







 本文深入解析TLD(Tracking-Learning-Detection)算法中的Learning阶段,重点介绍P-N Learning的学习策略,包括P-expert和N-expert的作用和实现,以及如何通过它们对检测器进行修正和性能提升。此外,还概述了TLD中的物体模型和综合器/结合器的原理。
本文深入解析TLD(Tracking-Learning-Detection)算法中的Learning阶段,重点介绍P-N Learning的学习策略,包括P-expert和N-expert的作用和实现,以及如何通过它们对检测器进行修正和性能提升。此外,还概述了TLD中的物体模型和综合器/结合器的原理。
在上一篇跟踪器与检测器(tracker and detector)中,我们已经详细介绍了TLD中跟踪器与检测器的设计方案,而在具体运行过程中需要对二者进行调和,所谓调和主要指两方面:
1.对二者输出的结果综合考虑,选择最有可能的作为最终的输出。
2.当目标跟踪中断再度出现时重新启动跟踪器;运行过程中对检测器进行更新,以适应目标运行过程中形变差异。
TLD中的Learning阶段主要思想已均在CVPR2010年的文章P-N Learning: Bootstrapping Binary Classifiers by Structural Constraints中提出。
TLD中的主体学习方法也是在其上稍作改进而得出。在本篇文章中,笔者将介绍学习阶段的任务及论文中涉及的目标模型(Object Model)与综合子(Integrator)。
本人博客地址:http://blog.csdn.net/outstandinger/article/details/9023151 转载请注明。
一,P-N Learning学习阶段
1.P-N Learning 综述
正如在TLD前言中所说,在TMD中Modeling即相当于后来提出的P-N Learning方式。P-N Learning 包含两个expert, 即 P-expert 与 N-expert.
据paper说明,前者作用在于识别missed detections(false negatives),也即寻找正样本;而N-expert 则用于识别false alarms(false positives),也即用于寻找负样本。
P-N学习的关键点在于利用两种 “expert” 可以对检测子进行修正,两种 “expert” 也可能会出错,但是经CVPR2010的文中证明,只要错误率低于0.5,检测器的性能由于两个 “expert” 相互独立的互补作用,性能将会得到改善。
具体实现框图如下,
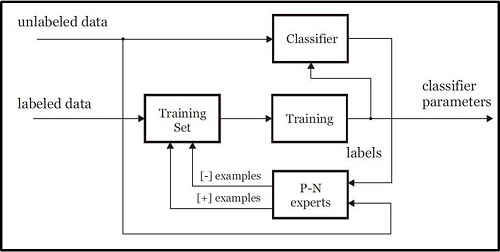
学习的结果即在于利用一个相对较小的标注集和,作为训练集训练初始分类器,对未标记集进行初始分类,然后经P-N expert
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6450
6450

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









