







 本文探讨了足式机器人运动控制的发展,重点介绍了轨迹优化的重要性和应用。轨迹优化是通过最小化代价函数和满足约束来设计机器人的运动轨迹。文章通过实例解释了轨迹优化在航天、停车等领域的应用,并阐述了其在足式机器人上解决动力学约束和设计代价函数的方法。轨迹优化在复杂环境中的应用,如ANYmal和Spot机器人的实例,展示了其在机器人运动控制中的潜力。
本文探讨了足式机器人运动控制的发展,重点介绍了轨迹优化的重要性和应用。轨迹优化是通过最小化代价函数和满足约束来设计机器人的运动轨迹。文章通过实例解释了轨迹优化在航天、停车等领域的应用,并阐述了其在足式机器人上解决动力学约束和设计代价函数的方法。轨迹优化在复杂环境中的应用,如ANYmal和Spot机器人的实例,展示了其在机器人运动控制中的潜力。
“
运动控制技术的进步使得足式机器人的运动能力更强,而近来轨迹优化作为主流学术研究方向,能够为足式机器人运动控制的发展提供可能的指引。本期技术干货,我们邀请到了小米工程师徐喆,向我们介绍足式机器人运动控制的发展方向——轨迹优化。
”
一、前言
足式机器人的运动控制技术在近几十年取得了巨大的发展,80年代Marc Raibert提出的经典三分控制方法,实现了高动态的运动,也为后来Boston Dynamics的发展奠定了基础;90年代本田机器人研究院利用零力矩点控制(ZMP)实现了全尺寸仿人机器人Asimo的行走、奔跑和舞蹈,也代表了当时足式机器人的最高成就;新世纪以来,随着无框力矩电机的技术革命、计算机算力的持续增强和工业总线技术的发展,复杂的运动控制技术如全身运动控制(WBC)、模型预测控制(MPC)在足式机器人上应用成为了主流,足式机器人也如雨后春笋一样迎来了蓬勃的发展,像Boston Dynamics的Atlas、Spot机器人,MIT大学的Cheetah系列机器人、瑞士ETH大学的ANYmal系列机器人开始进入大家的视野。
虽然运动控制算法的发展给足式机器人带来更强的运动能力,但是与足式生物相比,机器人的运动能力仍然显得不足,那么未来足式机器人运动控制的发展方向会是什么呢?这篇文章会跟大家分享一个可能的方向——轨迹优化。
二、轨迹优化
>>>>1.什么是轨迹优化
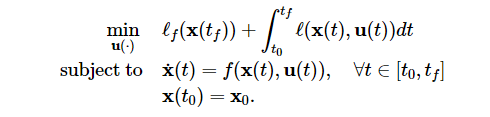
轨迹优化指的是在满足某些约束的情况下,通过最小化代价函数,来设计一条轨迹的过程 [1]。用数学可以表示为如下形式,其中min中的部分就是代价函数,subject to中的内容就是约束,求解这个问题之后,就可以得到状态x和控制输入u随时间变化的轨迹。
轨迹优化的算法已经有将近100年的历史,但是由于其庞大的计算量,在计算机技术面世之后轨迹优化才被应用到实际中。最早使用轨迹优化的是航天航空和军事领域,例如SpaceX计算回收火箭下落的轨迹,就是一个典型的轨迹优化问题。如视频所示,火箭的初始状态是平行于地面的,轨迹优化需要解决的问题就是找到一条轨迹,让火箭竖直落在标靶附近。在这个例子中,需要满足的约束包括火箭的动力学模型、火箭的推力和加速度限制等;代价函数用来描述火箭落地的位置与指定位置的距离,一般用二次型来表示。最后,利用求
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









