






永磁同步电机基于滑膜的无速度传感器控制仿真
simulink
pmsm+smo
ID:3980705833724099
一直转的小马达
永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)作为一种具有高效、高性能的电机,在各种工业应用中得到了广泛的应用。为了实现对PMSM的精确控制,传统方法通常依赖于速度传感器,但这种传感器不仅成本高昂,而且安装和维护也较为复杂。因此,研究人员提出了基于滑膜的无速度传感器控制(Sliding Mode Observer-based Sensorless Control,简称SMO)方法,该方法能够在不借助额外传感器的情况下实现对PMSM的精确控制。
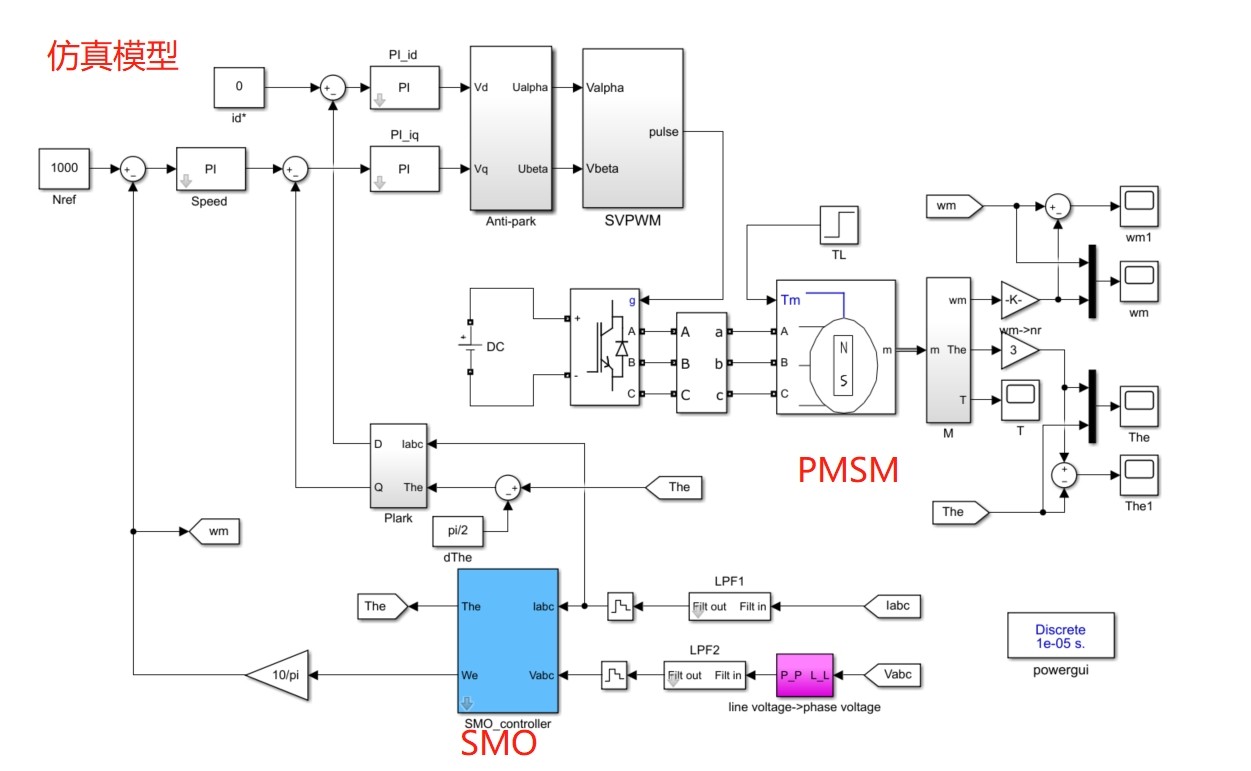
