







目录
一、UR通信端口
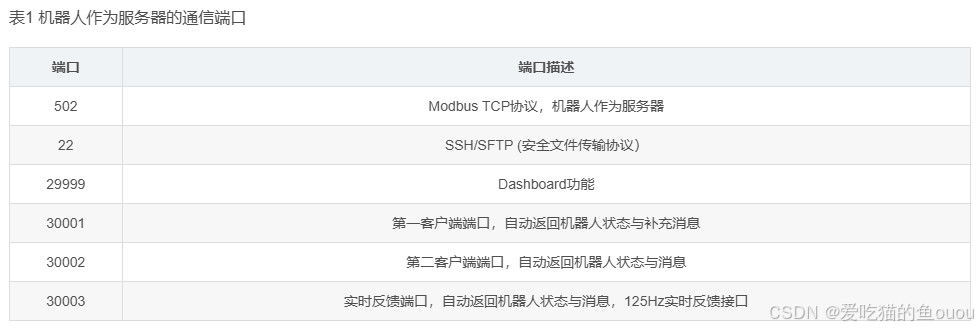

二、电脑(客户端)连接URSim仿真软件(服务端)
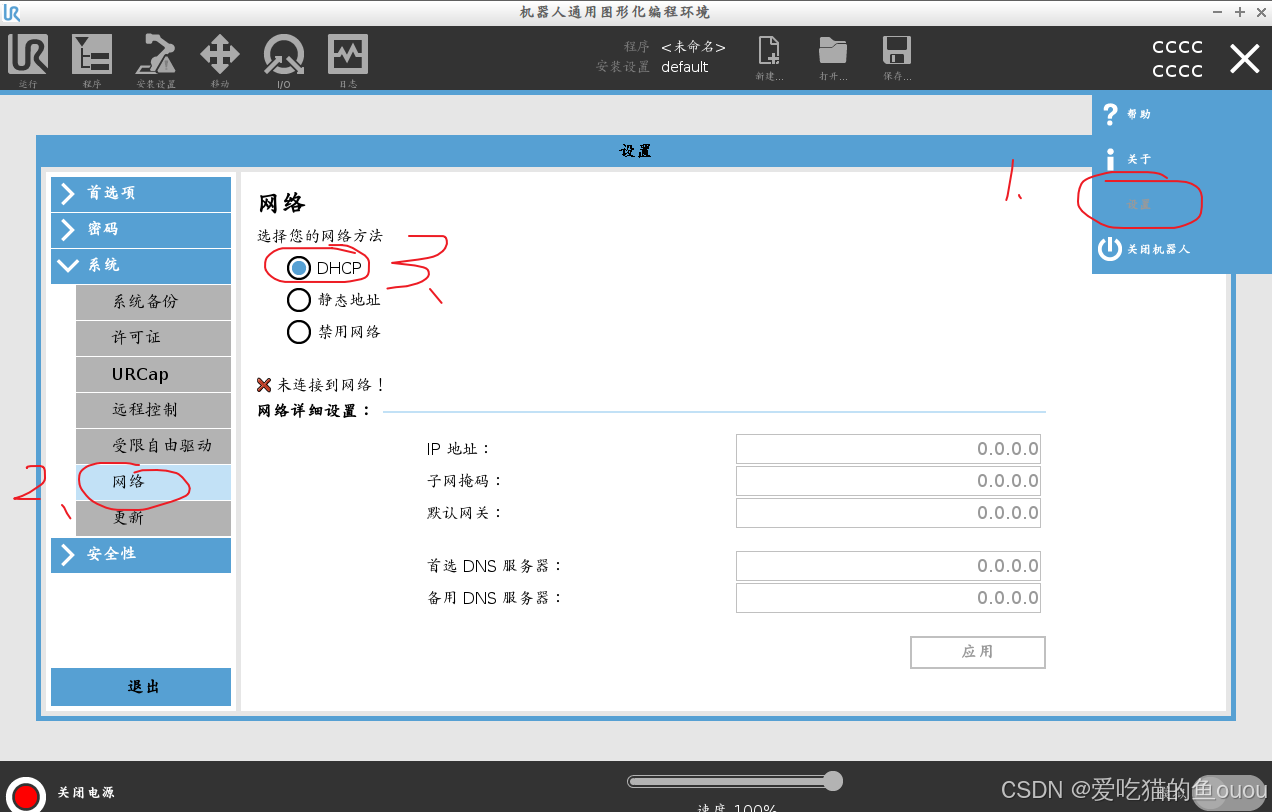
1.设置网络方法
启动URSim仿真软件,找到右上角:设置→系统→网络,选择第一个复选框DHCP。(注: URSim界面内的网络设置当前不允许用户设置静态IP地址。选择“静态地址”将允许您输入IP地址和网关,但实际不会将URSim配置为选择的地址。)
2.查找机器人IP地址
(1)打开终端UXTerm
