觉得很牛,对吧?那么你真正部署了以后,100次当中有1次失败就完蛋了,对吧?而且,你拍demo时可以在车上装6个、9个激光雷达都无所谓,但是真正落地的话成本就变成了考量因素。而且你不仅仅要考虑车,还要考虑基础设施,考虑整个运维的系统。另外,从算法能力到系统能力,你算法做好了,下一步要考虑鲁棒性和实施性,但更重要的是软硬件的垂直整合。我和雷鸣有一个共同的朋友叫李志飞,他一开始是在微信里面做了一个出门问问,是吧?一开始全是算法人员,结果他发现这个东西没办法变现。他说我还是做一个终端吧,于是做了一个手表,然后又做什么后视镜,结果慢慢地他公司里做算法、做人工智能只占一小部分了。大部分的人都在做软硬件垂直整合。另外,就是对需求和场景的理解。大家知道,今天我们所有的人工智能都不是通用人工智能,都需要针对特定场景和需求去适配你的人工智能。

最后我想说的是,对于爱车的人也好,极客也好,算法系统的工程师也好,其实智能驾驶是一个非常非常sexy的工作。这也是为什么我们要去做这么一个工作的原因。我们希望能够建立一个非传统的经营合伙人公司,聚集全球的创业精英,能够为他们赋能,能放大他们的才华。为11亿人交付安全舒适低成本的智能驾驶技术产品服务。我给大家看一下,最早我们是从车库开始创业的,我觉得做智能驾驶,你一定得从车库开始创业。我们的工作环境当时是非常艰苦的,但是现在我们的环境就好多了,变成办公室了。当然,这里面有各种各样的车是吧?可以看到我们做了很多种车,像这样的一些低速的车,像这样一些高速的车,而我们的办公环境也非常有意思,你有各种各样的工具,我们的环境我们的办公室里面还有篮球场,然后你可以去动车。我觉得这对于很多人是很有意思的,对吧?特别是男孩,小时候开始就有一个对汽车的热爱,所以你现在可以自己去动车了,让我们能够把我们的代码收到这个车里面,大家可以看到,这是我们在路上去测试我们的代码,那么我这个代码更新了以后放进去,你就会发现它开的更好了,这种成就感是非常强的。这套系统实现了100公里时速无人驾驶,它自己还有超车的功能。大家可以看到,如果前车开得太慢了,太肉了,它可以非常敏捷的拐到快车道上漂亮的操作,然后再回到中间车道上。
这是我们的另外一个研发基地,大家可以看到我们做的车,在这个研发基地里面整天的跑。这种车的使用场景非常简单,用手机把它叫来,告诉它去几号,它就把你送过去了。当你的代码,能够让这些车显示出来灵性的改变时,成就感非常大。这个小车也很有意思,我们直接买了一辆老年代步车,然后改装了它。在这辆车上,我们做了一个很有意思的功能,我们希望它们不仅无人驾驶,而且无人维护。所以,我们在这上面做了一个自动充电的东西,当它发现自己没电的时候呢,它会找到一个带有无线自动充电功能的停车位,以一种非常准确的姿态,停进去就开始充电。

然后,我们的下一步要往上走。我们想设计我们自己的车,最早的灵感是从这张熊猫照片来的,然后我们就做出来了这个车的缩微模型。然后,我们就把真的车做出来了啊。大家知道,我们公司才成立了一年,就把这个车做出来了,大家可以看到它跟我们原来的车的不同之处在于外面看不到线,看不到露出的传感器,所有传感器都隐藏在车身里面,而且,车前面有一个led显示屏,负责跟行人跟环境当中的其他车辆进行交互。因为今天我们车这边有一个驾驶员,他可以跟行人进行交互,比如说挥挥手让你经过。而现在呢,完全通过视觉语言来去做。这个车里面变得非常的简单,大家可以看到,里面是木地板,一个L型的半环形的沙发,后面有个红色的按钮,是紧急刹车,然后前面有一个大屏幕,大家传统上看到车里面的一些仪表盘、各种操控设备都没有了。
这是从车子后面往前看,我们还有一个摄像头,可以视频会议可以玩直播,对吧?现在直播很火。这是从侧面看进去。很多媒体给它取了名字,像什么移动包厢啊,移动吧台啊,确实挺像,是吧?
好,这是最后一页,我觉得引用一下咱们钱穆老先生的话:要认识你的时代,带领你的时代。我觉得真正要做到这一点是不容易的。一定不是一个人在战斗,一定是跟先行者同行,跟开创者共创。未来呢,也希望能跟在座的或者是线上的有些同学,一起去开创这么一个大场面。好,谢谢大家!
雷鸣对话吴甘沙:如何评价英特尔收购Mobileye?

