最近在折腾关节机器人求解问题。要面临的第一个问题就是DH变换,关于puma560机器人的DH变换,不同地方出现不同版本,很是困惑。通过看这些不同版本的DH表,有些迷茫,有必要自己按规则走一遍。
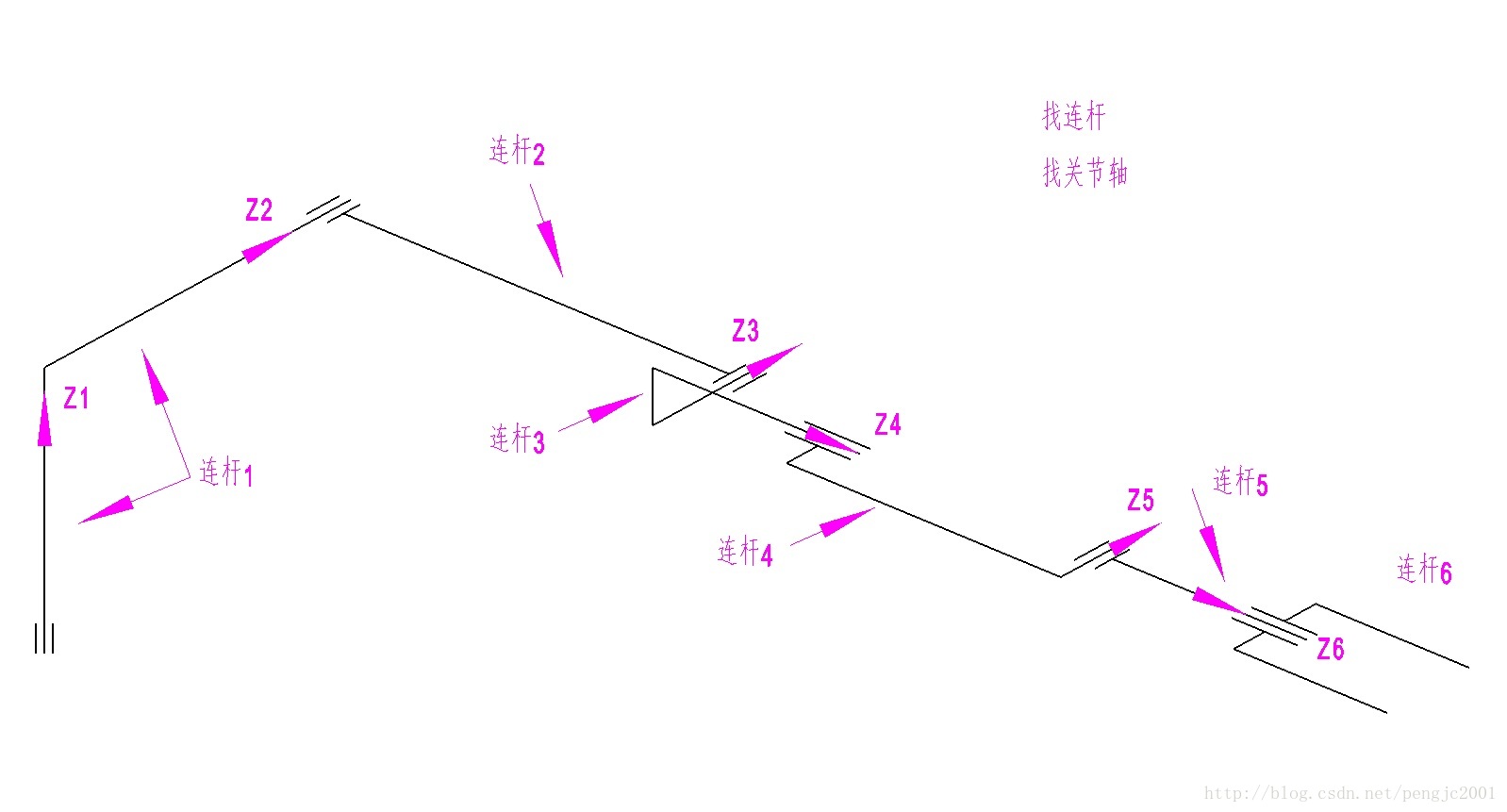
1、找连杆和关节轴
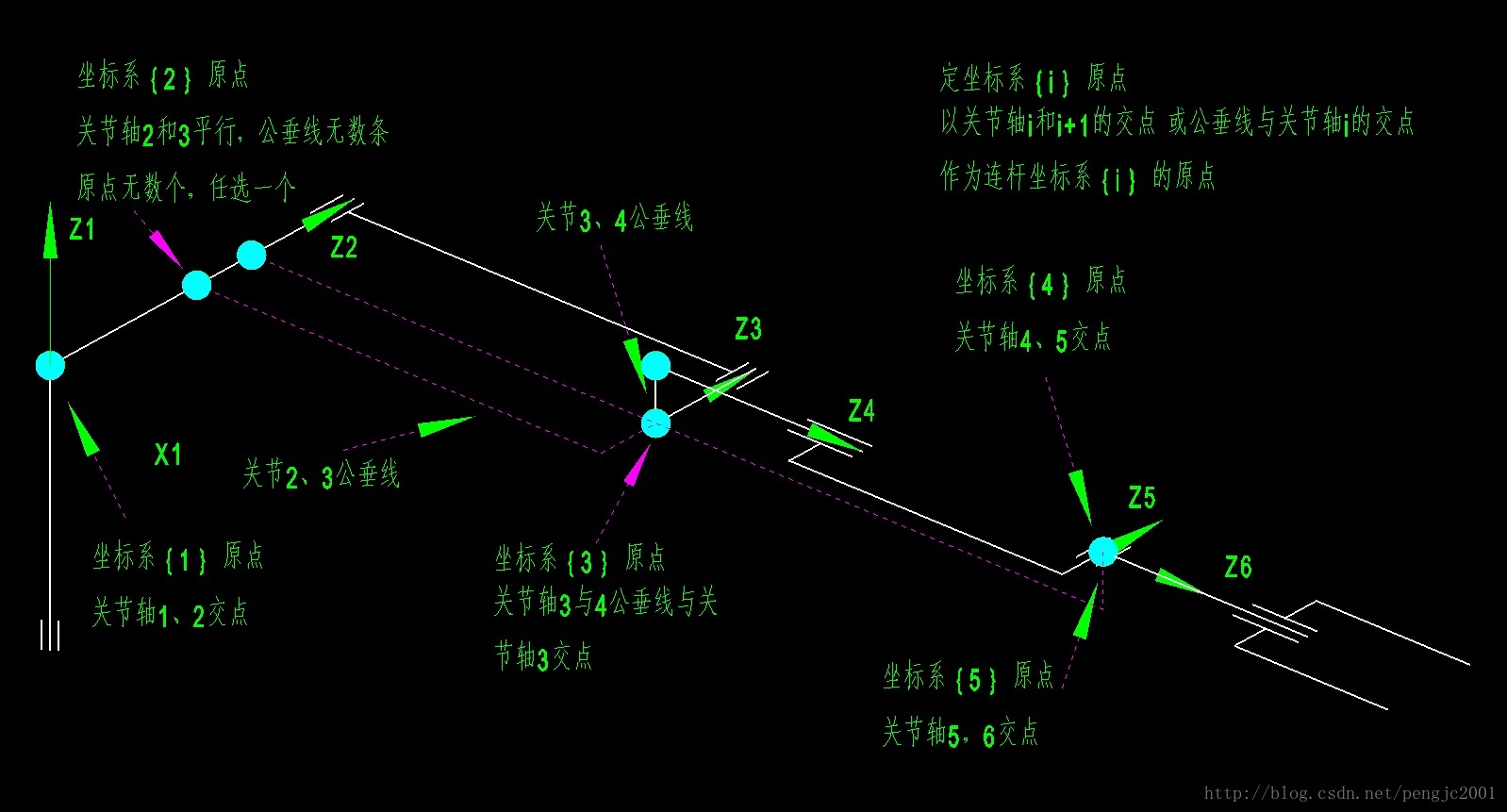
2、找连杆两关节轴线的交点或公垂线

3、定坐标系{i}的原点
