






利用backstepping算法设计的移动机器人轨迹跟踪控制器matlab源代码,包里面有四种轨迹,分别是直线、圆、椭圆和不规则轨迹,供需要的朋友学习参考
ID:62200675993334894
仿真店铺
移动机器人是一种能够自主移动、执行任务的机器人。在许多应用领域,如工业生产、仓储物流、医疗卫生等,移动机器人已经发挥着重要作用。而移动机器人的轨迹跟踪控制是其中至关重要的一项技术。
在移动机器人轨迹跟踪控制器的设计中,backstepping算法是一种常用的方法。该算法通过构建多个子系统,逐步引入控制输入,并通过迭代的方式实现对机器人轨迹的控制。在本文中,我们将介绍利用backstepping算法设计的移动机器人轨迹跟踪控制器的Matlab源代码,并提供了四种不同的轨迹供读者学习参考。
首先,我们需要了解backstepping算法的原理。该算法基于非线性系统的建模和控制理论,通过将系统分解为多个子系统,并逐步引入控制输入,实现对整个系统的控制。在移动机器人轨迹跟踪控制中,我们希望机器人能够按照给定的轨迹运动,因此可以将机器人的位置误差和速度误差作为系统的状态变量,通过backstepping算法实现对机器人位置和速度的控制。
在本文提供的Matlab源代码中,我们实现了四种不同的轨迹:直线、圆、椭圆和不规则轨迹。读者可以通过运行源代码,观察移动机器人在不同轨迹下的运动情况,并学习backstepping算法在轨迹跟踪控制中的应用。
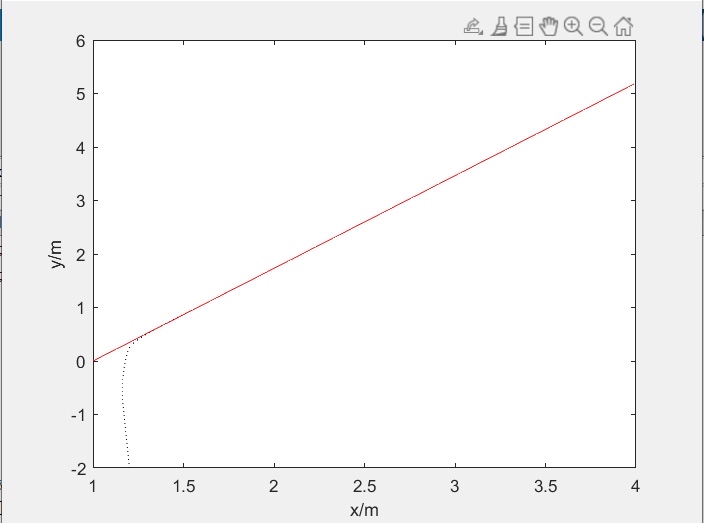
对于直线轨迹,我们首先需要定义目标直线的方程,并将机器人的位置误差和速度误差作为系统的状态变量。然后,通过backstepping算法的迭代过程,逐步引入控制输入,最终实现机器人沿着直线轨迹运动的控制。
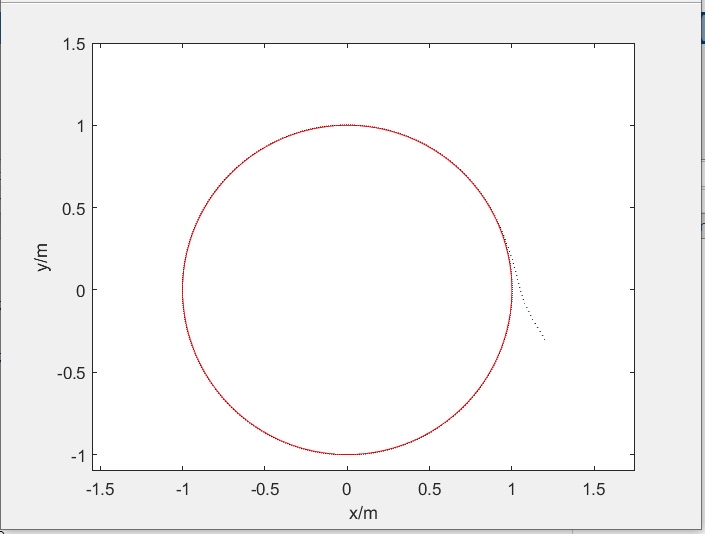
