







 本文详细介绍了永磁同步电机无感控制的主要方法,包括基于电机基本磁链关系的估算、模型参考自适应方法、观测器估算、高频注入以及人工智能理论的应用。特别讨论了基于扩展反电势的滑模观测器设计,包括位置估计原理、滑模观测器设计过程、滑模面选取和控制律设计,并通过仿真模型验证了其准确性。同时,展示了传统SMO算法在PMSM无感控制系统中的应用和仿真结果。
本文详细介绍了永磁同步电机无感控制的主要方法,包括基于电机基本磁链关系的估算、模型参考自适应方法、观测器估算、高频注入以及人工智能理论的应用。特别讨论了基于扩展反电势的滑模观测器设计,包括位置估计原理、滑模观测器设计过程、滑模面选取和控制律设计,并通过仿真模型验证了其准确性。同时,展示了传统SMO算法在PMSM无感控制系统中的应用和仿真结果。
永磁同步电机无感控制学习
一、永磁同步电机无感控制主要方法概述
(一)基于永磁同步电机基本磁链关系的转速和位置估算方法
1.直接计算方法
可直接检测的量是定了三相电压和电流,利用它们计算出转了位置角和转子速度是最简单、最直接的方法。特点:计算简单,动态响应快;但是它对电机参数的准确性要求比较高。随着电机运行状况的变化如温度的升高,电机参数会变化,导致转速和位置的估算偏离真实值,而且这种方法没有补偿和校正环节。
2.基于反电动势或定了磁链的估算方法
利用反电动势来估算转子位置和速度是较早提出的方法,这种方法仅依赖于电机的基波方程,因此实施起来比较简单。但是这种方法最大的问题在于转速较低时,反电势的值很小,所以这种方法在低速时误差很大。我们还可以通过计算定了磁链来估计转速和转了位置,磁链由反电动势积分求得,但是由于积分器存在零漂问题,这样得到的磁链值会有积分误差,且当电机转速较低时,问题更加严重。为了克服这个问题,需要引入误差补偿环节,使得估算磁通和实际值相等。
(二)模型参考自适应方法
模型参考位置估计法是基于假定转了位置的位置估计法,首先假设转了在某一位置,利用电机模型计算出在该假定位置时电机的电压或电流值,并通过与实测的电压或电流相比较得出两者的差值,该差值正比于假定位置与实际位置之问的角度差。如果该差值减少为零,则可认为此时假设位置为真实位置。这种方法估计没有完全摆脱对电机参数的依赖性,且参数调节比较麻烦,计算强度大,需要具有高速运算能力的数字信号处理器。
(三)基于各种观测器的估算方法
观测器的实质是状态重构,其原理是重新构造一个系统,利用原系统中可直接测量的变量如输出量和输入量作为它的输入信号,并使其输出信号在一定的条件下等价于原系统的状态。这有稳定性好、鲁棒性强、适应面广的特点。但是由于算法比较复杂、计算量较大,受到计算机或微处理器计算速度的限制。常用的观测器有全阶状态观测器、卡尔曼滤波器、滑模变结构观测器等。
滑模观测器(Sliding Mode Observer,SMO)方法是源于滑模变结构控制的一种方法。滑模变结构控制作为一种非线性控制,与常规控制方法的根本区别在于控制的不连续性。它利用一种特殊的滑模控制方式,强迫系统的状态变量沿着人为规定的相轨迹滑到期望点。由于给定的相轨迹与控制对象参数和外部干扰变化无关,所以滑模变结构具有响应快,对系统内部参数和外部干扰呈不变性的特点,可以保证系统渐进稳定。尤为可贵的是滑模变结构算法简单,易于工程实现。这为复杂的工业控制问题提供了一种很好的解决途径。