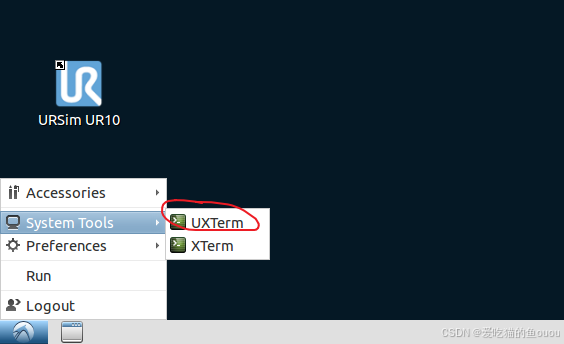
(2)输入命令ifconfig
记下eth0的IP地址,该地址是URSim中机器人的IP地址。此处为192.168.86.128。
ifconfig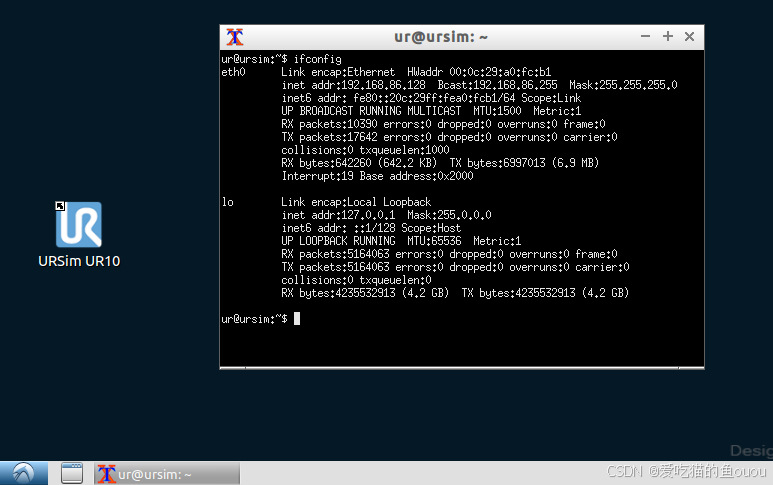
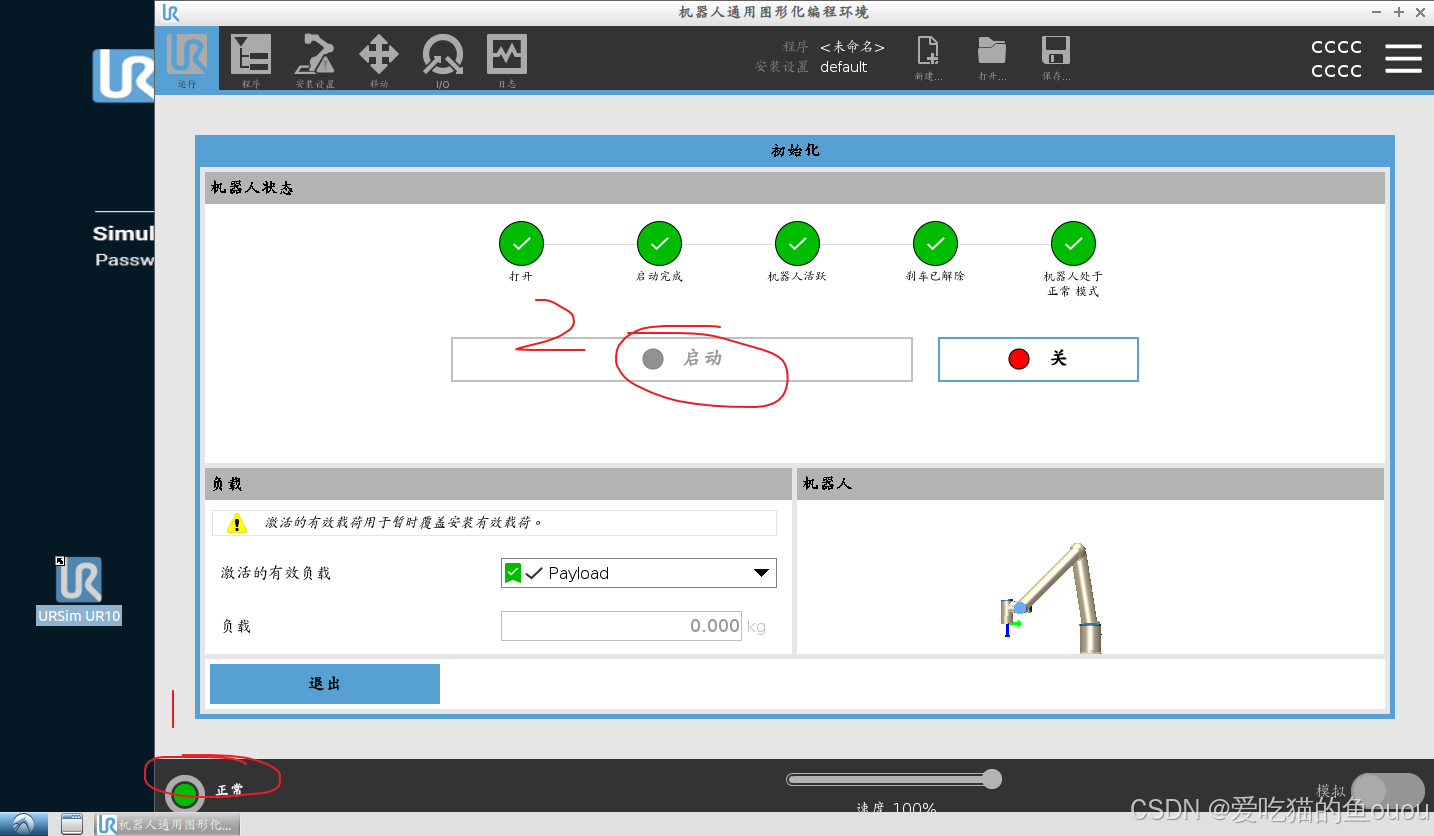
3.在URSim启动机器人
4.客户端与URSim建立连接
利用网络调试助手(或上位机)作为客户端,填写查到的机器人ip,通过30001/30002/30003其中一个特定的编程端口,与仿真软件建立连接。