




目录
人体姿态估计(Human Pose Estimation)是计算机视觉领域中的一个重要研究方向,也是计算机理解人类动作、行为必不可少的一步,人体姿态估计是指通过计算机算法在图像或视频中定位人体关键点,目前被广泛应用于动作检测、虚拟现实、人机交互、视频监控等诸多领域。本次课程涵盖人体姿态估计的介绍与应用、2D 姿态估计、3D 姿态估计、DensePose、Body Mesh 以及 MMPose 等内容。
1,人体姿态估计的介绍与应用
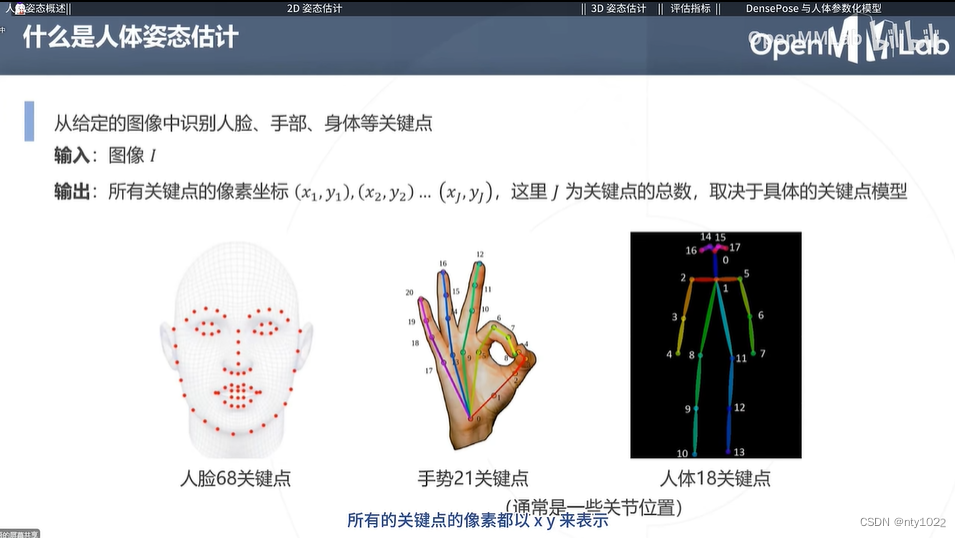
从给定的图像中识别人脸、手部、身体等的关键点;
预测人体关键点,并在图像或视频的恢复3D运行状态;
2、2D姿态估计
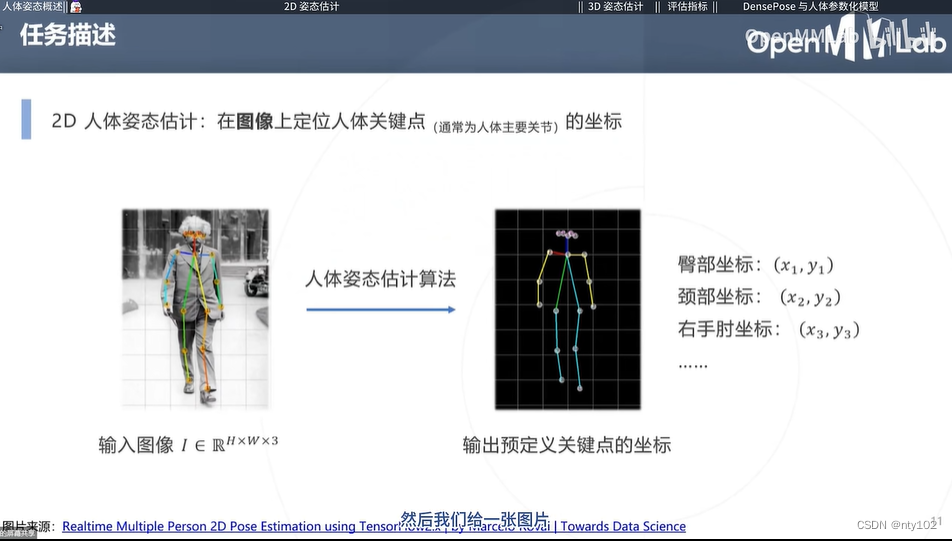
2D人体姿态估计:在图像上定位人体关键点(通常为人力主要关节)的坐标;
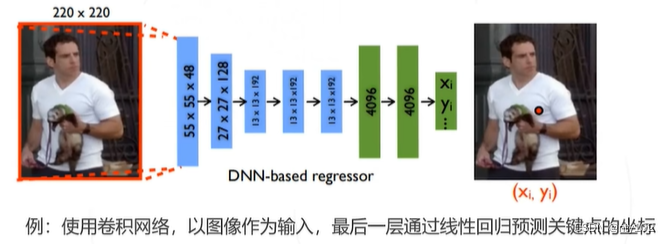
关键点检测问题建模成回归问题,让模型直接回归关键坐标,