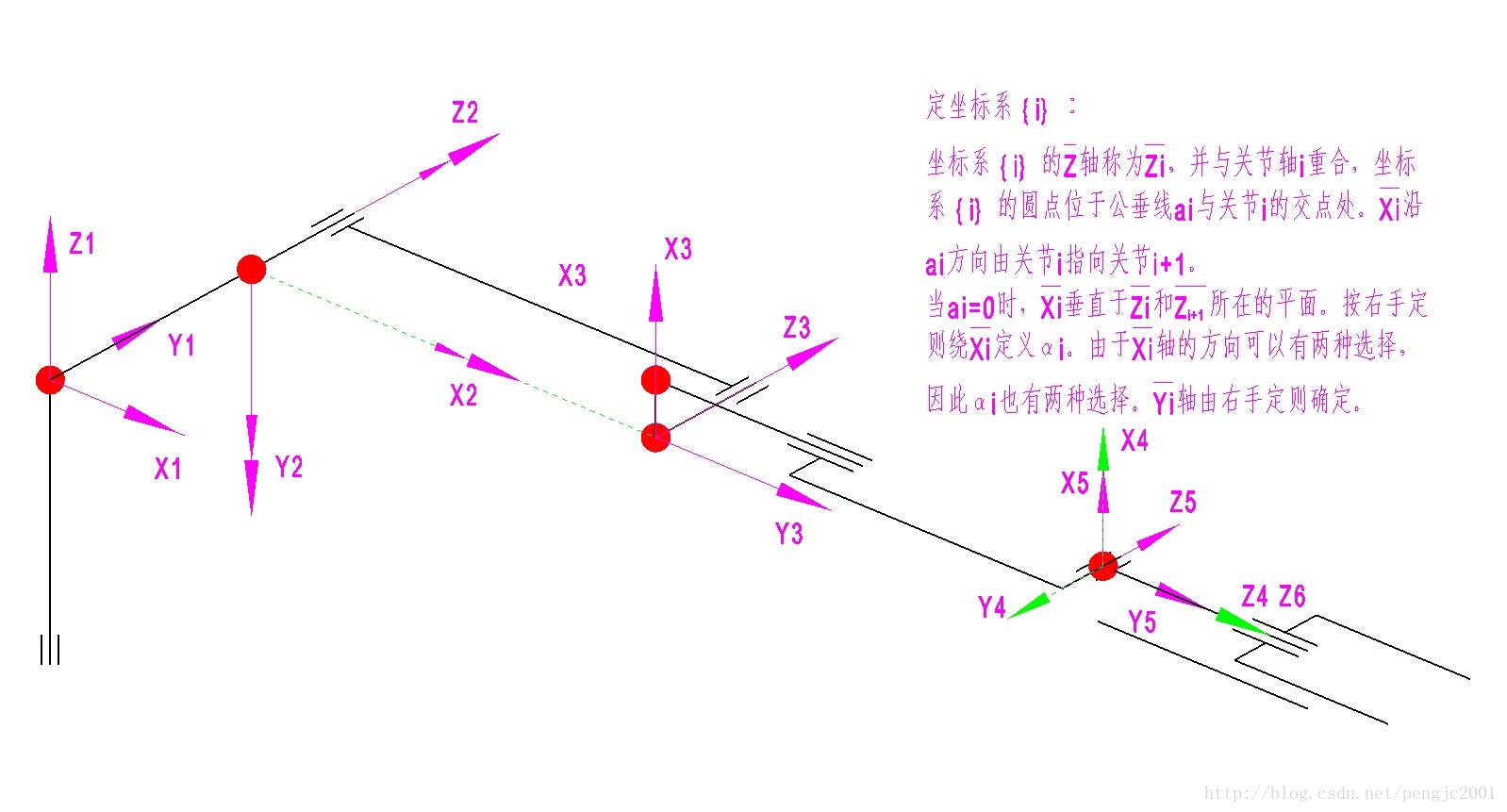
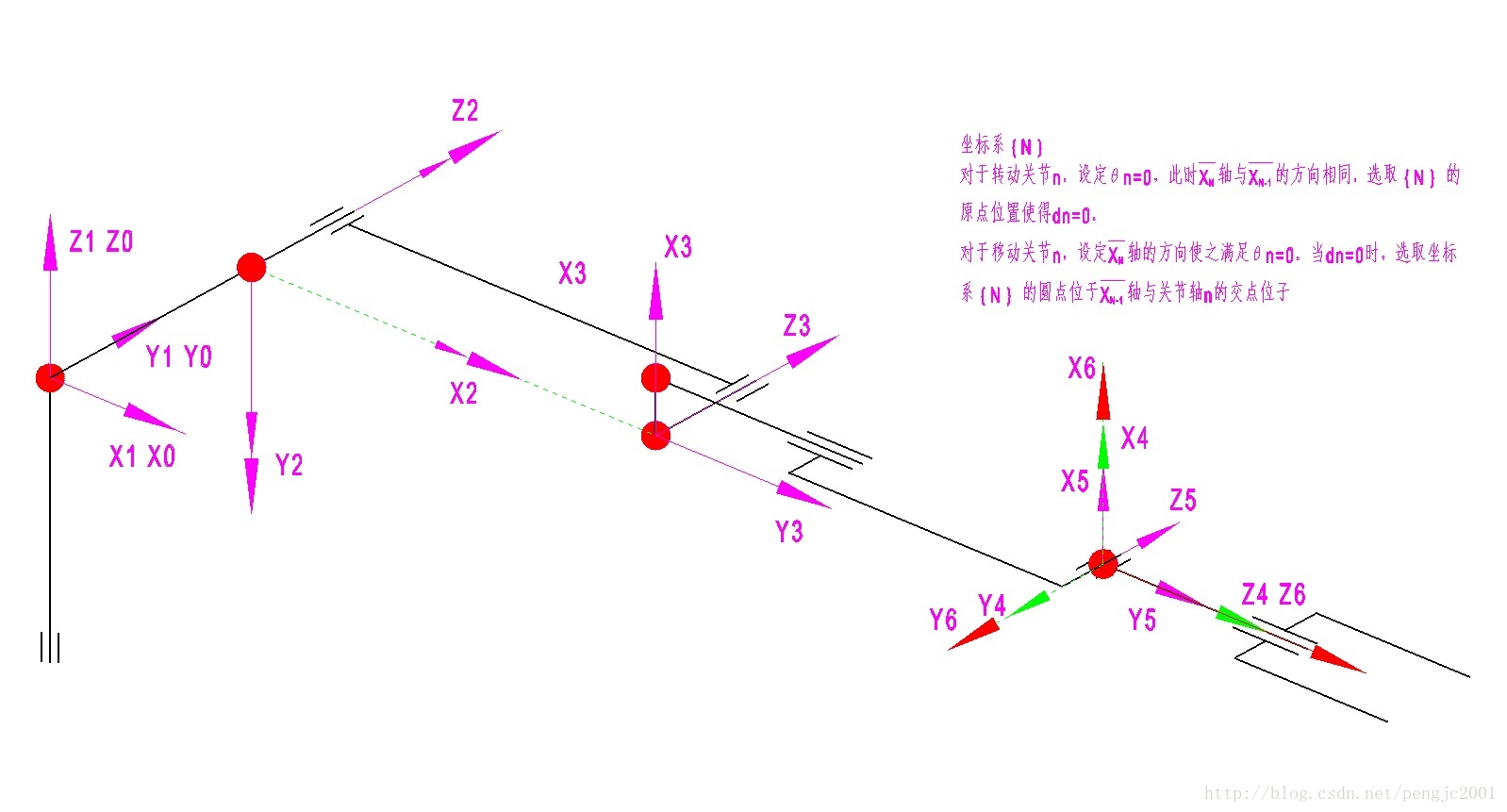
4、定坐标系{i}。 由于关节轴2平行于关节轴3,公垂线有无数条。