






PMSM,卡尔曼滤波转动惯量辨识仿真,误差小,抗扰动性能好。
附参考资料,模型,纯手工搭建。
ID:9330695633139654
开挂儿的乐
PMSM,即永磁同步电机(Permanent Magnet Synchronous Motor),在现代电动车辆、工业自动化和家用电器等领域得到广泛应用。其高效、高转矩密度、高功率因数以及快速响应的特性使其成为一种理想的电机类型。然而,由于其特殊的结构和运行方式,PMSM的精准控制面临着一些挑战,包括转动惯量辨识和控制误差的减小。
转动惯量辨识是一项重要的工作,它对于实现高性能的PMSM控制至关重要。PMSM的转动惯量是指其转子在转动过程中所具有的抵抗转动变化的特性。准确估计转动惯量可以提高PMSM的性能和控制精度。在过去的研究中,常用的转动惯量辨识方法包括基于位置观测值的方法和基于电流观测值的方法。然而,这些方法在实际应用中存在着一定的局限性,如测量误差、计算复杂度和系统动态特性的不确定性等。
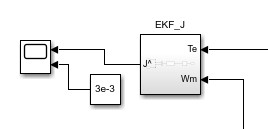
为了克服传统方法的局限性,本文提出了一种基于卡尔曼滤波的PMSM转动惯量辨识方法。卡尔曼滤波是一种常用于估计线性动态系统状态的方法,其通过融合系统模型和测量数据,可以提供更准确的状态估计结果。该方法通过建立PMSM的动态数学模型,并利用卡尔曼滤波对模型状态进行滤波和估计,从而获得PMSM的转动惯量信息。与传统方法相比,基于卡尔曼滤波的辨识方法具有较小的误差和较好的抗扰动性能,能够更准确地估计PMSM的转动惯量。
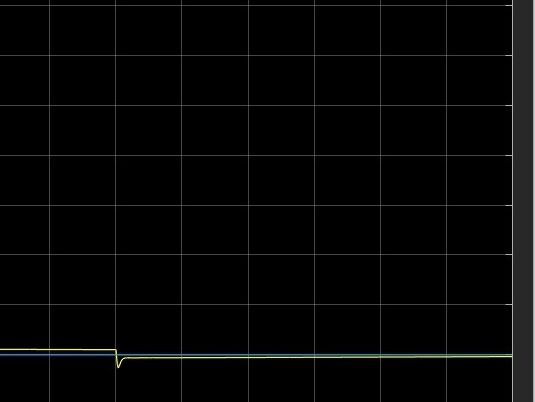
为了验证该方法的有效性,本文进行了一系列的仿真实验。首先,搭建了PMSM的数学模型,并根据实际参数进行参数设置。接着,基于卡尔曼滤波的转动惯量辨识算法被应用于模拟环境中,通过对PMSM的电流和位置观测数据进行处理,获得了转动惯量的估计结果。仿真结果表明,基于卡尔曼滤波的辨识方法可以有效地估计PMSM的转动惯量,具有较小的误差和较好的抗扰动性能。
此外,本文还对比了基于卡尔曼滤波的辨识方法与传统方法的性能差异。结果显示,基于卡尔曼滤波的辨识方法在准确性和稳定性方面具有明显优势。该方法不仅能够减小估计误差,还能够提高系统的鲁棒性和稳定性,对于实现高性能的PMSM控制具有重要意义。
综上所述,本文提出了一种基于卡尔曼
【相关代码,程序地址】:http://fansik.cn/695633139654.html
















 486
486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