经济学人首个无人驾驶特别报告: 你能获得自由, 但要付出代价
和传统汽车曾经改变世界一样,自动驾驶汽车也会改变世界。汽车时代曾经犯下的错会是这次变革走在正确道路上的宝贵经验。译文有删节。
编译 | 微胖
来源 | 经济学人
重新发明轮子
每天,约有 1 千万人使用 Uber。这家公司正让叫车服务在全球 82 个国家、600 多个城市变得越来越常见。
但是,在匹兹堡寒冷的冬天早上,跑在路上的那辆沃尔沃 XC90 并不是一辆普通的 Uber 用车:
座位之间的触屏正显示着车辆周围的情况,比如行人、车辆和骑自行车的人。点击触屏并告知你的目的地,沃尔沃会自动出发,没有司机(坐在驾驶员座位上的是实验人员,不是司机)。这是一辆自动驾驶汽车。
汽车甚至知道匹兹堡当地的驾驶习惯——「匹兹堡左」:即使绿灯已经亮了,汽车仍然会礼貌地让对面汽车左拐。
自动驾驶汽车与人类司机最大的区别在于,它并没有努力躲开路面上臭名昭著的坑,时而颠簸。测试员有时会接管车辆,比如指引汽车通过最近道路标志线有变的施工地点。
虽然自动驾驶汽车并未完全准备好取消人类监督。但近些年来,自动驾驶技术进展迅速。如今,已经可以在几个美国城市道路上看到这些汽车。
在匹兹堡和凤凰城,Uber 的自动驾驶汽车正载着测试员运行着。Waymo 更进一步,在凤凰城的一个郊区 Chandler 测试驾驶座上都没有人的小型货车。
公司计划在今年提供商业叫车服务。而美国最大的汽车公司通用汽车希望于 2019 年用雪佛兰 Bolt 提供自动驾驶汽车服务,这些车甚至没有方向盘和脚踏板。
在硅谷和匹兹堡这两个主要自动驾驶中心,也可以见到科技巨头、创业公司和汽车制造商们运行的自动驾驶汽车。
在世界其他地方,自动驾驶交通工具也在大学校园、商业园区运行或沿着特定公交车道提供服务。就连 1 月份的 CES 都被自动驾驶车辆抢尽了风头。突然,似乎每个人都开始随大流了。

计算机视觉和其他机器学习系统近期取得的进展是一个原因。从芯片制造商到软件公司,科技人士都认为自动驾驶会是一个利润丰厚的新兴市场。
Uber 和其他叫车服务的兴起让汽车行业认知发生了巨大变化。汽车制造商意识到需要认真对待自动驾驶汽车,因为它们会重塑整个产业。
自动驾驶技术和叫车服务的结合,以及电动汽车转向也会改变许多人拥有自己汽车的所有权逻辑。发达国家的叫车服务费用约为每英里 2.5 美元,而自己开车每英里成本为 1.2 美元(见图表)。
但是,司机成本占了叫车服务成本的 60%。投资银行 UBS 预测,自动化、竞争和电动化(虽然购买不便宜,但是运营起来会便宜不少)会削减掉 70% 的叫车服务成本,降到每英里 0.7 美元。
所以,一个典型美国家庭每年里程约为 1 万英里,如果使用自动驾驶汽车的出租车服务,每年可以节省 5000 美元。另外也有一些其他好处,比如喝多了,你的孩子也能帮忙开车。
一旦汽车变成自动驾驶汽车,汽车所有权也会发生实质变化。UBS 预测,2025 年后,自动驾驶汽车会迅速起飞,到 2035 年,80% 的人会使用它们。
BCG 预测,到 2030 年,美国公路四分之一的乘客周转量都会变成共享的自动驾驶电动车服务,城市汽车数量会降低 60%,尾气排放量降低 80%,交通事故降低 90%。
尽管一些人希望拥有自己的车,但是一半的自动驾驶汽车将用于叫车服务。全球看,自动驾驶汽车和叫车服务融合带来的「乘客经济」规模将达 7 万亿美元,一家咨询公司 Strategy Analytics 说。
汽车制造商、科技巨头、创业公司和叫车服务公司已经开始竞争。汽车制造商虽然懂造车,但是对复杂的软件所知甚少。技术公司知道机器学习和计算机视觉,但是不懂造车。叫车服务公司的应用程序装在数以百万的用户手机当中,显然提供了切入市场的路径。所以,我们就看到了图表中各种混搭风格的合众连横。(见图)。

英特尔买下了 Mobileye。通用汽车买下了 Cruise, 成立了 Maven 并且投了 Lyft 5 亿美元。福特解雇了自己的 CEO,部分也是考虑到公司在自动驾驶领域的落后。
现在,公司投了 10 亿给 Argo,也与 Lyft 联合起来。德尔福收购了 nuTonomy 并更名 Aptive。Uber 也同意从沃尔沃购买 24,000 量自动驾驶汽车,并与戴姆勒合作。
戴姆勒已经收购了 Uber 在欧洲和中东的竞争对手,也拥有自己的叫车服务。欧洲最大的汽车制造商大众则与 Aurora 达成交易,等等。
总之,技术板块与汽车制造板块正在彼此撞击,引发地震。这一变革既会改变其这些行业,余震更会产生深远影响:自动驾驶汽车会成为像智能手机一样的变革之物。
手机重塑了 20 世纪的世界,无论是在好的方面还是坏的方面。自动驾驶汽车也会改变人类的生活、工作与娱乐。
在城市规划中,自动驾驶汽车会是一个解决许多难题的大机遇。如果在 20 世纪,汽车赋予人类行动自由,那么 21 世纪,自动驾驶汽车会赋予人类独立于汽车的自由。
但是,正如汽车带来了负面效应,自动驾驶汽车也将引发关于安全、网络安全、责任与公平的担忧。
本期《经济学人》的专题报告会假设通往全自动驾驶的技术障碍都会被克服。文章将讨论自动驾驶汽车对以下各个方面的影响:个人出行、汽车产权以及汽车制造,也会讨论更为广泛的给社会经济和文化造成的连锁影响。
我们的日常生活如何被重塑?自动驾驶汽车会重塑城市吗?二十世纪汽车崛起引发的教训,有哪些值得 21 世纪的自动驾驶汽车吸取?