在本文中,我们将使用Simulink软件对基于滑膜的无速度传感器控制方法进行仿真分析。Simulink作为一种强大的仿真工具,可以方便地建立电机模型并进行精确的仿真实验。我们将使用PMSM模块和SMO模块来构建电机控制系统,其中PMSM模块模拟了PMSM的电磁特性,而SMO模块则实现了无速度传感器的控制算法。
在建立电机模型之前,我们需要先对PMSM进行建模和参数设置。PMSM的特点是具有永磁铁和定子绕组,其工作原理基于电磁学原理。我们需要确定磁极数、绕组数据以及永磁铁的磁性参数等关键参数。这些参数的准确设置对于后续的控制精度至关重要。
接下来,我们将使用Simulink中的PMSM模块来建立电机模型。通过设置关键参数和输入信号,我们可以获得PMSM的电流、转速和转矩等输出。为了实现无速度传感器控制,我们还需要添加SMO模块来估计电机的转速信息。SMO模块基于滑膜理论,通过对比实际输出和估计输出,实现对转速信息的估计与修正。
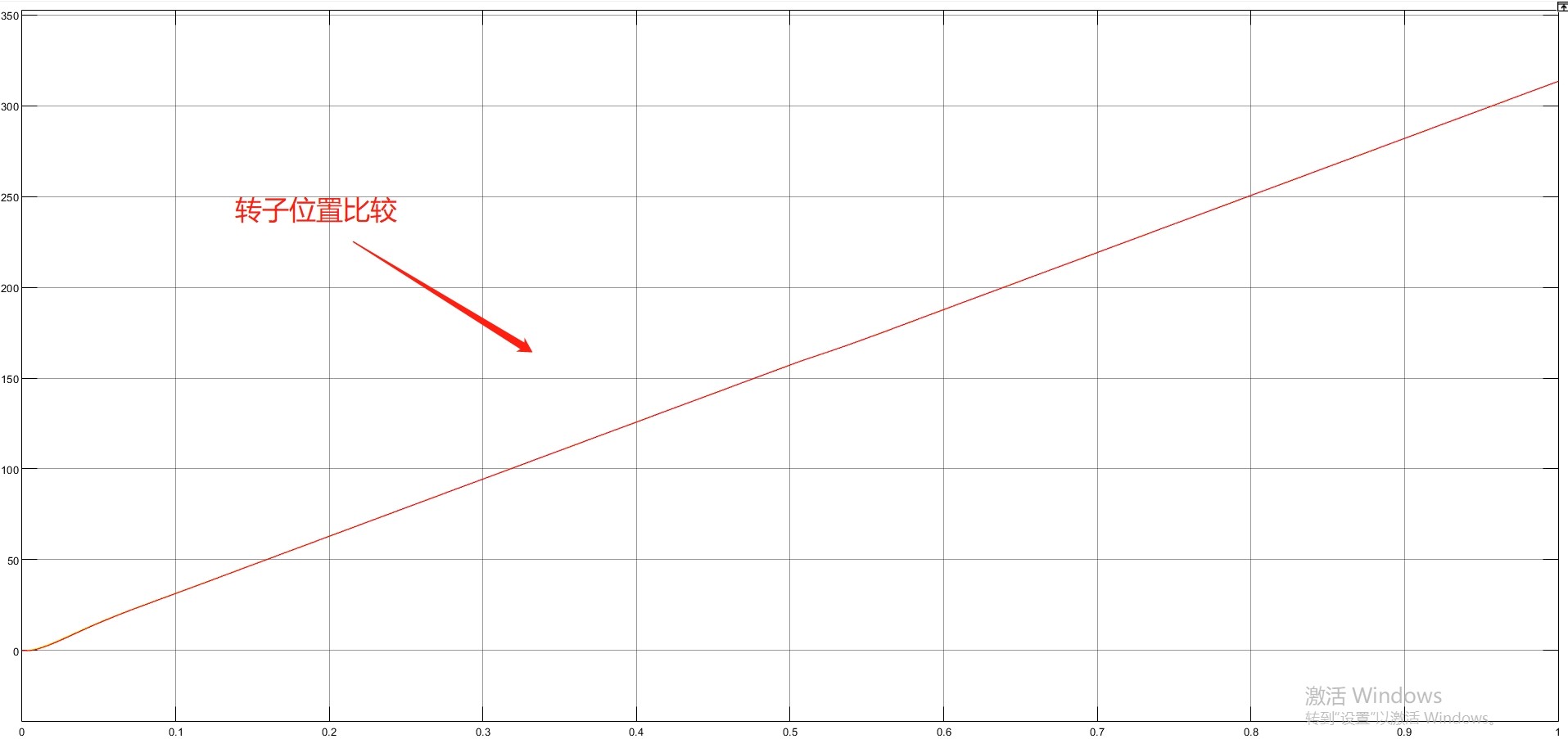
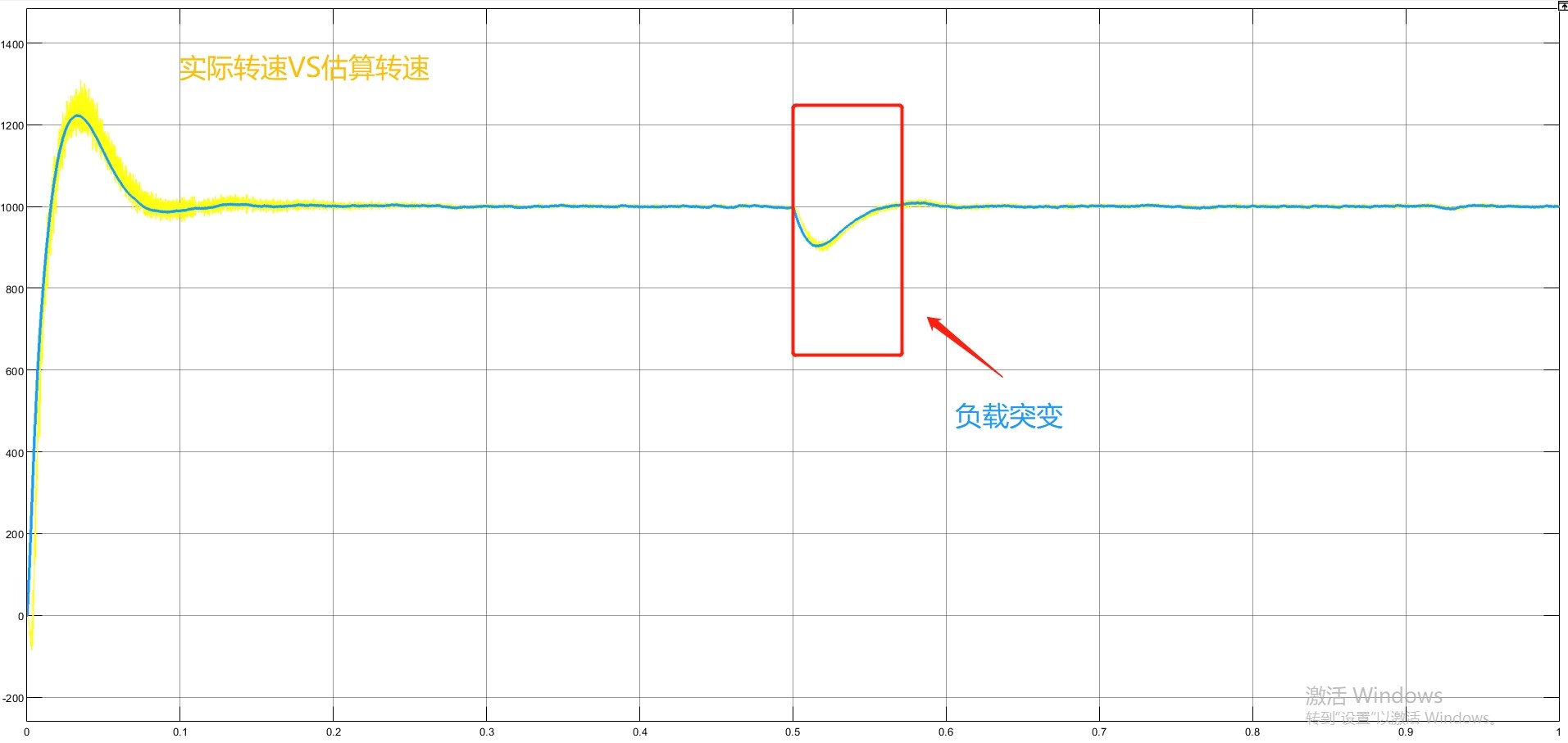
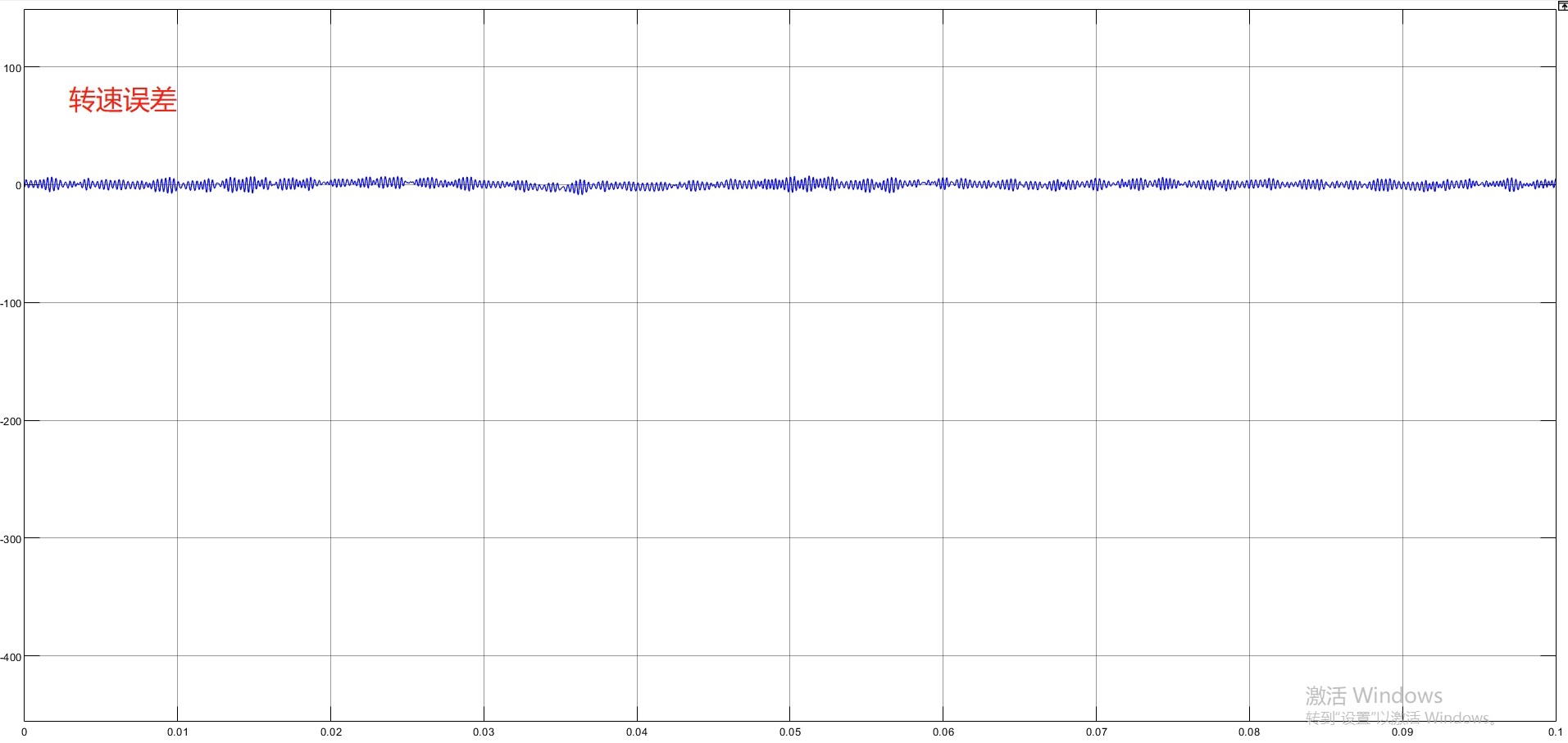
通过仿真实验,我们可以观察到基于滑膜的无速度传感器控制方法的效果。在不同负载、不同转速条件下,我们可以观察到电机的转速控制精度和响应速度。同时,我们还可以比较传统速度传感器控制方法与无速度传感器控制方法在控制精度和成本方面的差异。
除了控制精度的分析,我们还可以对基于滑膜的无速度传感器控制方法进行性能评估。通过分析系统的稳定性、抗干扰能力和鲁棒性,我们可以更全面地评估该方法在实际应用中的可行性和优劣势。
综上所述,基于滑膜的无速度传感器控制方法能够有效地实现对PMSM的精确控制,并且克服了传统速度传感器方法的不足之处。通过Simulink软件的仿真分析,我们可以更好地理解该控制方法的工作原理和性能特点。未来,我们可以进一步探索该方法在实际应用中的可行性,并进行更多的优化和改进,以满足不同工业应用对PMSM精确控制的需求。
【相关代码,程序地址】:http://fansik.cn/705833724099.html
















 241
241











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