就可以在网络调试助手(或上位机)上按照URScript语言格式编写脚本程序,直接发送给机器人控制器,机器人就可以执行相应动作。
5.连接测试
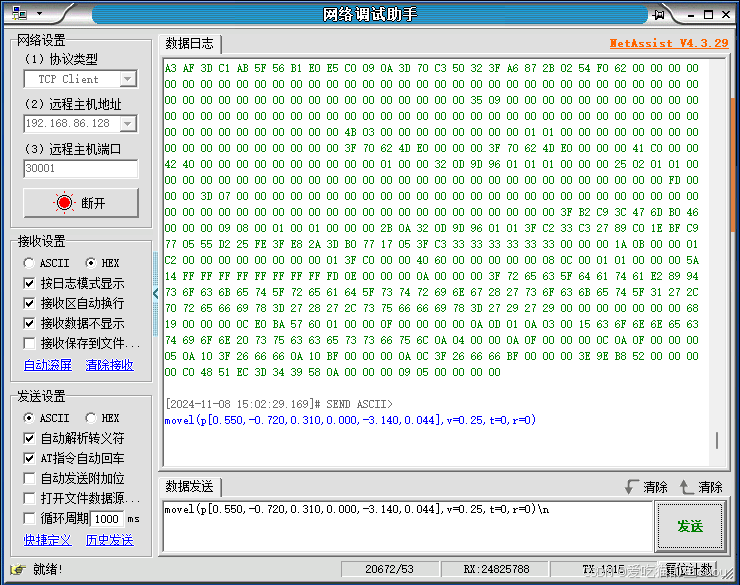
在输入框内输入movel(p[0.550,-0.720,0.310,0.000,-3.140,0.044],v=0.25,t=0,r=0)\n(注:位置单位均为m,角度单位均为弧度,速度单位为m/s,加速度单位为m/s2。指令后面必须加回车换行,即"\n"。)