出售的是乘车服务,而不是车辆本身
如果想购买一辆属于自己的自动驾驶汽车,估计要等下一个十年了。
自动驾驶汽车首先会出售给出租车队运营方,而不是个人。主要原因有两个:
首先,激光雷达传感器仍然很贵,会比车辆其他部分成本的总和还贵。对于车队来说,价格贵不是个太大的问题,因为车辆在整天的运营过程中会有收益。
第二,如果运营地理区间限定在精细地图所涉范围内 (比如城市中心),在保持自动驾驶车辆的安全和可靠性方面,车队会更加适合。
所以,你的首次自动驾驶体验,可能来自叫车应用,而不是自行购买的车。
目前,Waymo,Uber、Voyage、Navya 等都在尝试运行自动驾驶汽车的出租车服务。BCG 的 Nikolaus Lang 预测,大规模的部署最有可能始于部分城市地区中有地理围栏的出租车服务,比如新加坡或迪拜,接下来几年会扩展到其他地方。
要想自动驾驶汽车便宜到个人买得起,并能在预定好的、有地理围栏的区域内运行,估计是许多年以后的事情了。
而与此同时,便宜的出租车服务或许会让许多都市人放弃汽车所有权。自动驾驶技术和叫车服务的结合,让许多汽车制造商的「自身商业模式面临最为深刻的挑战。」一份近期的 BCG 报告指出。
这也是我们看到汽车制造商正涌进叫车服务领域,推进自己的自动驾驶项目的原因。
未来,汽车的所有权只是一个可选项,出售的是搭乘服务而不是汽车本身。
这一变革给汽车制造商们带来巨大机遇。
如今,全球汽车制造市场规模约为 2 万亿美元,而个人出行市场规模则高达 10 万亿美元。
不过,这也让这些汽车制造商们面临新的竞争对手,比如科技公司和叫车服务公司。一些汽车制造商们推出了自己的出行服务,而其他公司更愿意扮演车队管理人(fleet managers)的角色,为出行服务运营商们提供「产能」,并根据公里数收费。
还有一些汽车制造商们甚至打造「白标(white label)」车队,它可以包装成某个城市或叫车服务网络的自动驾驶服务。
自动驾驶汽车的出租车服务预计产生的收益会吸引到机构投资人。
因此,将自身转变为汽车资产管理者会是汽车制造商们一个合乎逻辑的选择。而事实上,这些制造商们的融资部门也已经涉入了车队管理领域。
对于用户来说,定价模式也会发生变化。
Uber 已经在一些城市尝试类似通信行业的月付计划,以某个固定价格享受一定次数或里程数的出行服务,就像以一定价格享受一定量的电话、短信和数据流量服务。
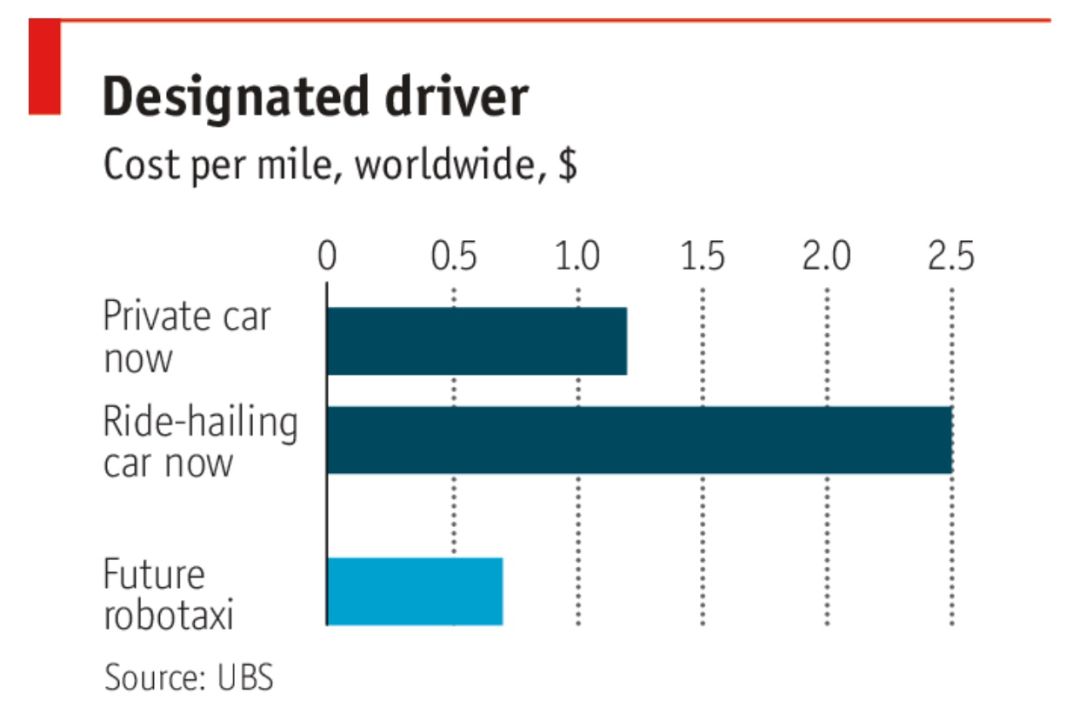
目前,全球汽车销售量约为 8 亿辆,而自动驾驶汽车会给这一销量带来巨大影响。由于 95% 的时间都处在未被使用的状态下,将这一情况转变为共享出行服务会极大减少路上的车辆数量。
UBS 预测了到 2030 年,全球车队的规模情况(见下图)。但是,如果自动驾驶车队在 50% 的时候都处在使用中(而不是 5%),那么这些车的更新频率会更高。
因此,除非汽车的「生命周期」能被大幅延长,否则,每年所需新车数量会呈上升趋势。
但是,特斯拉的量产问题已经表明,在大量生产汽车的同时,确保汽车可靠并不是件容易的事情。
这些汽车制造商们多年来拥有的核心技术就是优异的制造技术,所以,即使在自动驾驶汽车的时代,一家汽车制造商仍有大买卖可以做——只不过与今天的生意有所不同:
