







原文链接如下:https://www.cnblogs.com/houkai/p/6661607.html
对极几何是视图几何理论的基础,对极几何(Epipolar Geometry)描述了同一场景两幅图像之间的视觉几何关系。
设两相机的中心分别为Ol和Or,两图像平面分别为I和![]() ,P为共同视域中的场景空间点,它在两幅图像平面上的像点分别为pl和pr。对极几何关系中主要包含以下几何元素:
,P为共同视域中的场景空间点,它在两幅图像平面上的像点分别为pl和pr。对极几何关系中主要包含以下几何元素:
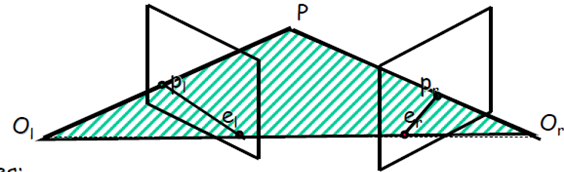
极平面:两个相机坐标原点Ol、Or和物体P组成的平面。
极线:极平面和两个像平面的交线,即和
极点:为右相机原点在左像平面的投影;
为左相机原点在右像平面的投影
我们要研究的极线约束:两极线上点的对应光系(和
当然也满足)
如果有两个相机,cam1在建筑物的左侧,cam2在建筑物的右侧,拍摄得到两张照片.像平面是无限延伸的,照片只是像平面的一部分.

左侧是cam1的像平面,右侧是cam2的像平面。
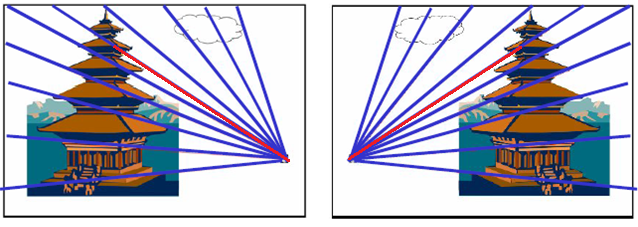
红线表示相应的对极线,这些对极线满足一定的几何约束。
本质矩阵
两个相机坐标系的关系:
是物体P在
相机坐标系的位置,
是物体P在
坐标系的位置。
相对于
的旋转矩阵为R,位移为T。则:
![]()
由于R是正交矩阵,可以写成:![]()
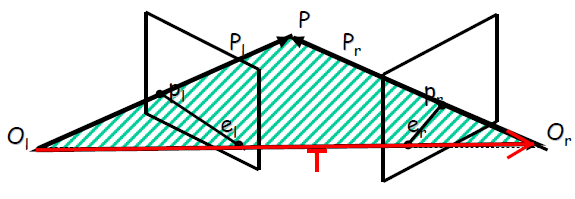
由于三向量共面,如下图,所以它们的混合积为0.
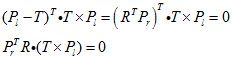
将叉乘写成矩阵相乘的形式:
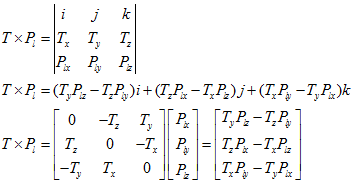
令: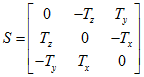 ,S是一个秩为2的矩阵,则:
,S是一个秩为2的矩阵,则:
![]()
显然,和
可以通过矩阵E=RS来约束,我们称E为本质约束(Essential Matrix)。它具有两个性质:
- 秩为2
- 只依赖于外部参数R和T
基础矩阵
继续前面的本质矩阵,结合成像的集合关系:

这里的和
是在单位距离坐标系下的位置.如果我们要分析的是图像,需要转到像素坐标系下,此时:

从而有:

我们称矩阵F为基础矩阵:![]() ,性质是:
,性质是:
- 秩为2
- 依赖于相机内参和外部参数R和T
基础矩阵给出了:在已知一个点和F的情况下,其匹配点的直线约束方程:

直线约束方程为:![]()
进一步分析:![]() 而这里的F是秩为2的矩阵,所以存在:
而这里的F是秩为2的矩阵,所以存在:![]() 和
和![]() 。
。
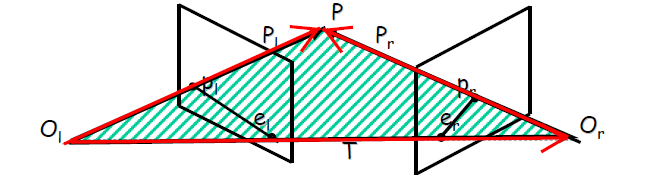
e表示它满足所有的直线约束,也就是上面图中那一堆直线的交点,物理意义便是cam2(cam1)在cam1(cam2)的像平面的投影,即极点。
使用SVD分解即可求得极点。















 1635
1635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