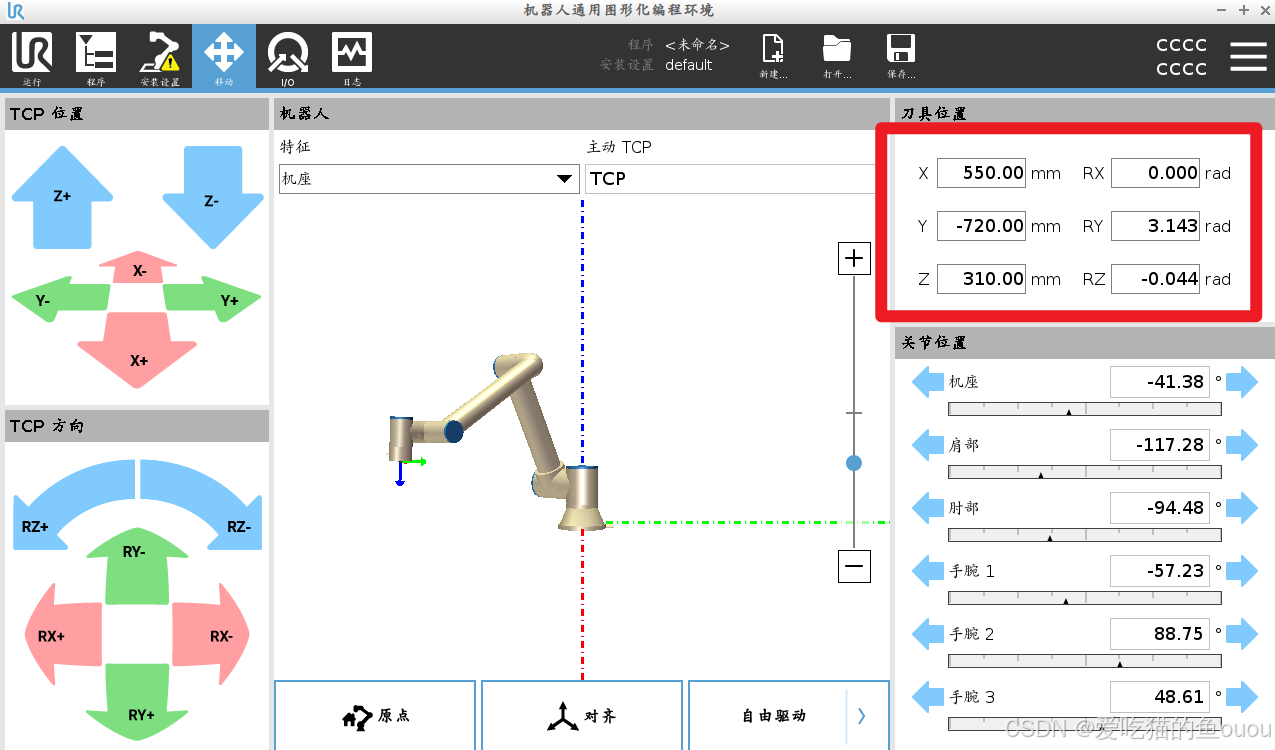
movel(p[0.550,-0.720,0.310,0.000,-3.140,0.044],v=0.25,t=0,r=0)\n机器人就会根据指令进行运动,至此完成了连接的测试。
三、电脑(服务端)连接URSim仿真软件(客户端)
1.查看电脑IP地址
本机IP地址为192.168.86.1
2.设置URSim的网络
与服务端同一个网段即可,这里设置为192.168.86.100
(1)打开终端UXTerm
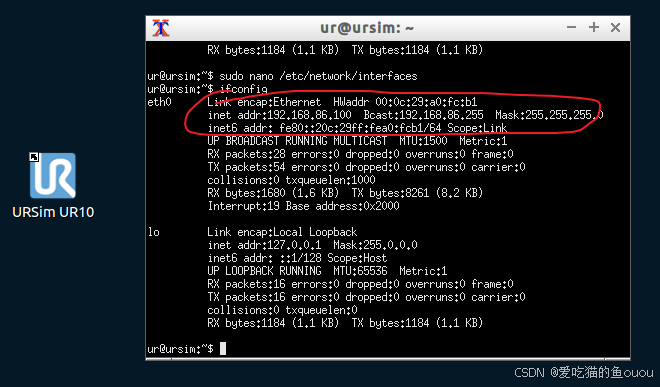