做了 100 多年的硬件,如今也需要严肃对待软件和服务了。而这意味着新的人才、收购和合作。
自动驾驶汽车也加速了向电动汽车的转变,而电动汽车所需的组建和组装线工人更少。
发生变化的不仅仅是汽车制造商,还有汽车本身。
自动驾驶汽车看起来和普通汽车无异。但是,如果不需要方向盘和脚踏板,自动驾驶汽车的外形和大小可以有更多的想象空间。
大众公司的 Sedric 和 奔驰的 F015 呈仓状,乘客可以面对面坐着。
未来,自动驾驶汽车或许应该有一些隔离的空间,这样才能鼓励人们与陌生人共享出行服务,而家庭成员出行可以订阅不同设计的车辆——家人可以坐在一起的那种。
不过,所有这些对于汽车经销商来说,都是坏消息。
如今,很多经销商已经很难赚到钱了,它们主要是通过汽车金融和服务中获取利润,因此即使汽车产权的微小变化也会给它们带来重创。
汽车修理厂和零部件商也会受到影响。如果自动驾驶车辆降低了汽车事故量,一些汽车部件供应商们会将自动驾驶汽车视为未来盈利的威胁因素。
而保险商们也会因所有权和事故数量的降低而受到影响。医疗保险和个人伤害赔偿案件代理律师也会受到波及。
不过,最直接受到自动驾驶服务影响的是那些开出租车、送货车和卡车的人们。
我们已经可以看到,接下来几十年,自动驾驶汽车将引发汽车产业及其相关产业巨变。但其后续影响去不会仅仅止步于此。
就像若干年前诞生的汽车一样,自动驾驶汽车也将对文化和社会产生深远影响,而影响最明显的地方就是城市。
城市规划:新的乌托邦
如果你是一辆汽车,美国是个很棒的地方。现代城市,特别是美国城市拥有大量公路和停车空间,是属于汽车和人类的城市。
自由驾驶汽车去任何地方,路上没有拥堵,将车停在目的地——这些期望指引了 20 世纪的城市建设。高速公路、通勤郊区以及强制性停车要求等设计改变了城市。
如今,自动驾驶汽车会再一次变革曾经以传统汽车为中心的城市建设设计。
「十年来,第一次有机会去反思城市发展。」MIT 城市研究教授 Alan Berger 说。
简单围绕车辆来设计城市,不仅会带来拥堵,还会影响人们对公共出行服务的使用,让一种毫无计划的扩张蔓延,所有这些都是城市规划者无法接受的。
而吊诡的是,自动驾驶汽车要么会反转这些趋势,要么会加速它们,这取决于使用规则,特别是定价体系。
由于自动驾驶汽车随时清楚自己所处位置,因此,采用细颗粒度的道路收费机制,根据一天时段、路况等收取拥堵费,会容易许多,这也能够将自动驾驶车辆变成一种强大灵活的政策调控工具。
先看交通堵塞问题。
转型自动驾驶汽车会提升汽车占有率,减少汽车数量并缓解交通堵塞。但是,低成本的自动驾驶服务也会鼓励更多的人更多地出行,这就是我们熟悉的「诱导性需求」,如果出行成本低又方便的话。
如此以来,路上到处都是自动驾驶车辆却不见乘客。最糟糕的情形莫过于我们创造了另一种形式的交通堵塞——自动驾驶汽车的拥堵。
但是,认真的出行定价会防止这一现象的发生。
有些城市已经有了不同种类的针对拥堵的收费策略,或鼓励汽车共享的规则,比如专属的共享车道。有些机构会针对使用路边停车处进行收费,比如机场。
自动驾驶汽车让更多不同形式的收费模式成为可能,比如考虑时间、地点、车辆类型、乘客数量、路况等,以最大化共享服务同时最大可能降低拥堵。
会对公共出行系统造成什么样的影响?
