







运动控制卡因其高性能和灵活性,在多个行业中得到了广泛应用。主要应用行业包括但不限于:
- 电子制造行业:用于精密电子元件的组装、贴片、检测等自动化生产线。
- 半导体设备:在晶圆处理、芯片检测等高精度设备中提供精确的运动控制。
- 数控机床:提升机床的加工精度和效率,适用于金属切削、雕刻等多种加工任务。
- 激光加工设备:包括激光切割、打标、焊接系统,特别是在需要高精度定位和快速响应的场合。
- 印刷包装机械:提高印刷质量和效率,实现精准的物料搬运和定位。
- 机器人行业:为工业机器人、服务机器人等提供运动控制解决方案,提升其运动的平滑性和准确性。
- 纺织机械:在自动化纺织设备中实现精准的织造、绣花等操作。
- 医疗设备:如医疗影像设备、手术机器人等,需要高度精确和稳定控制的场合。
固高科技运动控制卡的主要优点包括:
- 高性能插补算法:固高在插补技术上具有国内领先地位,能够实现高精度、高速度的运动轨迹控制。
- 广泛兼容性:支持多种总线标准(如PCI、PCIe、EtherCAT等),易于集成到不同系统中。
- 丰富的软件支持:提供功能强大的编程和调试软件,便于用户开发定制化应用。。
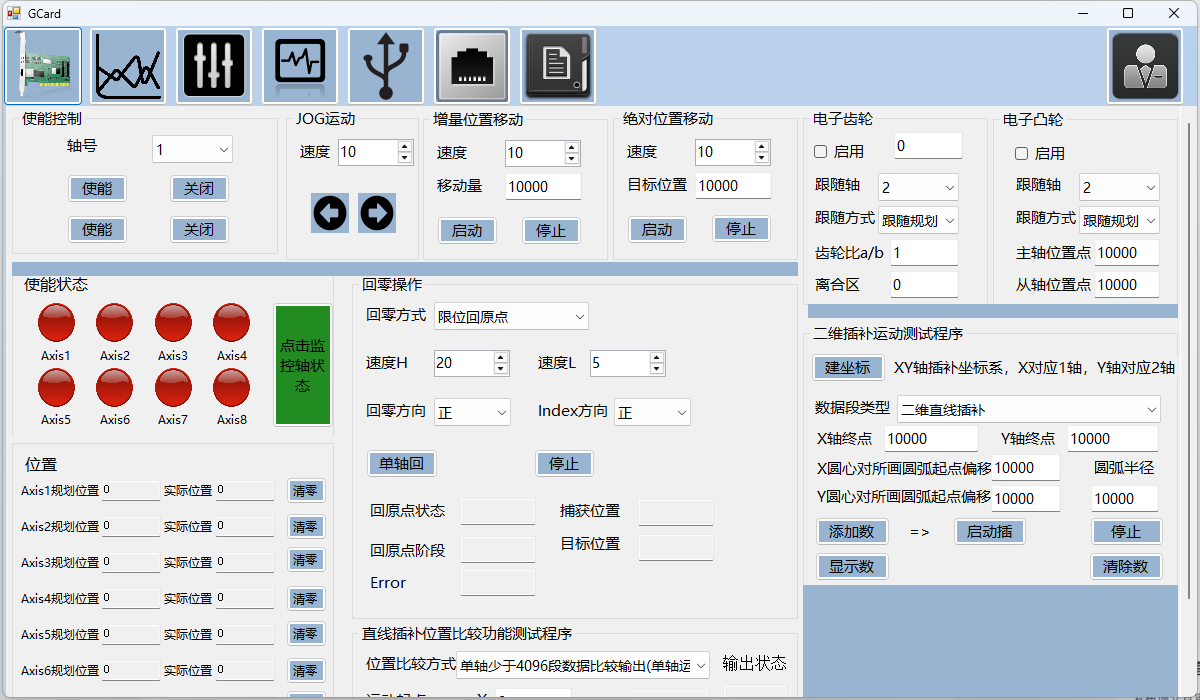
固高科技(Googol Technology)的运动控制卡非常方便与C#集成。根据提供的信息,固高为用户提供了完整的C#语言示例程序和源代码,特别是针对GTS系列如GTS-800运动控制卡。这些示例程序涵盖了点胶机的初始化、运动控制、速度规划、位置校准等核心功能,有助于用户快速进行二次开发。
固高提供的C#示例代码和操作手册等资料齐全,使得开发者能够参照现有代码进行修改和扩展,以满足特定的应用需求。这意味着即便是没有深厚运动控制背景的C#开发者,也能较为容易地利用固高的运动控制卡来开发控制系统。
此外,固高运动控制卡通常会配备相应的SDK(Software Development Kit,软件开发工具包),里面包含了一系列库文件和API接口文档,让C#程序员可以通过调用这些库函数来控制运动卡,进行设备配置、运动指令发送、状态监控等操作,从而实现对电机或机器人的精准控制。
参考程序下载------>点击

