







 博客详细介绍了TLD(Tracking-Learning-Detection)系统中的跟踪器和检测器设计。跟踪器基于Median Flow,通过错误估计和失败检测确保跟踪质量;检测器则采用方差比较和组合分类器,最终通过最近邻分类器得出结果。TLD通过学习过程结合跟踪和检测,提升目标检测与跟踪的准确性。
博客详细介绍了TLD(Tracking-Learning-Detection)系统中的跟踪器和检测器设计。跟踪器基于Median Flow,通过错误估计和失败检测确保跟踪质量;检测器则采用方差比较和组合分类器,最终通过最近邻分类器得出结果。TLD通过学习过程结合跟踪和检测,提升目标检测与跟踪的准确性。
TLD论文中指出,单靠跟踪或单靠检测都无法完成现实的任务,而TLD的任务即在于结合两者的优势。
跟踪与检测的结合点即在于Learning学习过程。图示如下:
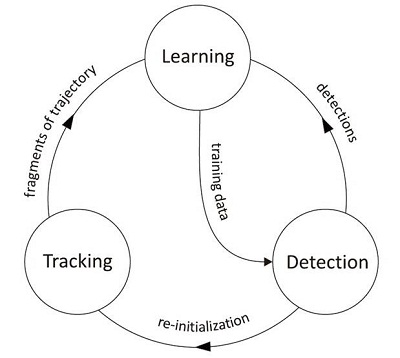
论文中将整个方案分为三部分,检测,跟踪,及学习。学习将综合检测与跟踪的结果输出,输出的结果可以作为检测子的训练数据,也可以作为对跟踪器重新初始化。
下面我们具体讲解一下跟踪子与检测子的实现方法。这也是TLD中主要的两部分,下一篇我将介绍一下我对学习过程的理解。
博客地址:http://blog.csdn.net/outstandinger/article/details/9019505
一,跟踪器
1,综述
跟踪器的实现主要基于作者的论文《Forward-Backward Error: Automatic Detection of Tracking Failures》。
该论文基于改进了基于Lucas-Kanade tracker光流的跟踪的方法,提出一种所谓的中指流(Median Flow)跟踪方法,这也是应用于TLD之中的跟踪器。
该跟踪器将在帧与帧之间估计物体运动,利用偏移和尺度的变化中值对整体效果进行更新。
具体框图如下:
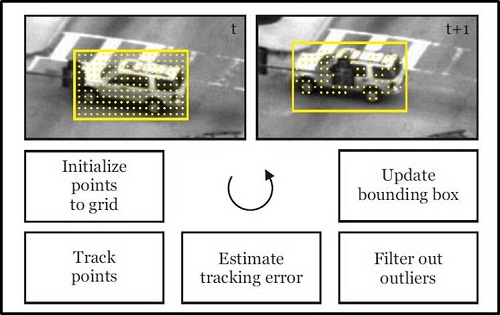
结合上图,在第 t 帧与 t+1 帧 之间的运行情况,我们在第 t 帧中初始化跟踪点框,然后利用经典的Lucas-Kanade tracker对各点进行跟踪,对跟踪得到的点进行错误估计(具体的错误估计方法下面介绍),去除跟踪效果不好的点&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6482
6482

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