UC 戴维斯分校的一项研究表明,Uber 和 Lyft 的兴起让公共汽车的使用率跌了 6%,轻轨使用率降低了 3%。自动驾驶汽车会更加便宜,所以会让使用公共交通系统的出行的人数减少。这或许会影响公共交通建设的投资,进而引发更多的「捷运沙漠(transit deserts,意思是指公共交通服务不足的地区——译者注),结果,大量出行依赖公共交通系统的居民(特别是穷人和老人)所能享受到的服务却供给不足。
自动驾驶汽车的叫车服务最适合人口密集的城市中心。但也有一个更加乐观的设想:
使用自动驾驶汽车解决「最后一公里」的难题,这样,在人口不那么密集的地区,公共交通系统也会更加方便可用。一些城市已经运行了自己的自动驾驶车队。
自动驾驶汽车的兴起也有望与城市结构改造同步。
如今,许多欧美大城市的工作岗位正从市中心流向边缘地带,从一个郊区前往另一个郊区(而不是市中心)上班的人数也越来越多。
那些拥有密集的公共交通网络系统的欧洲和亚洲国家,很容易应对这种去中心化趋势,但在美国,对基础设施进行改造的成本会非常高。而自动驾驶汽车的叫车服务非常适合用来解决这一问题,成本也是可以承受的。
这也会导致城市扩张。一方面,城市居民转向叫车服务也会导致城市人口更加密集,因为现在用来泊车的区域会让位给住房建设。与这种新的高密度住房配套的还有乘车与落车地带的规划,泊车空间会更少。
另一方面,自动驾驶汽车也会鼓励城市扩张,更远距离的通勤也会变得可以接受,因为乘客可以在移动中工作和休息。不再亲自驾驶,城市中心也更加容易出入,自动驾驶汽车会增加城市生活的活力。
由此看来,自动驾驶汽车会让城市更加密集也更加扩张,这取决于道路收费机制。
自动驾驶汽车也有可能让建立新型郊区成为可能。如果说过去 100 多年来,汽车显著改变了我们的风景,那么,我们曾经交给车辆的风景可以被返还给生物系统。
比如,给植物更多的土地。生物多样性、更好的土壤保水性将降低城市中心的洪水风险。
最终,城市中心也会有所不同。城市已经储备了许多宝贵的不动产,以停车场、车库等形式。如今,它们必须决定如何使用这些意外之财了。住房建设会是一个明显的选择;公园是另一个。一些街道可以重塑,增添更多具有想象力的用途。
20 世纪,由于缺乏合理定价体系,汽车革命带来的许多问题。
今天,只要在城市与交通系统的建构方式上,赋予城市规划者与政策制定者更加广泛的选择,我们就可以借由合理定价,让自动驾驶革命避免曾经的弯路。而挑战在于,如何明智地加以选择。
一个不同的世界:可见与不可见后果
购物中心、高速公路、飙车、路怒症...... 汽车以未曾预料的方式改变了我们的世界。给予无数人行动自由的同时,我们也付出了沉重的代价。
从事自动驾驶研究的人士认为,这项技术的主要好处就在于减轻这些代价,特别是道路交通事故、污染以及堵塞。
特别是,自动驾驶汽车可以极大降低交通事故中的死伤数量。
已经有相关证据证明自动驾驶汽车更加安全。Waymo 已经在公共道路上行驶了 400 万英里,仅涉及过由驾驶其他车辆的人类司机引发的事故。自动驾驶汽车拥有超人般的感知,可在毫秒之间刹车,而人类的反应速度约为一秒左右。
但是,「比人类更好」也是一个比较低的标准。人类已经准备好容忍人类司机引发的死亡,但是自动驾驶车辆必须多少永远正确。
一个比较现实的目标是将人类司机水平提升千倍。这会将美国每年交通事故死亡率从 4 万起降低到 40,相当于 1900 年的水平。
如果可以实现这一点,我们的后代回顾历史,会觉得人类驾驶汽车简直就是反常。
为了充分利用低得多的运行成本,几乎所有的自动驾驶车辆都会是电动的,这也会降低两类有害气体的排放:悬浮粒子和温室气体。
不过,自动驾驶汽车是否会降低交通拥堵,远不够明朗。
20 世纪的教训是,想通过多修路解决拥堵问题,反而鼓励了更多汽车出行。
如果自动驾驶汽车够便宜也方便,那么,人们使用这种服务的次数也会更多。然而,我们有理由认为道路不会那么拥挤。
因为广泛使用叫车服务会让道路空间的利用率高效的多;计算机控制的汽车很善于路线规划;而且,一旦被广泛采用,这些汽车能够比现在人类驾驶的汽车以更加近的车距共同行驶,增加道路容量。