因此坐标系{2}的选择无穷多,这也是参数多版本DH表的原因

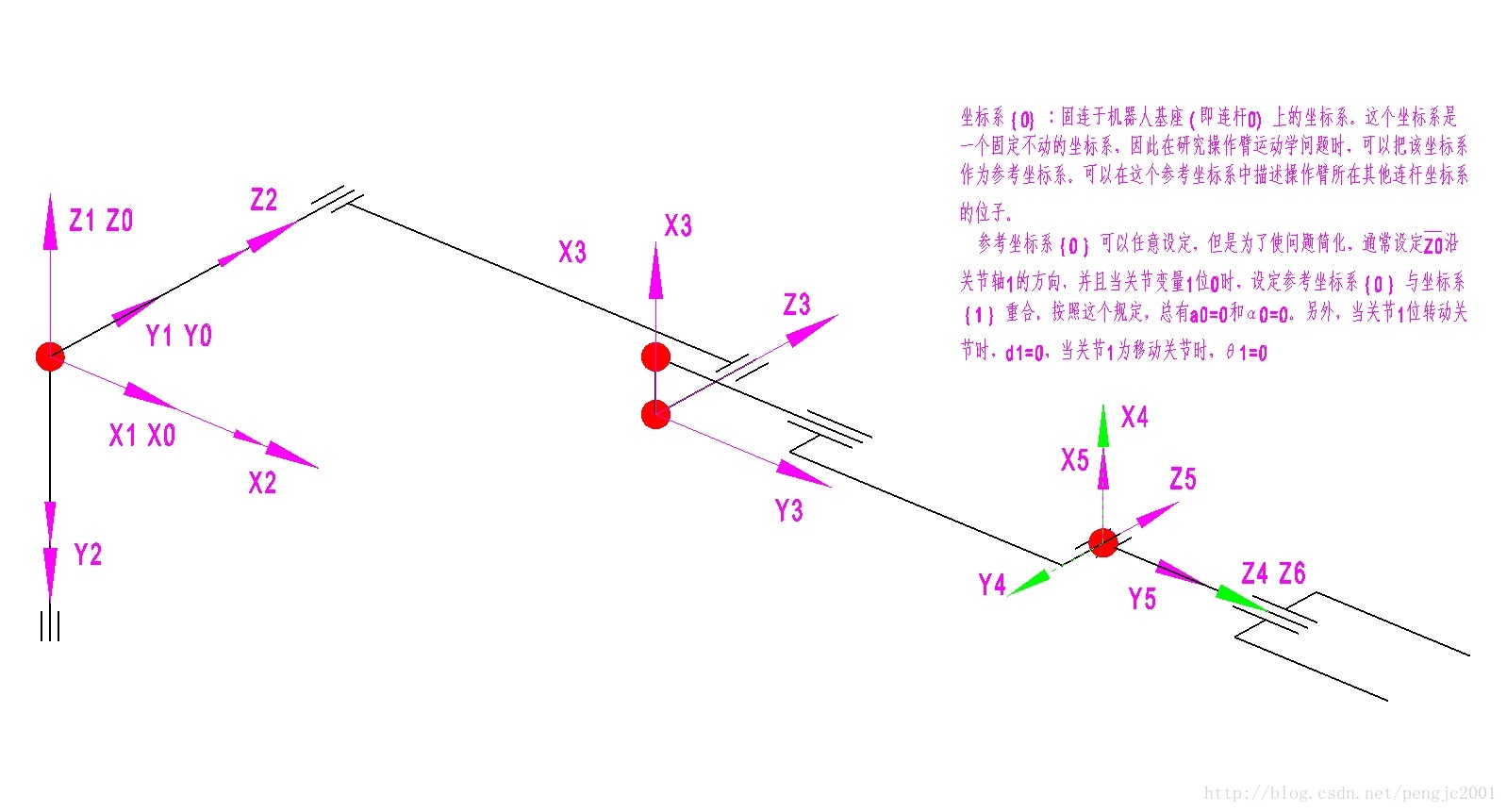
5、定坐标系{0}

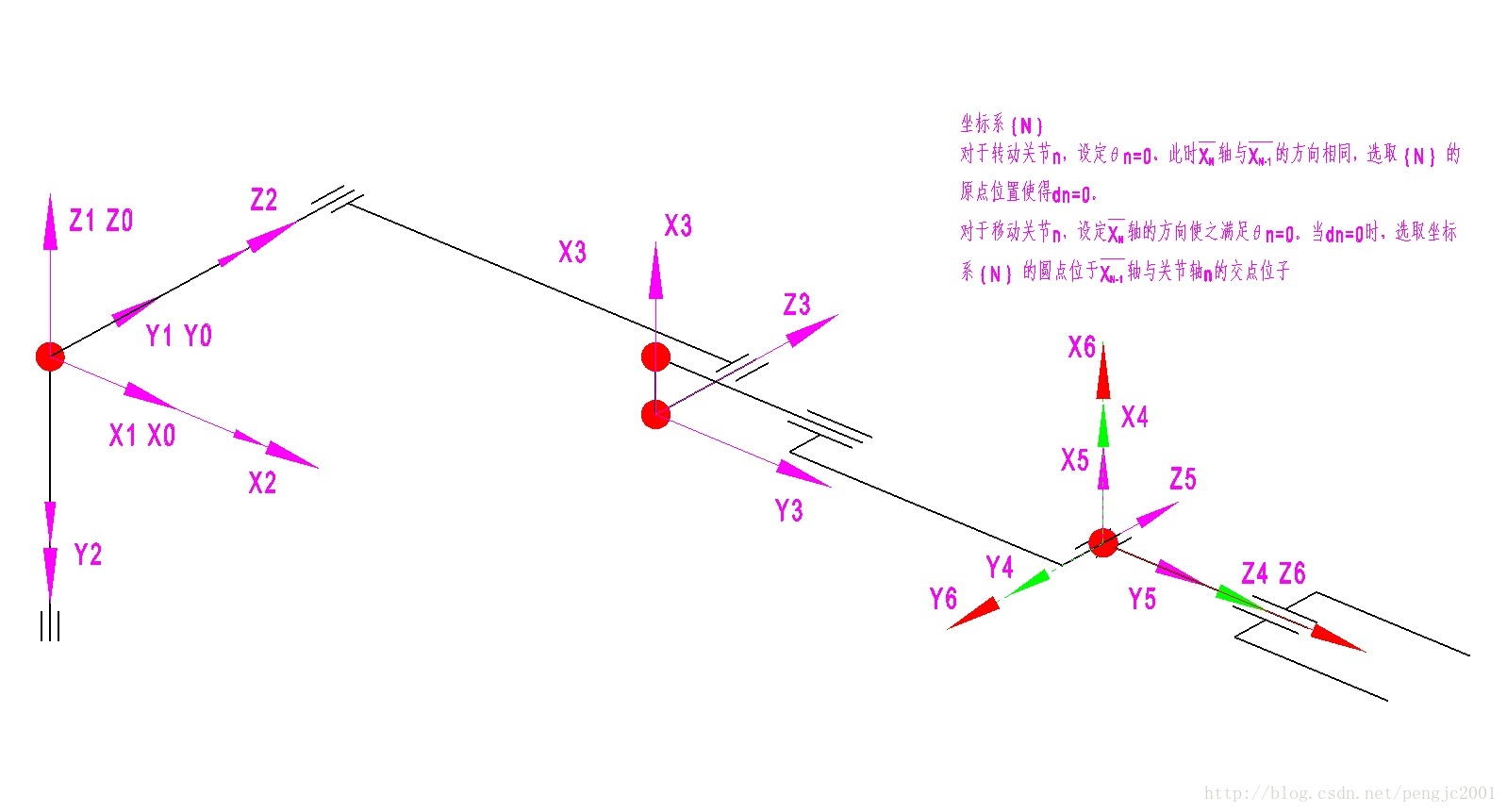
