






永磁同步电机驱动器的自适应SDRE非线性无传感器速度控制(Matlab&Simulink实现)
ID:57500754213897733
被雨淋湿的花

永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)作为一种高效率、高功率密度的驱动器,被广泛应用于工业和交通领域。然而,由于其非线性特性和外界干扰的存在,实现精确的速度控制一直是一个挑战。为了解决这个问题,研究人员提出了自适应SDRE(Sliding-Mode Disturbance Observer-Based Robust Estimator)方法,该方法能够在无传感器的情况下实现PMSM的精确速度控制。
自适应SDRE方法是基于滑模扰动观测器(Sliding-Mode Disturbance Observer)的一种控制策略。传统的PMSM速度控制方法通常需要使用速度传感器来获取准确的速度反馈信号,然而,传感器的成本和故障率限制了其在实际应用中的使用。而自适应SDRE方法则能够通过估计扰动项和自适应补偿控制器来实现无传感器的速度控制。
在自适应SDRE方法中,首先需要对PMSM的数学模型进行建立。通过对PMSM的动力学方程进行推导和简化,可以得到PMSM的状态空间表达式。然后,引入扰动观测器来估计外界干扰和传感器误差对系统的影响。扰动观测器的设计需要考虑到系统的非线性特性和传感器的特性,以确保观测器能够准确估计扰动项。接下来,利用自适应补偿控制器来消除估计误差和实际系统之间的差异,从而实现精确的速度控制。
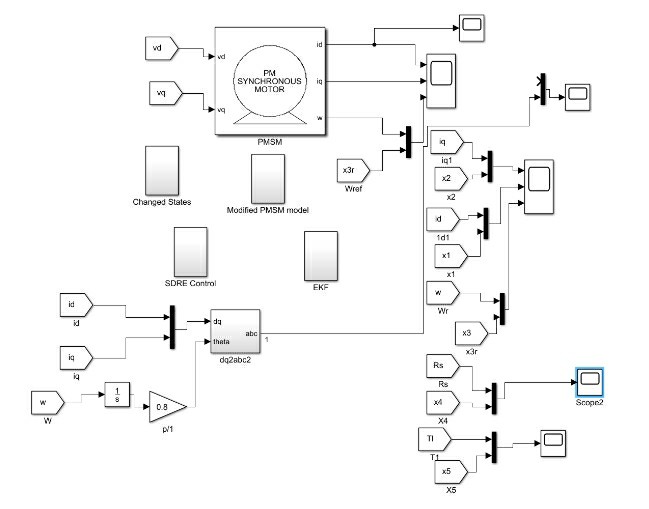
为了验证自适应SDRE方法的有效性,本文使用了Matlab&Simulink来搭建PMSM的仿真模型。通过对比传感器反馈控制方法和自适应SDRE方法的控制效果,可以发现自适应SDRE方法在无传感器的情况下能够实现更精确的速度控制,并且对外界干扰具有较强的鲁棒性。
总的来说,自适应SDRE方法为永磁同步电机驱动器的速度控制提供了一种新的思路和解决方案。通过使用滑模扰动观测器和自适应补偿控制器,可以实现无传感器的精确速度控制,并且具有较强的鲁棒性。该方法的实现主要依靠Matlab&Simulink软件,通过建立仿真模型进行验证。未来的工作可以进一步探索自适应SDRE方法在实际PMSM驱动系统中的应用,以及对控制器参数的进一步优化和调节。
以上相关代码,程序地址:http://fansik.cn/754213897733.html
















 169
169











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









