






自动驾驶轨迹跟踪控制-纵向mpc横向lqr
轨迹和路径不同,注意是轨迹跟踪不是路径跟踪
模型可以提供前轮转向/后轮转向/四轮转向三种模型,多套模型打包有优惠。
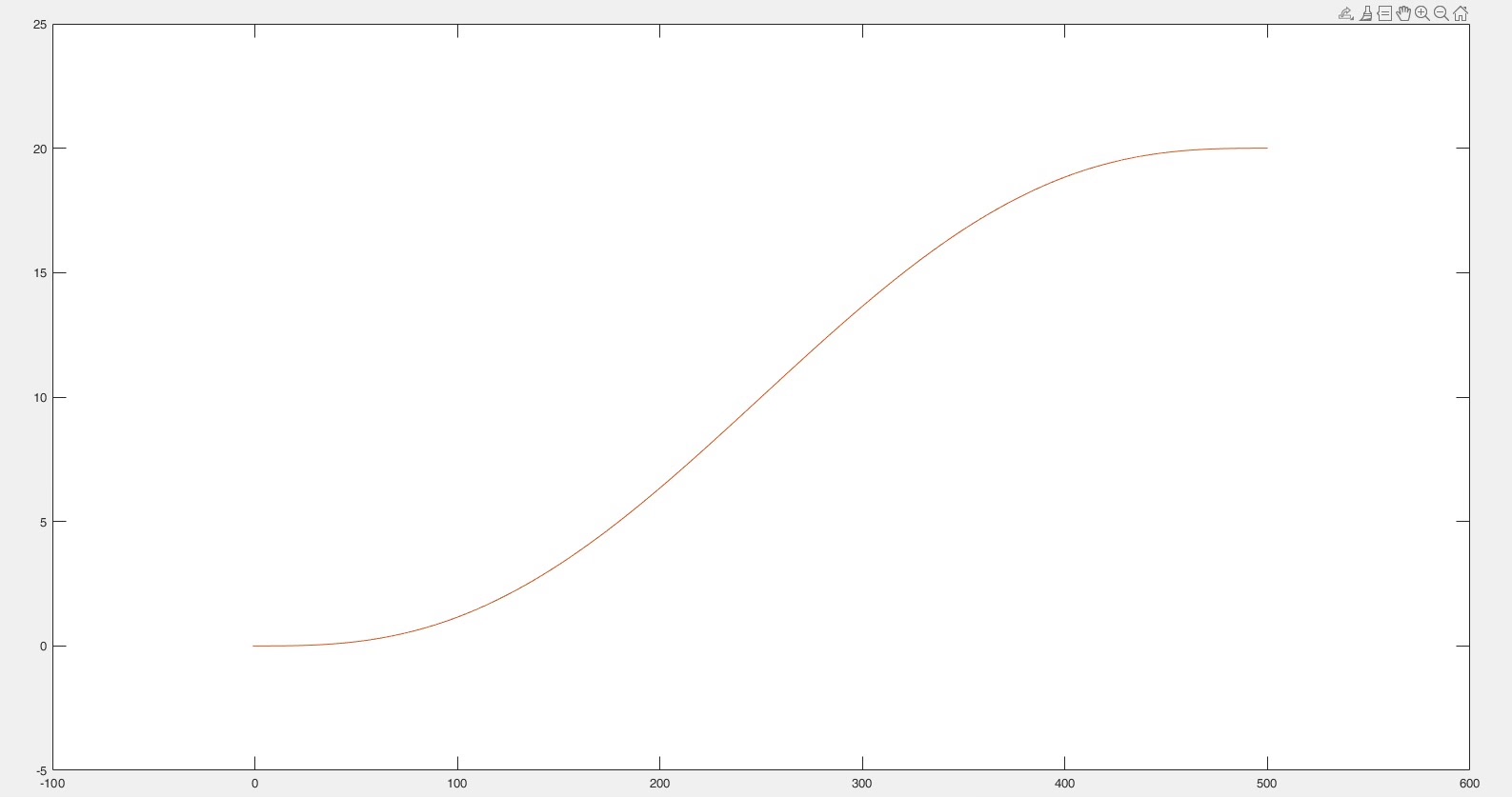
跟踪五次多项式换道轨迹,纵向控制已经制作好油门刹车标定表,无需自己做标定。
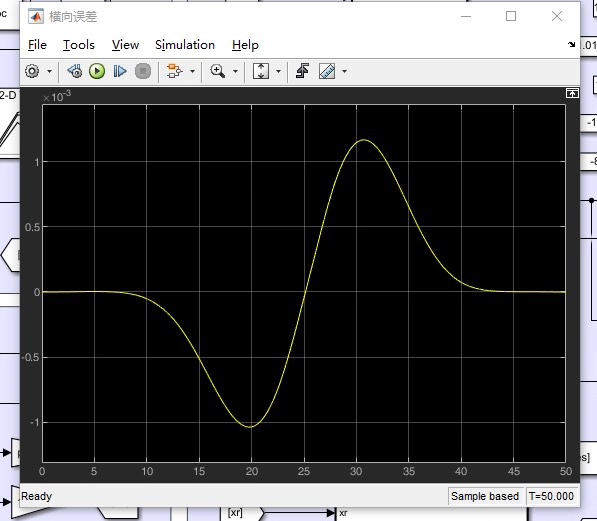
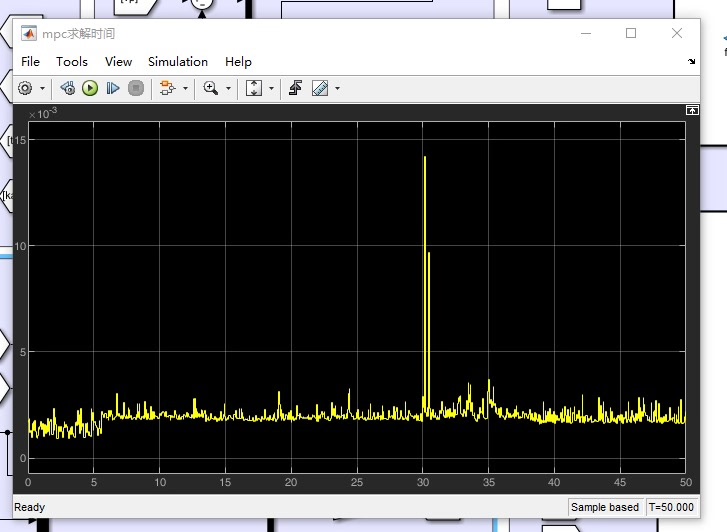
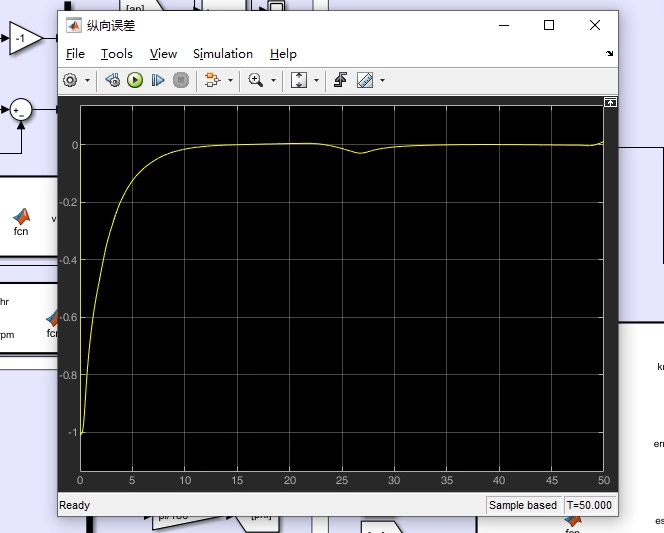
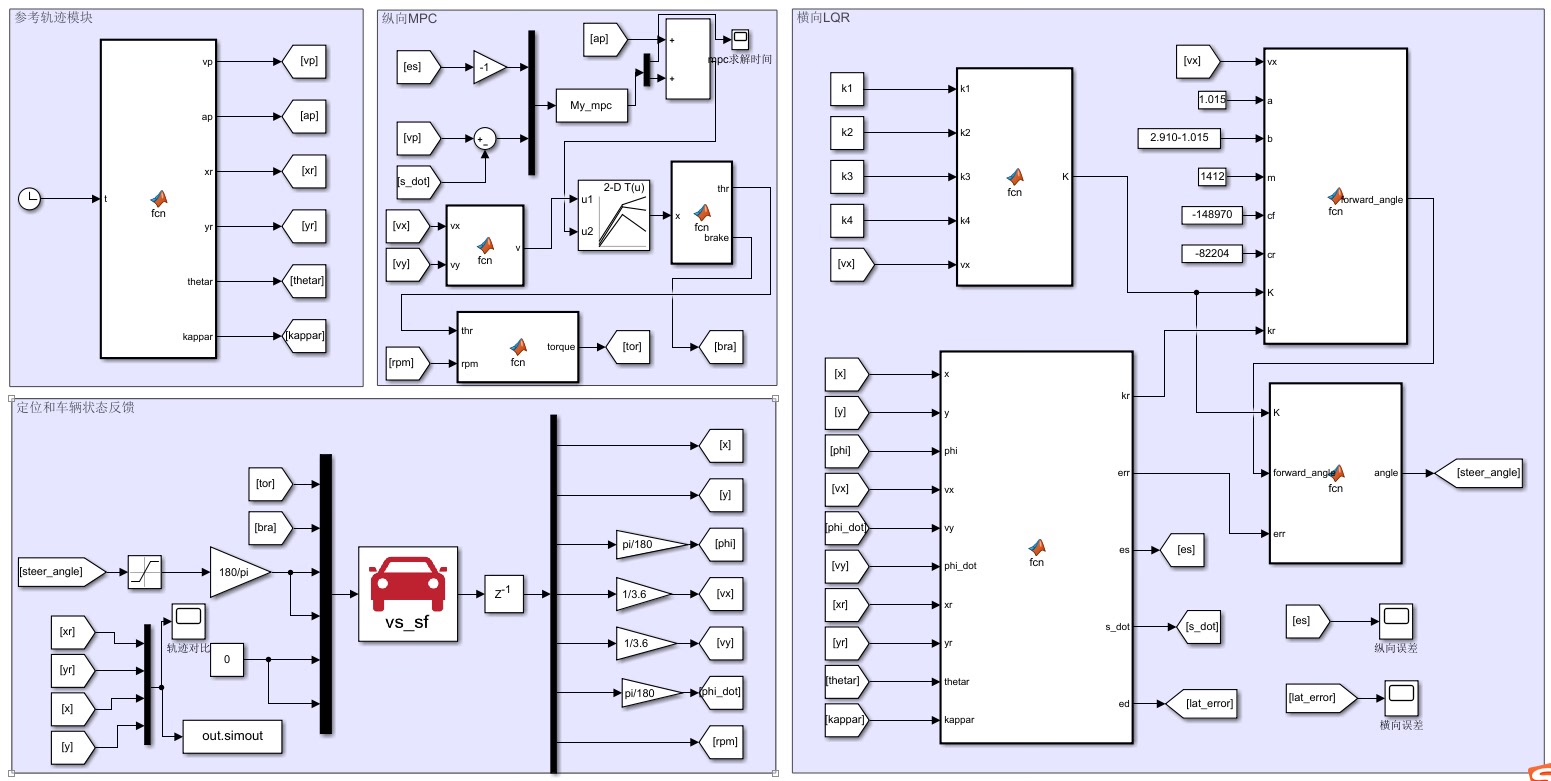
控制效果完美,能查看mpc求解时间,横纵向误差,轨迹跟踪效果,lqr反馈矩阵k可以离线计算也可以在线实时计算。
需要下面其他模型也可以联系,价格优惠多多。
ID:17120706027226680