然而,将自动驾驶汽车视为汽车制造出的问题的终结者,会有落入历史窠臼的危险。当汽车被发明时,人们也曾将之视为解决马车引发问题的妙方,比如越来越多的马粪和马尿,以及马的尸体和传播的疾病。
如此看来,汽车更加清洁和卫生,这也是 20 世纪人们迅速采纳汽车的关键原因。
此外,汽车变革了零售业,催生了拥有许多商店和停车场的郊区购物中心。自动驾驶汽车和电子购物,将再一次变革零售业。
「未来,沃尔玛或许就是一个车队,可以出售你能在实体店里买的任何东西。」维吉尼亚大学的 Peter Norton 说。或者你可以叫一辆自动驾驶汽车带你回家,上车后安排买菜或去哪里吃饭。
而且商店、餐馆或其他公共设施为什么非要固定在一个地方呢?咖啡店或者小吃摊可以在某个中央仓库补货,然后再在早上深入到街坊邻里,晚上再开往娱乐设施集中的地区。出售鞋子、衣物和化妆品之类的移动商店可以定期拜访特定居民区,或招手即停。
汽车制造商正在测试可以停在消费者家门外的送货车。短信通知用户车到了,输入代码即可从一个锁定的隔间领取购买的东西。自动驾驶技术的低成本送货服务的采用,会刺激本地各种东西的生产,特别是食物。
另一种可能性在于,餐饮和零售可以负担路费,鼓励客户的大驾光临。
自动驾驶汽车也会提供其他服务,在去往办公室的路上健个身或者请理发师登门服务。而且,自动驾驶汽车可以催生新的社交形式,比如为青少年提供新的社交机会。
共享网络也会人以群分,根据相似的兴趣分配乘车服务。自动驾驶汽车还可以作为移动聚会场所,或者长途旅行的睡眠仓,作为酒店和低成本航线的替代选择。
但也必须留意意想不到的后果。
一个是自动驾驶汽车会给予那些不能开车的人以自由和独立:比如老年人、未成年人和残疾人。但是,自动驾驶汽车也会侵蚀人们的隐私。
如果人们不再驾驶汽车,后果之一可能会引发新形式的隔离。另外,自动驾驶汽车也会引发器官捐献的短缺和烟草销量的下降(在美国,加油站的香烟销量占了全部销量的一半)。
如果汽车不再是独立与自我定义的象征,那么,其他东西会取而代之。自动驾驶汽车将改变日程生活的基底,就像传统汽车那样。
新的道路规则
规制复杂新技术很难,特别是演化迅速的新技术。
自动驾驶技术已来,政策制定者应该做些什么,以确保这种新技术能够安全、平滑地到来并兑现承诺?
政策制定的直接目标应该是,在确保自动驾驶汽车安全的同时不会抑制创新。美国许多州都允许处在实验阶段的自动驾驶汽车上路,公司承担相应的法律责任。
Auroa 的 Chris Urmson 认为,与这些自动驾驶汽车公司密切合作,发布指导纲领而不是制定严格的规则, 监管者的做法是对的。
「在没有真的可以加以规定的事情之前,没有大跃进到严格规定,这很重要。」
而在光谱的另一端,新加坡政府已经为迎接自动驾驶汽车的到来做出了最实际的支持。
比如,政府推出了「驾驶测试(driving test)」,自动车辆必须通过这种测试方能上路。虽然这并不意味着安全保证,但却设立了一个最起码的标准。
美国波士顿也有类似规定,要求自动驾驶车辆进入更为广泛的地区之前,接受小范围区域的测试。
其他地区,监管方已经允许在公共道路上进行有限的路测,虽然他们是想了解一下自动驾驶车辆有多安全,但是简单的里程积累无法证实车辆安全。相反,监管者应该与汽车制造商和技术公司讨论,定制新的安全标准。
这就像新药研发。首先,在实验中证明这个药物可行。然后进行临床测试,最后向主管部门申请判准药物推向市场。
目前,自动驾驶正处在临床测试阶段:针对真实用户,测试技术的安全性和有效性。但仍未走到最终的审批阶段。
自动驾驶汽车的审批会是什么样子呢?最终,审批意味着有一份正式证明:车辆具有完全自动驾驶功能,可出售给用户。
但一开始,审批的对象可能是某个自动驾驶出租车队的运营方,而不是汽车供应商。因为运营方可以密切确保和维持车辆的安全性。
即使是新药,也无法确保百分百安全,但因为利大于弊,我们仍然值得冒一冒险。对于自动驾驶汽车来说,情况是一样的。毕竟,人类驾驶也不是没有风险。
我们还可以将自动驾驶技术与飞机进行类比。
飞机的「黑盒子」数据记录以及测试,已经让飞行运输有了长足进展,尽管仍会发生空难事件,但是乘客知道飞行的安全性是被严肃对待的。