(2)输入命令sudo nano /etc/network/interfaces
sudo nano /etc/network/interfaces(3)输入命令后按回车会进入编辑界面,输入你要设置的IP地址
auto eth0
iface eth0 inet static
address 192.168.86.100
netmask 255.255.255.0
gateway 192.168.86.86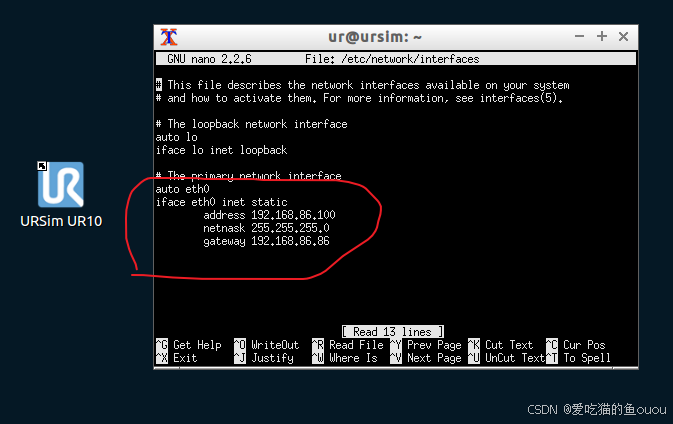
(4)依次进行操作:Crtl + O---->回车---->Ctrl + X ,即保存退出。
