






利用backstepping算法设计的移动机器人轨迹跟踪控制器matlab源代码,包里面有四种轨迹,分别是直线、圆、椭圆和不规则轨迹,供需要的朋友学习参考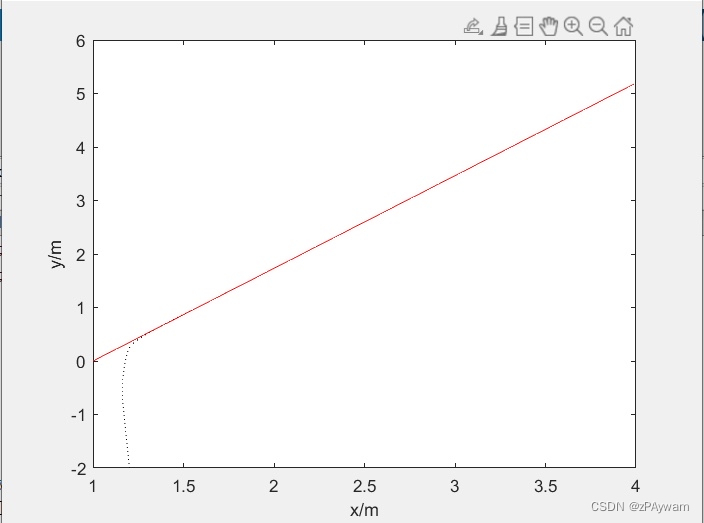
利用backstepping算法设计的移动机器人轨迹跟踪控制器matlab源代码是一个非常实用的技术工具,可应用于移动机器人的轨迹跟踪控制。本文将深入探讨backstepping算法的基本原理,介绍移动机器人轨迹跟踪控制器的设计流程,并为读者提供四种不同轨迹的源代码供参考。
在移动机器人控制系统中,轨迹跟踪是非常重要的一个环节。在许多应用场景中,机器人需要自主地完成特定路径的运动,如工业自动化、农业生产等。针对这一需求,backstepping算法被广泛应用于移动机器人的轨迹跟踪控制系统中。
backstepping算法是一种非线性控制算法,其基本原理是通过迭代反馈控制来实现系统的稳定性和轨迹跟踪精度。在具体实现时,需要根据机器人的运动模型和轨迹要求,设计不同级次的控制器,通过级次升高的方式,逐渐实现系统的稳定控制和轨迹跟踪控制。
针对backstepping算法的应用,本文详细介绍了移动机器人轨迹跟踪控制器的设计流程,包括系统建模、控制器设计和仿真验证等步骤。其中,系统建模是控制器设计的基础,需要准确地描述机器人运动模型和轨迹要求,从而为控制器设计提供可靠的数据支持。
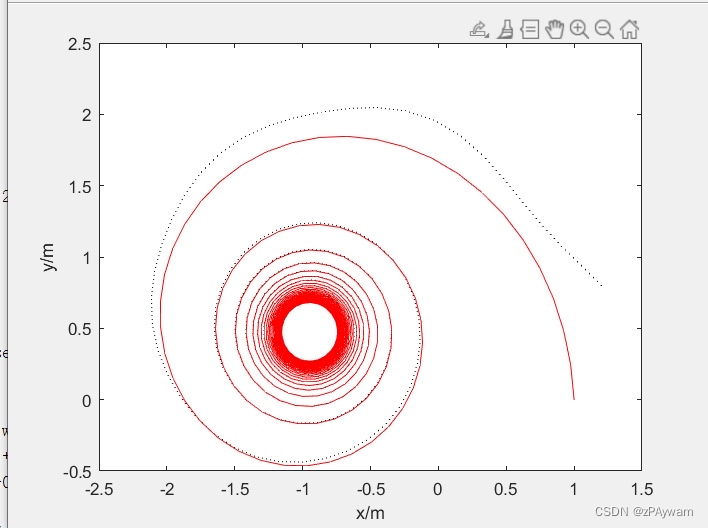
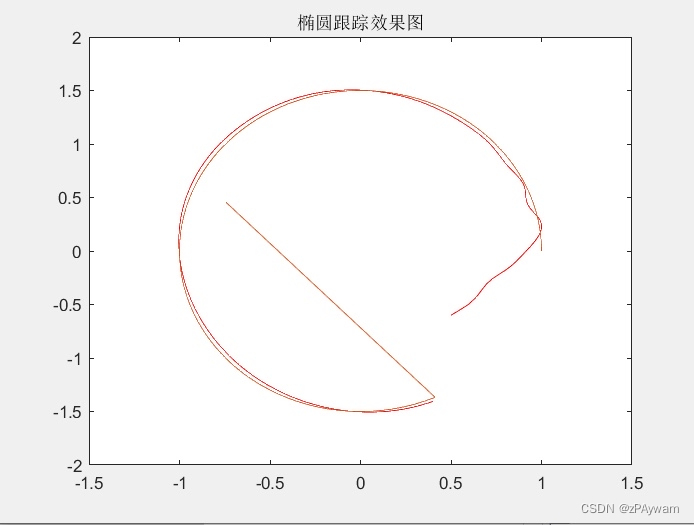
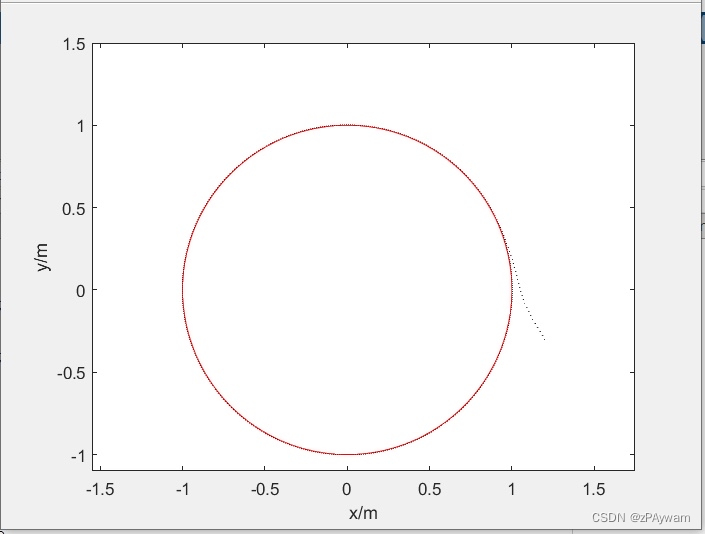
针对移动机器人轨迹跟踪控制器的实现,本文提供了matlab源代码,包含了四种不同轨迹的控制器设计,分别是直线、圆、椭圆和不规则轨迹。这些源代码可以为读者提供实际的操作指导和参考,在具体应用中能够更好地帮助用户实现对移动机器人的轨迹跟踪控制。
总的来说,利用backstepping算法设计的移动机器人轨迹跟踪控制器matlab源代码是一个非常实用的技术工具,具有非常广泛的应用前景。本文以清晰的语言和丰富的内容,提供了详细的控制器设计流程和四种不同轨迹的matlab源代码,为读者提供了实际操作指导和技术参考。我们希望通过本文,能够帮助读者更深入地理解backstepping算法的基本原理和设计方法,提高移动机器人轨迹跟踪控制的精度和稳定性。
相关代码,程序地址:http://lanzouw.top/675993334894.html















 3066
3066











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