private void btn_homeStart_Click(object sender, EventArgs e)
{
short axisHome;
axisHome = (short)(cmb_selectAxis.SelectedIndex + 1);
mc.THomeStatus tHomeStatus = new mc.THomeStatus();
mc.THomePrm tHomePrm = new mc.THomePrm();
cmb_moveDir.Invoke(new Action(() =>
{
switch (Convert.ToInt16(cmb_moveDir.SelectedIndex + 1)) //
{
case 1: tHomePrm.moveDir = 1;
break;
case 2: tHomePrm.moveDir = -1;
break;
}
}));
cmb_indexDir.Invoke(new Action(() =>
{
switch (Convert.ToInt16(cmb_indexDir.SelectedIndex + 1)) //
{
case 1: tHomePrm.indexDir = 1;
break;
case 2: tHomePrm.indexDir = -1;
break;
}
}));
tHomePrm.edge = 0;
tHomePrm.velHigh = (double)nud_velH.Value;
tHomePrm.velLow = (double)nud_velL.Value;
tHomePrm.acc = 1;
tHomePrm.dec = 1;
tHomePrm.smoothTime = 10;
tHomePrm.homeOffset = 0;
tHomePrm.searchHomeDistance = 0;
tHomePrm.searchIndexDistance = 20000;
tHomePrm.escapeStep = 20000;
cmb_home.Invoke(new Action(() =>
{
switch (Convert.ToInt16(cmb_home.SelectedIndex + 1)) //mode
{
case 1: tHomePrm.mode = mc.HOME_MODE_LIMIT;
break;
case 2: tHomePrm.mode = mc.HOME_MODE_LIMIT_HOME;
break;
case 3: tHomePrm.mode = mc.HOME_MODE_LIMIT_INDEX;
break;
case 4: tHomePrm.mode = mc.HOME_MODE_LIMIT_HOME_INDEX;
break;
case 5: tHomePrm.mode = mc.HOME_MODE_HOME;
break;
case 6: tHomePrm.mode = mc.HOME_MODE_HOME_INDEX;
break;
case 7: tHomePrm.mode = mc.HOME_MODE_INDEX;
break;
}
}));
//回零线程
if (threadHome == null)
{
threadHome = new Thread(() =>
{
gCard.SmartHome(0, axisHome, tHomePrm, out tHomeStatus);
}) { IsBackground = true };
threadHome.Start();
}
else
{
threadHome.Abort();
threadHome = new Thread(() =>
{
gCard.SmartHome(0, axisHome, tHomePrm, out tHomeStatus);
}) { IsBackground = true };
threadHome.Start();
}
//状态监测线程
mc.THomeStatus homeStatus = new mc.THomeStatus();
if (threadHomeStatus == null)
{
threadHomeStatus = new Thread(() =>
{
while(true)
{
sRtn = mc.GT_GetHomeStatus(0,axisHome,out homeStatus );
this.Invoke(new Action(() =>
{
txt_homeRun.Text = homeStatus.run.ToString();
txt_homeStage.Text = homeStatus.stage.ToString();
txt_homeError.Text = homeStatus.error.ToString();
txt_capturePos.Text = homeStatus.capturePos.ToString();
txt_targetPos.Text = homeStatus.targetPos.ToString();
}));
}
}){ IsBackground = true };
threadHomeStatus.Start();
}
else
{
threadHomeStatus.Abort();
threadHomeStatus = new Thread(() =>
{
while (true)
{
sRtn = mc.GT_GetHomeStatus(0, axisHome, out homeStatus);
this.BeginInvoke(new Action(() =>
{
//Thread.Sleep(5);
txt_homeRun.Text = homeStatus.run.ToString();
txt_homeStage.Text = homeStatus.stage.ToString();
txt_homeError.Text = homeStatus.error.ToString();
txt_capturePos.Text = homeStatus.capturePos.ToString();
txt_targetPos.Text = homeStatus.targetPos.ToString();
}));
}
}) { IsBackground = true };
threadHomeStatus.Start();
}
}














 4932
4932











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