(5)重启UR即可解决问题。打开终端UXTerm查看,IP已经被修改。
3.在URSim编写程序
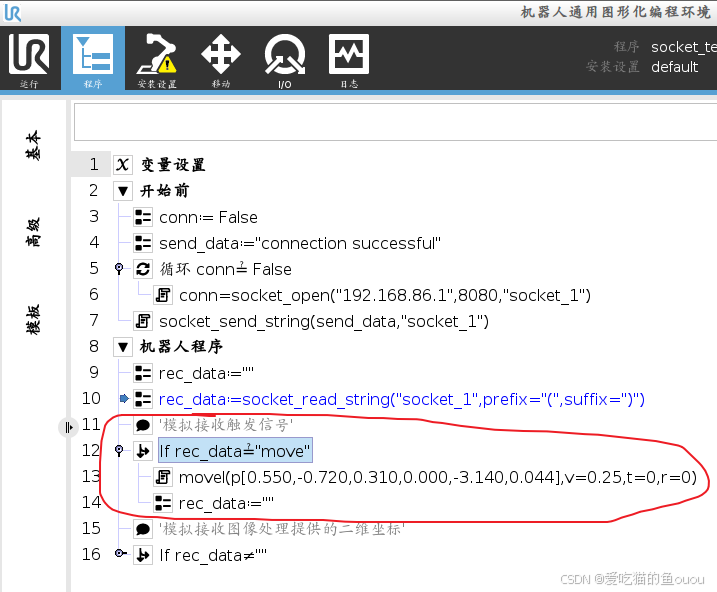
(1)建立socket通讯
URSim仿真软件编程socket代码,IP为192.168.86.1、端口号为8080。

(2)模拟接收触发信号
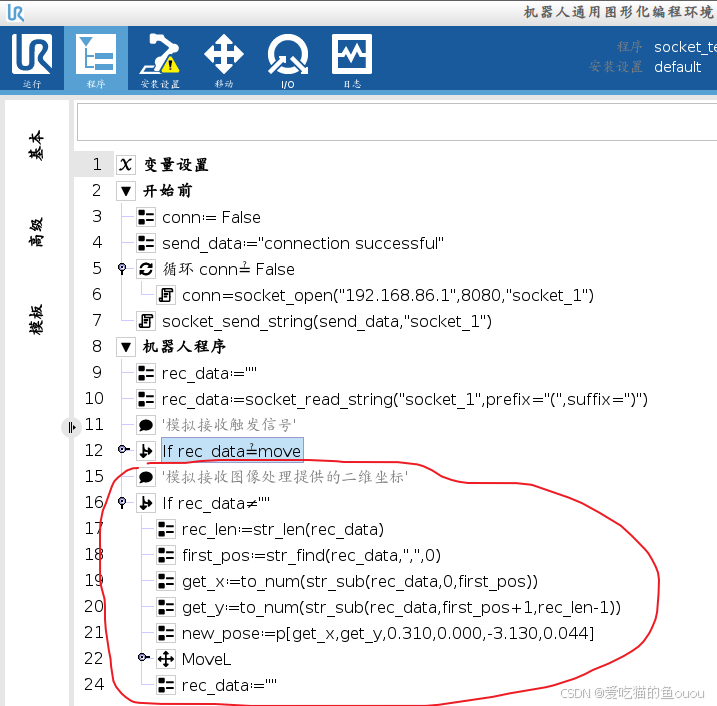
(3)模拟接收图像处理提供的二维坐标
4.服务端与URSim建立连接
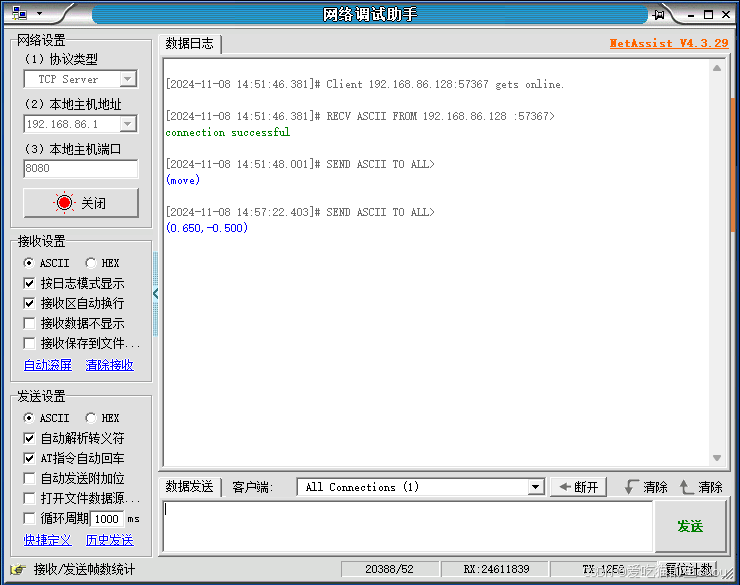