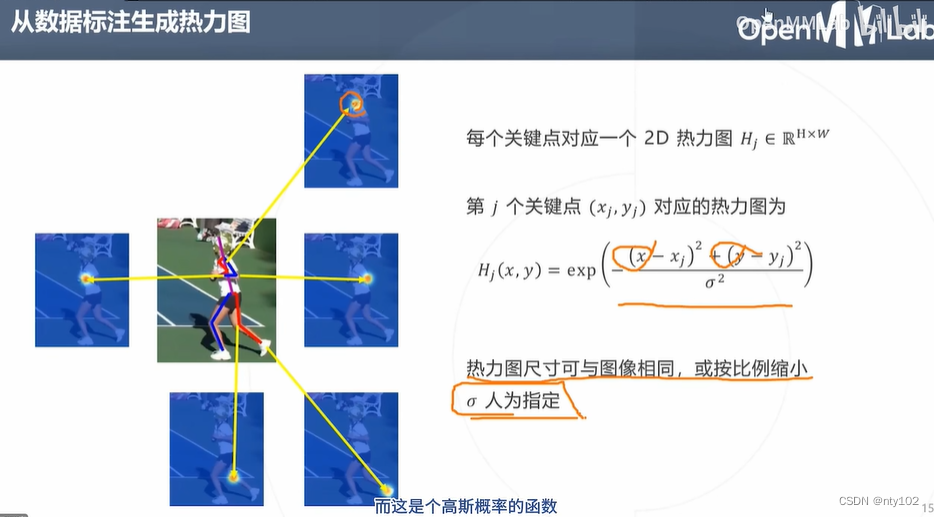
基于热力图:
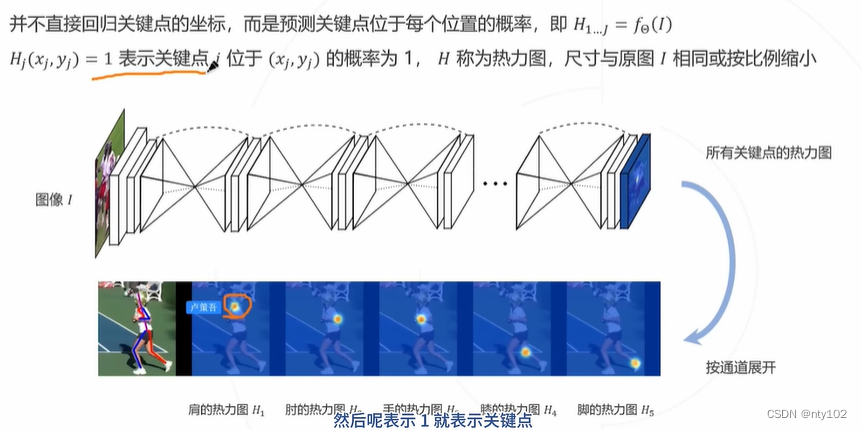
不直接回归关键的坐标,而是预测关键位于每个文职的概率;
热力图可以基于原始关键点坐标生成,作为训练网络的监督信息;
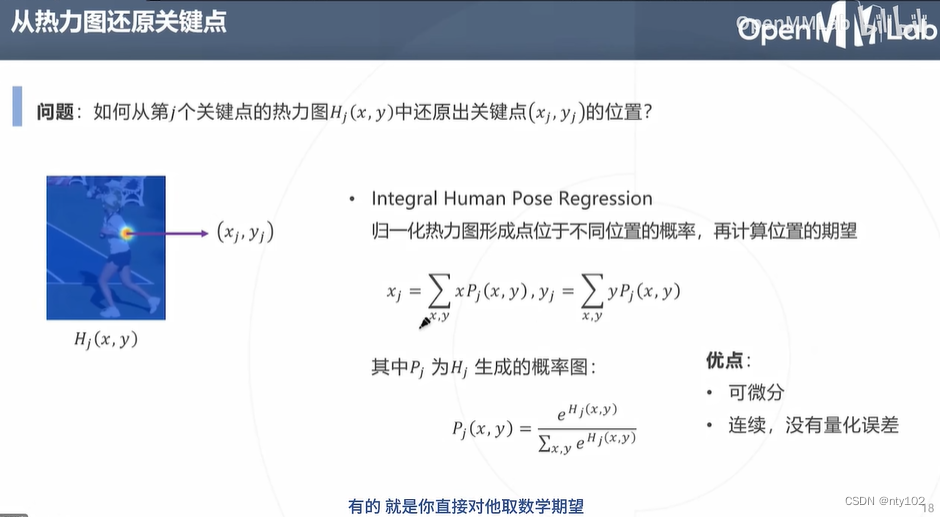
网络预测的热力图也可以通过求极大值等方法得到关键点的坐标;
模型预测热力图比直接回归坐标相对容易模型精度相对更高,因此主流算法更多基于热力图但预测热力图的计算消耗大于直接回归;
2.1 自顶向下的方法
step1,使用目标检测算法检测出每个人体
step2,基于单人图像估计每个人的姿态
优缺点:整体精度受限于检测算法的精度;速度和计算量与人体个数正相关;
一些新工作(SPM)考虑将两个阶段聚合成一个阶段
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