(四)高频注入方法
前面的几种方法都依赖于对电动机基波方程的分析,适用于较高转速的应用,在低速运行时存在不少问题。采用在电动机的出线端注入高频电压(或电流)信号的方法,跟踪电动机内部固有的或人为的不对称性来获取转了位置和速度信息,这种方法称为凸极跟踪法,又称为高频激励信号注入法。由于这种方法依赖外加的高频激励来显示凸极性,估计精度与转速无关,并且对电机参数变化不敏感,所以能在低速甚至零速时对转了位置进行精确估计。
(五)人工智能理论基础上的估算方法
专家系统、模糊控制、白适应控制、人工神经元网络纷纷应用于电机控制方案中。
二、基于电机基波反电势的无感控制
1.位置估计原理
永磁同步电机在静止坐标系αβ下的电压方程:
uαuβ=R+pLdωe(Ld-Lq)-ωe(Ld-Lq)R+pLdiαiβ+EαEβ
扩展反电动势是一个重要的概念,其表达式为:
EαEβ=Ld-Lqωeid-piq+ωeψf-sinθecosθe
扩展反电动势包含转子位置信息,并且αβ轴下扩展反电动势的反正切函数正好就等于位置角theta。总结可得,滑模观测器实现位置估计的基本原理:通过滑模观测器观测得到αβ轴下扩展反电动势,并求其反正切函数,得到位置信息。
2.滑模观测器设计过程
①选择滑模观测器参照的数学模型
对于观测器的设计,一般会选取一个数学模型进行参照。而对于PMSM而言,一般会根据电机的电压模型或者电流模型来设计观测器。由于电机的负载状态会影响扩展反电动势的大小,而电机在高速重载的情况下,定子电流将会有较大的变化。因此,对于估算扩展反电动势的滑模观测器,按照PMSM的电流模型来设计会更合理。
将PMSM的电压状态方程,改写为电流状态方程的形式,将其作为滑模观测器的参照模型。其电流状态方程如下:
ddtiαiβ=Aiαiβ+1Lduαuβ-1LdEαEβ
其中A为系统状态矩阵1Ld-R-ωe(Ld-Lq)ωe(Ld-Lq)-R
②滑模观测器的设计
为了估算扩展反电动势 Eα和Eβ,对滑模观测器的设计如下方程所示:
ddtiαiβ=Aiαiβ+1Lduαuβ-1LdEαEβ
观测器在形式上和实际电机的数学模型完全一致。原因:由于实际电机电流模型中包含扩展反电动势的大小,如果我们设计的滑模观测器模型,能够通过实时校正,逐步的逼近实际的电机模型,当观测器模型与实际电机模型完全一致的时候,观测器模型内的扩展反电动势参数即为所需要的实际电机扩展反电动大小。
③滑模面的选取
将上述两个数学模型进行做差,可以得到如下定子电流误差方程:
ddtiαiβ=Aiαiβ+1LdEα-vαEβ-vβ
如果能够使得实际 α 轴定子电流和 β 轴定子电流一致,那么滑模观测器的扩展反电动势也和实际电机的扩展反电动势一致。因此可将滑模面设计为 :
iα=-iα-iα,iβ=-iβ-iβ
④滑模控制律的设计
滑模变结构控制律原理
当系统参数在滑模面以上时,使其运动轨迹向下;当系统参数在滑模面以下时,其运动轨迹向上,其运动时刻向着滑模面。因此开关函数 sgn() 为滑模观测器的实现提供了坚实基础。当系统参数运行至滑模面以上时,sgn = -1 ,其运动轨迹向下了;当系统参数在滑模面以下时,sgn = 1,其运动轨迹向上了。