实际上,美国国家交通安全管理局(NTSB)已经将飞行运输中的专业知识运用到了自动驾驶车辆中。
不过,在很多方面,自动驾驶车辆的情况比飞机要更加复杂,因为车辆行驶时周围有很多正以无法预知的方式运动着的事物。
然而,无论是药物还是飞机都有全球性(至少是区域性)的监管标准,而自动驾驶汽车没有。随着技术逐渐被广泛采用,目前拼凑性的规定也要进一步简练。另外,保险问题和法律责任也要设计出来。
Mobileye 的 Ammon Shashua 对目前相关规定的不确定性表示担忧。如果全自动驾驶汽车卷入一场致命车祸,整个产业就有可能陷入这种法律上的不确定状态,也可能会因此毁于一旦。
他提出了一套帮助界定汽车在 37 种场景下(NTSB 的事故数据库中),该如何做出回应的规则,并希望这些规则能够被采纳成为行业标准。它们可以将汽车制造商从软件的道德两难选择窘境中解脱出来,在其他方面进行创新。
这可能是一个好的开始。没有一套标准,每家公司就会以各自的方式将为人类设计的道路规则翻译到代机器遵循的代码中。
除了监管,还有政治上的坎儿。
看来,对自动驾驶汽车的抵触是真的。一份调查显示,64% 的美国人对与自动驾驶汽车分享公路表示担忧。另一个由皮尤进行的调查显示,56% 的美国人表示不会使用自动驾驶汽车。

如何建立公众信任,对于推行自动驾驶汽车来说,是一件非常重要的事情。
在自动驾驶汽车比较常见的城市,人类司机已经比较习惯了。Uber、Waymo 等已经开始在某些地方提供自动驾驶出租车服务,最初几十秒,乘客可能会感觉兴奋,但接下来他们可能就会觉得很无聊了。
但这也意味着,乘客感到安全。
假设公众信任了自动驾驶汽车是安全的,监管者仍然要面临第二个挑战:设定运营方式和地点,以及与其他出行方式的关系。良好的定价,在理论上,能够实现控制交通拥堵并提升大家享用服务的公平性。
想要鼓励市民使用自动驾驶出租车服务的政府可以走得更远些,控制私家车的使用(伦敦、米兰、新加坡和斯德哥尔摩等城市已经这么做了)或禁止它们进入某些区域。
但是,这种做法可能不会受到欢迎,不仅仅是车主。自动驾驶车辆应该被视为一种奥维尔式的技术,就像一种社会监控的工具。
反对者或许会站在自动驾驶车前拦住它们,阻碍交通。但是,这也会引发将自动驾驶汽车的车道栏起来,对于那些非机动车辆行人来说,这样的城市街道比现在的更不友好。
但是,不加管制的让自动驾驶汽车都涌上街道,也会有问题。价格战会让车辆涌上道路,让交通更加拥堵。
无论是出行方式的设计还是定价,本质上都属于政治问题。但是,一个城市要解决这些问题需要考虑自身经济和政治因素。在这个过程中,以下两个原则会帮上忙。
首先,在整个交通系统的背景下考虑自动驾驶,搞清楚期待新技术扮演的角色。比如,是特定区域的首选出行方式,还是解决「最初一公里」的办法,作为其他出行方式的补充。
其次,留意各种自由之间的平衡。虽然自动驾驶有望让人类不再自己开车,不再面临拥堵,污染和泊车的难题,但这些都是以让渡出某些自由为代价的,比如开自己的车想去哪儿就去哪儿的自由。在一个自由的国家,自动驾驶能够被接受的前提是,除非人类认为它增进了自由,而不是削减了自由



人工智能赛博物理操作系统
AI-CPS OS
“人工智能赛博物理操作系统”(新一代技术+商业操作系统“AI-CPS OS”:云计算+大数据+物联网+区块链+人工智能)分支用来的今天,企业领导者必须了解如何将“技术”全面渗入整个公司、产品等“商业”场景中,利用AI-CPS OS形成数字化+智能化力量,实现行业的重新布局、企业的重新构建和自我的焕然新生。
AI-CPS OS的真正价值并不来自构成技术或功能,而是要以一种传递独特竞争优势的方式将自动化+信息化、智造+产品+服务和数据+分析一体化,这种整合方式能够释放新的业务和运营模式。如果不能实现跨功能的更大规模融合,没有颠覆现状的意愿,这些将不可能实现。
领导者无法依靠某种单一战略方法来应对多维度的数字化变革。面对新一代技术+商业操作系统AI-CPS OS颠覆性的数字化+智能化力量,领导者必须在行业、企业与个人这三个层面都保持领先地位:
重新行业布局:你的世界观要怎样改变才算足够?你必须对行业典范进行怎样的反思?