利用网络调试助手(或上位机)作为服务端,填写ip和端口号,与仿真软件建立连接。
5.连接测试
在输入框内输入(move)。
(move)机器人就会根据指令,判断并执行相应的机器人程序,至此完成了连接的测试。
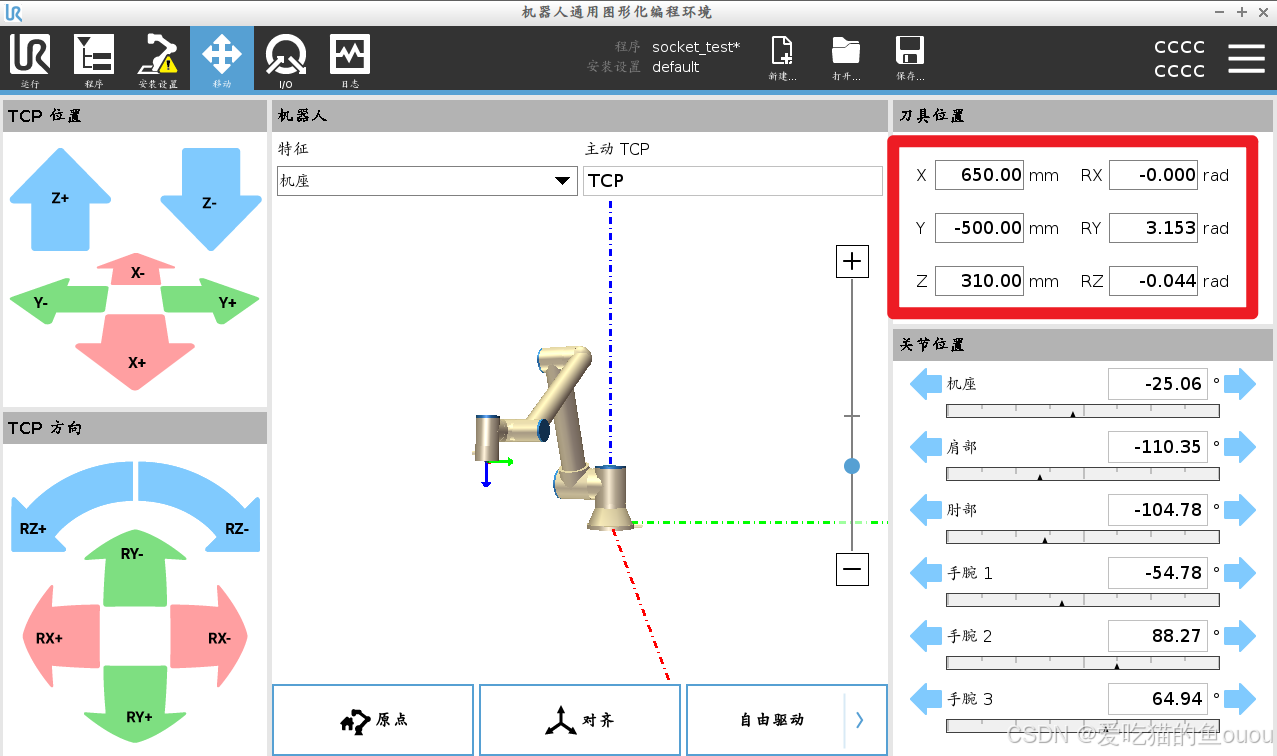
在输入框内输入(0.650,-0.500)。
(0.650,-0.500)机器人就会根据指令,判断并执行相应的机器人程序,至此完成了连接的测试。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