对于扩展反电动势的滑模控制律设计而言,就是使得电流回归滑模面,使得观测器电流和实际电流之间的误差为0,则观测器扩展反电动势等于实际电机扩展反电动势,因此可将其滑模控制律设计为:
EαEβ=vαvβeq=k sgn(iα)eqk sgn(iβ)eq
3. 由扩展反电势得到电机位置和速度信息
按照反正切函数的原理,只需要对扩展反电动势进行求解反正切即可。如下所示:
θeq=-arctan(EαEβ)
但是事实上,直接通过滑模观测器输出的扩展反电动势是无法得到准确的实际位置信号的。其原因是:滑模观测器时刻在滑模面上下抖振,输出的扩展反电动势包含不连续的高频切换信号,直接求取结果抖振严重。因此,为了提取连续的扩展反电动势估计值,通常需要外加一个低通滤波器,滤除高频切换信号。
eαeβ=ωcs+ωczaωcs+ωczβ
当高频信号被滤除后,扩展反电动估计值的幅值和相位都会发生变化,这个变化造成的幅值减小和相位延迟都会直接影响转子位置估计的准确性。为了解决低通滤波器造成的幅值减小以及相位延迟,需要根据低通滤波器自身的截止频率进行延迟补偿。补偿原理如下所示:
θe=θeq+arctan(ωeωc)
式中wc为低通滤波器截至频率,we为估计转速。
综上,可以总结滑模观测器的实现原理如下框图所示,先通过滑模观测器得到扩展反电动势,然后对扩展反电动势进行滤波处理提出有用的信号,进而对使用的低通滤波器进行相位补偿,最终通过补偿后准确的扩展反电动势信息得到位置角和速度信息。
传统SMO算法的实现原理框图
三、传统SMO仿真模型搭建及分析
1.SMO模型搭建
传统SMO算法总体仿真模型
SMO算法及低通滤波环节模型
基于反正切函数求取转速及位置(加入补偿)模型
2.SMO模型初步验证
首先利用前面搭建的PMSM矢量控制系统,有传感器(使用测量模块来获得电机的转子位置和转速信息),调节控制器参数,满足要求。在此基础上,根据无传感器控制算法,搭建仿真模型,调节无传感器控制器的参数,将转子位置估计值和转速估计值与实际的转子位置与转速进行比较。
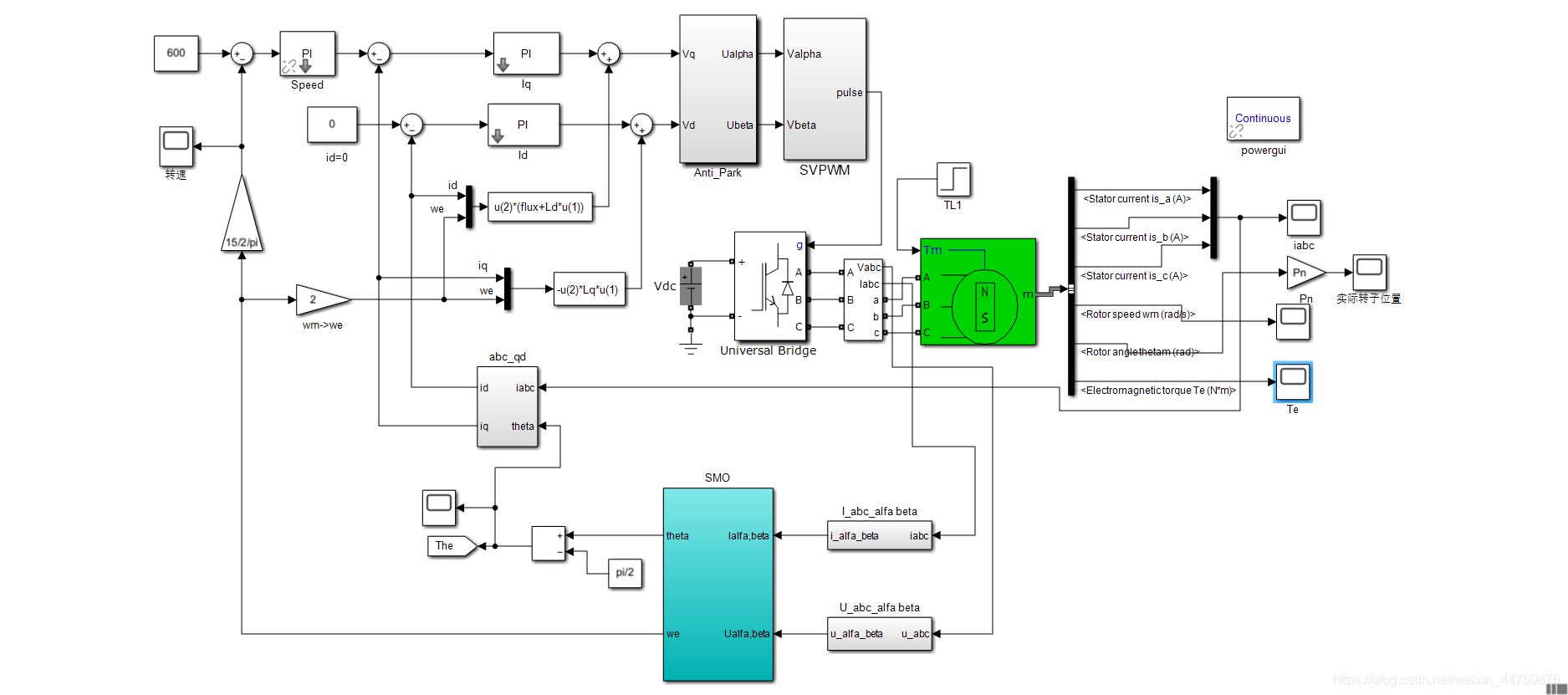
在PMSM有感foc控制模型基础上验证SMO
其中,PMSM参数设置为:极对数p=4,定子电感Ls=8.5mH,定子电阻R=1.2Ω,磁链为0.175Wb,转动惯量J=0.0008kg·m2 ;直流侧电压为311V。
转子位置对比曲线 转子位置误差曲线
转速对比曲线 转速误差曲线
可以从图中看到估计位置与实际位置曲线基本重合,转速对比曲线基本重合,滑模观测器的准确性进一步得到验证。
3.PMSM传统SMO仿真系统搭建及仿真
传统SMO算法下PMSM无感控制系统模型
转速曲线仿真波形
转子位置对比曲线 转子位置误差曲线
电磁转矩仿真波形 三相定子电流
系统仿真模型曲线不佳(电磁转矩、三相电流),待查找问题、调节参数完善。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