重新构建企业:你的企业需要做出什么样的变化?你准备如何重新定义你的公司?
重新打造自己:你需要成为怎样的人?要重塑自己并在数字化+智能化时代保有领先地位,你必须如何去做?
AI-CPS OS是数字化智能化创新平台,设计思路是将大数据、物联网、区块链和人工智能等无缝整合在云端,可以帮助企业将创新成果融入自身业务体系,实现各个前沿技术在云端的优势协同。AI-CPS OS形成的数字化+智能化力量与行业、企业及个人三个层面的交叉,形成了领导力模式,使数字化融入到领导者所在企业与领导方式的核心位置:
精细:这种力量能够使人在更加真实、细致的层面观察与感知现实世界和数字化世界正在发生的一切,进而理解和更加精细地进行产品个性化控制、微观业务场景事件和结果控制。
智能:模型随着时间(数据)的变化而变化,整个系统就具备了智能(自学习)的能力。
高效:企业需要建立实时或者准实时的数据采集传输、模型预测和响应决策能力,这样智能就从批量性、阶段性的行为变成一个可以实时触达的行为。
不确定性:数字化变更颠覆和改变了领导者曾经仰仗的思维方式、结构和实践经验,其结果就是形成了复合不确定性这种颠覆性力量。主要的不确定性蕴含于三个领域:技术、文化、制度。
边界模糊:数字世界与现实世界的不断融合成CPS不仅让人们所知行业的核心产品、经济学定理和可能性都产生了变化,还模糊了不同行业间的界限。这种效应正在向生态系统、企业、客户、产品快速蔓延。
AI-CPS OS形成的数字化+智能化力量通过三个方式激发经济增长:
创造虚拟劳动力,承担需要适应性和敏捷性的复杂任务,即“智能自动化”,以区别于传统的自动化解决方案;
对现有劳动力和实物资产进行有利的补充和提升,提高资本效率;
人工智能的普及,将推动多行业的相关创新,开辟崭新的经济增长空间。
给决策制定者和商业领袖的建议:
超越自动化,开启新创新模式:利用具有自主学习和自我控制能力的动态机器智能,为企业创造新商机;
迎接新一代信息技术,迎接人工智能:无缝整合人类智慧与机器智能,重新
评估未来的知识和技能类型;
制定道德规范:切实为人工智能生态系统制定道德准则,并在智能机器的开
发过程中确定更加明晰的标准和最佳实践;
重视再分配效应:对人工智能可能带来的冲击做好准备,制定战略帮助面临
较高失业风险的人群;
开发数字化+智能化企业所需新能力:员工团队需要积极掌握判断、沟通及想象力和创造力等人类所特有的重要能力。对于中国企业来说,创造兼具包容性和多样性的文化也非常重要。
子曰:“君子和而不同,小人同而不和。” 《论语·子路》云计算、大数据、物联网、区块链和 人工智能,像君子一般融合,一起体现科技就是生产力。
如果说上一次哥伦布地理大发现,拓展的是人类的物理空间。那么这一次地理大发现,拓展的就是人们的数字空间。在数学空间,建立新的商业文明,从而发现新的创富模式,为人类社会带来新的财富空间。云计算,大数据、物联网和区块链,是进入这个数字空间的船,而人工智能就是那船上的帆,哥伦布之帆!
新一代技术+商业的人工智能赛博物理操作系统AI-CPS OS作为新一轮产业变革的核心驱动力,将进一步释放历次科技革命和产业变革积蓄的巨大能量,并创造新的强大引擎。重构生产、分配、交换、消费等经济活动各环节,形成从宏观到微观各领域的智能化新需求,催生新技术、新产品、新产业、新业态、新模式。引发经济结构重大变革,深刻改变人类生产生活方式和思维模式,实现社会生产力的整体跃升。
产业智能官 AI-CPS
用“人工智能赛博物理操作系统”(新一代技术+商业操作系统“AI-CPS OS”:云计算+大数据+物联网+区块链+人工智能),在场景中构建状态感知-实时分析-自主决策-精准执行-学习提升的认知计算和机器智能;实现产业转型升级、DT驱动业务、价值创新创造的产业互联生态链。


长按上方二维码关注微信公众号: AI-CPS,更多信息回复:
新技术:“云计算”、“大数据”、“物联网”、“区块链”、“人工智能”;新产业:“智能制造”、“智能金融”、“智能零售”、“智能驾驶”、“智能城市”;新模式:“财富空间”、“工业互联网”、“数据科学家”、“赛博物理系统CPS”、“供应链金融”。
本文系“产业智能官”(公众号ID:AI-CPS)收集整理,转载请注明出处!
版权声明:由产业智能官(公众号ID:AI-CPS)推荐的文章,除非确实无法确认,我们都会注明作者和来源。部分文章推送时未能与原作者取得联系。若涉及版权问题,烦请原作者联系我们,与您共同协商解决。联系、投稿邮箱:erp_vip@hotmail.com














 867
867











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