阿Xin的自动驾驶小店
自动驾驶技术一直以来都备受关注,其中轨迹跟踪控制是实现自动驾驶的重要环节之一。本文将围绕纵向MPC(Model Predictive Control)和横向LQR(Linear Quadratic Regulator)展开讨论,探讨自动驾驶轨迹跟踪控制的技术原理和模拟效果。
首先,我们需要明确轨迹和路径的区别。在自动驾驶领域中,路径通常是指规划出来的一系列坐标点,用于指导车辆行驶的路线,而轨迹则是车辆在实际行驶中所采取的动态轨迹,通常由车辆的控制系统来实现。因此,本文关注的是轨迹跟踪控制,而非路径跟踪。
在自动驾驶轨迹跟踪控制中,我们可以提供多种模型,包括前轮转向、后轮转向和四轮转向等。这些模型可以根据具体需求进行选择和使用。同时,我们还提供了多套模型打包,以期为用户提供更多的选择和优惠。
在跟踪五次多项式换道轨迹方面,我们已经制作好了油门刹车标定表,用户无需自己进行标定。此外,我们也可以提供双移线轨迹,额外收取20的费用。
控制效果方面,我们的系统能够提供详细的信息,包括MPC求解时间、横纵向误差以及轨迹跟踪效果等。此外,LQR反馈矩阵K可以进行离线计算,也可以进行在线实时计算,以满足不同的需求。
需要注意的是,一旦发货后,我们无法接受退货。同时,我们也提供远程指导服务,以帮助用户更好地使用我们的系统。
除了上述提到的模型,我们还提供其他多种模型,并且价格优惠多多。如有需求,请随时联系我们。
总而言之,自动驾驶轨迹跟踪控制是实现自动驾驶的关键技术之一。本文围绕纵向MPC和横向LQR展开讨论,介绍了我们提供的不同模型和控制效果。通过使用我们的系统,用户可以有效地实现自动驾驶车辆的精确轨迹跟踪控制。
【相关代码,程序地址】:http://fansik.cn/706027226680.html
















 2112
2112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