6、定坐标系{n}
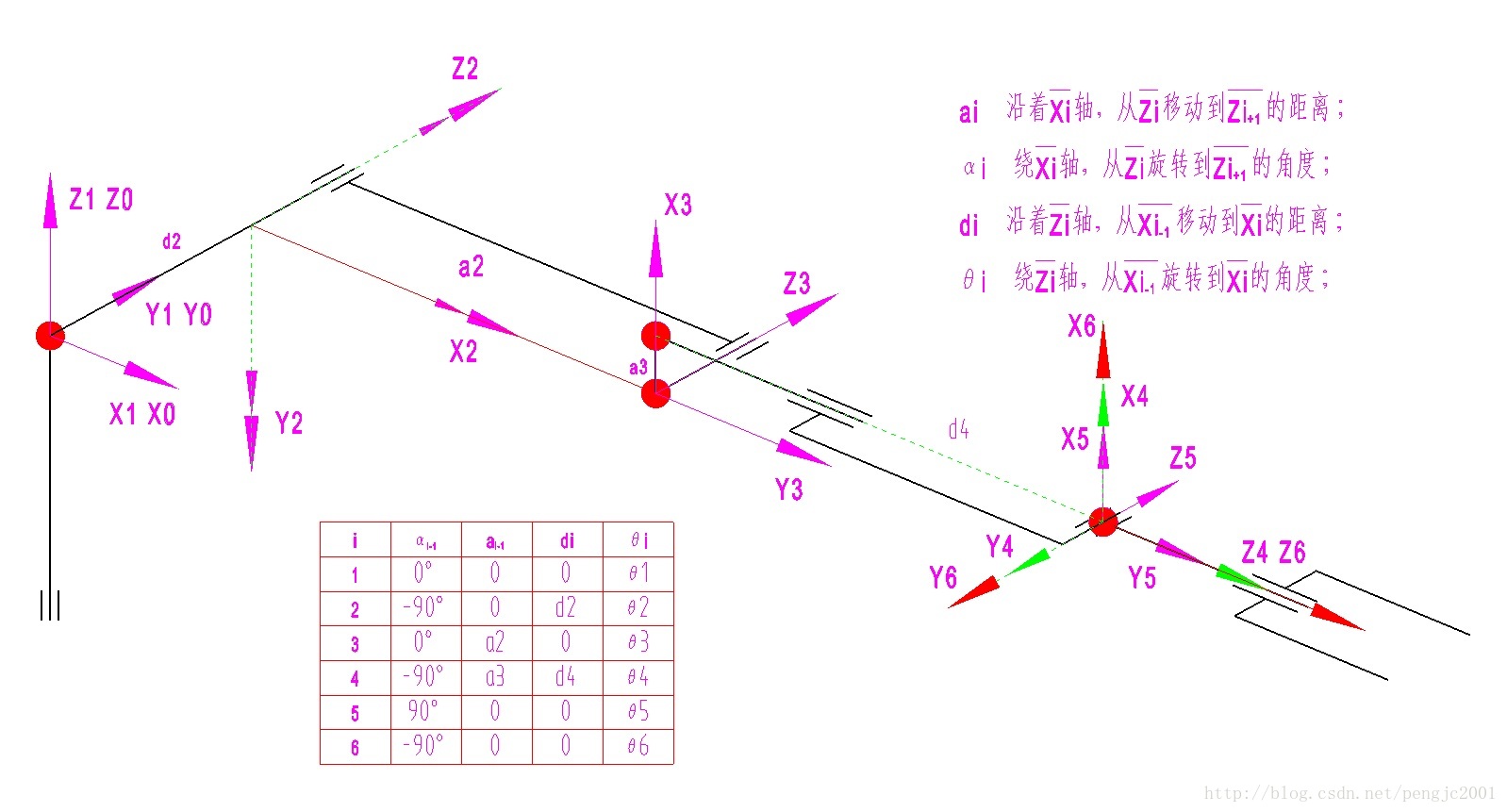
7、列DH表


最近在折腾关节机器人求解问题。要面临的第一个问题就是DH变换,关于puma560机器人的DH变换,不同地方出现不同版本,很是困惑。通过看这些不同版本的DH表,有些迷茫,有必要自己按规则走一遍。
1、找连杆和关节轴
2、找连杆两关节轴线的交点或公垂线
3、定坐标系{i}的原点
4、定坐标系{i}。 由于关节轴2平行于关节轴3,公垂线有无数条。因此坐标系{2}的选择无穷多,这也是参数多版本DH表的原因
5、定坐标系{0}
6、定坐标系{n}
7、列DH表
 5151
5151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言