对于圆轨迹,我们可以通过定义圆的半径和圆心坐标,并将机器人的位置误差和速度误差作为系统的状态变量。然后,通过backstepping算法的迭代过程,逐步引入控制输入,最终实现机器人沿着圆轨迹运动的控制。
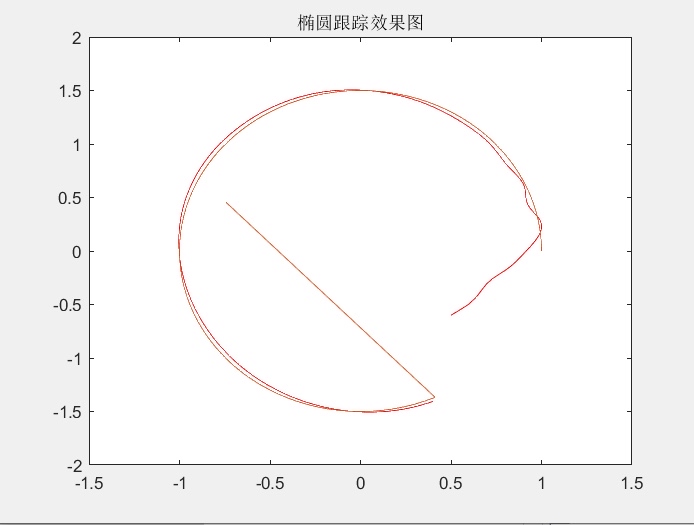
对于椭圆轨迹,我们可以通过定义椭圆的半长轴和半短轴,并将机器人的位置误差和速度误差作为系统的状态变量。然后,通过backstepping算法的迭代过程,逐步引入控制输入,最终实现机器人沿着椭圆轨迹运动的控制。
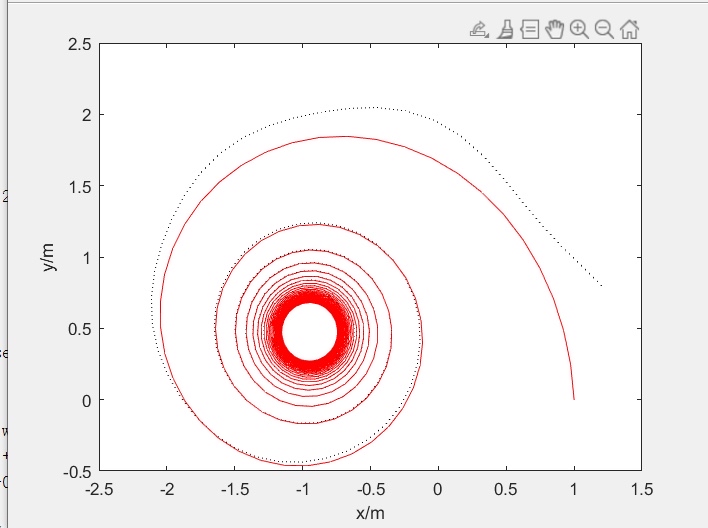
对于不规则轨迹,我们可以通过给定一系列的路径点,将机器人的位置误差和速度误差作为系统的状态变量。然后,通过backstepping算法的迭代过程,逐步引入控制输入,最终实现机器人沿着不规则轨迹运动的控制。
通过实验和仿真,我们可以验证利用backstepping算法设计的移动机器人轨迹跟踪控制器的有效性。本文提供的Matlab源代码为读者提供了一种实现该控制器的具体方法,并提供了不同轨迹的示例,帮助读者理解和应用该技术。
总之,利用backstepping算法设计的移动机器人轨迹跟踪控制器具有重要意义。通过本文提供的Matlab源代码,读者可以学习和掌握该技术,并在实际应用中实现机器人的精确轨迹跟踪。希望本文对读者有所启发,并为移动机器人轨迹跟踪控制领域的研究和应用提供一定的参考价值。
相关的代码,程序地址如下:http://matup.cn/675993334894.html
















 457
457











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









