






carsim与simulink联合仿真(5)——轨迹跟随,车道保持,横向控制
提供carsim的cpar文件导入即可使用
提供simulink的mdl模型文件支持自己修改
提供模型说明文件
ID:1545672484900020
多不多啦米
在进行汽车动力学仿真时,常常需要通过联合使用Carsim和Simulink来完成。在上一篇文章中,我们介绍了如何将Carsim的cpar文件导入到Simulink中,以便进行联合仿真。本文将进一步探讨如何在联合仿真中实现轨迹跟随、车道保持和横向控制。
首先,让我们回顾一下Carsim的cpar文件。这个文件是Carsim的参数文件,包含了车辆的动力学参数、操纵参数、轮胎参数等信息。通过将cpar文件导入到Simulink中,我们可以直接在Simulink中对车辆的模型进行修改和调整。这使得我们可以根据具体需求对车辆的参数进行优化,从而提高仿真的准确性和可靠性。
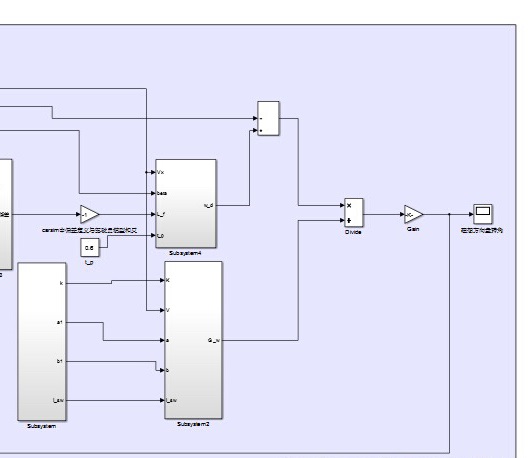
在联合仿真中,我们需要将Carsim的模型与Simulink的模型进行连接。这可以通过在Simulink中添加Carsim的S-Function模块来实现。在S-Function模块中,我们可以定义Carsim的输入和输出,并将其与Simulink模型的输入和输出进行连接。通过这种方式,我们可以将Carsim的动力学模型与Simulink的控制算法相结合,实现车辆的轨迹跟随、车道保持和横向控制。
在进行联合仿真时,我们可以使用Simulink中的控制算法来实现车辆的轨迹跟随。通过对车辆的轨迹进行分析和预测,我们可以确定车辆应该采取的行驶方向和速度。然后,我们可以使用Carsim的动力学模型来计算车辆的行驶轨迹,并将其反馈到Simulink中的控制算法中。通过不断调整控制算法的参数,我们可以实现车辆在不同条件下的轨迹跟随性能优化。
除了轨迹跟随,车道保持也是联合仿真中的一个重要任务。车辆的车道保持能力直接影响其在高速公路等道路上的安全性和稳定性。在Simulink中,我们可以使用不同的控制算法来实现车辆的车道保持功能。通过将Carsim的动力学模型与Simulink的车道保持控制算法相结合,我们可以实现对车辆的横向位置和姿态的控制,并将其保持在预定的车道中。
在进行横向控制时,我们可以使用各种控制器来实现。例如,常用的PID控制器、模糊控制器和神经网络控制器等。通过将车辆的状态和目标位置输入到控制器中,我们可以计算出控制指令,并将其发送给Carsim的动力学模型。然后,Carsim会根据控制指令调整车辆的横向运动,以实现车辆的横向控制。
总之,联合使用Carsim和Simulink可以实现对车辆的轨迹跟随、车道保持和横向控制等功能。通过在Simulink中导入Carsim的cpar文件,并将其与Simulink的模型进行连接,我们可以实现对车辆模型的修改和调整。然后,通过在Simulink中添加Carsim的S-Function模块,并结合不同的控制算法,我们可以实现车辆的轨迹跟随、车道保持和横向控制。通过不断优化控制算法的参数,我们可以提高车辆在不同条件下的性能表现,从而更好地满足实际应用的需求。
希望本文对您了解联合仿真中的轨迹跟随、车道保持和横向控制有所帮助。如果您在使用过程中遇到任何问题或有任何建议,请随时与我们联系。谢谢阅读!
注:本文中所提到的Carsim和Simulink是两个常用的汽车仿真工具,旨在帮助工程师进行汽车动力学仿真和控制算法开发。本文仅为技术讨论,不涉及任何商业推广。
相关的代码,程序地址如下:http://wekup.cn/672484900020.html
















 591
591











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









