




 文章详细介绍了机器人灵巧手的发展历程,从早期的Okada、Stanford/JPL和Utah/MIT灵巧手到现代的高集成度和感知能力增强的型号。讨论了传动方式如腱传动、连杆传动、齿轮传动和人工肌肉,并举例了不同类型的灵巧手。文章指出,尽管技术不断进步,但深度仿生、柔性感知、信息融合和成本控制仍是当前面临的挑战。最后,分享了一些经典案例,如Schunk、OttobockBeBionic和PISA/IITSoftHand。
文章详细介绍了机器人灵巧手的发展历程,从早期的Okada、Stanford/JPL和Utah/MIT灵巧手到现代的高集成度和感知能力增强的型号。讨论了传动方式如腱传动、连杆传动、齿轮传动和人工肌肉,并举例了不同类型的灵巧手。文章指出,尽管技术不断进步,但深度仿生、柔性感知、信息融合和成本控制仍是当前面临的挑战。最后,分享了一些经典案例,如Schunk、OttobockBeBionic和PISA/IITSoftHand。
“
灵巧手作为机器人操作和动作执行的末端工具在机器人学领域被称之为末端执行器(End-Effector),如同“百达翡丽”般昂贵和精密。本期技术干货,我们邀请到了小米工程师——张佳俊,以机器人多指灵巧手为主要讨论对象,从灵巧手的发展历程到具体传动形式实现,结合部分案例全方位多角度阐述灵巧手的发展与应用。
”
一、前言
末端执行器是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的装置。末端执行器作为机器人与环境相互作用的最后环节与执行部件,对提高机器人的柔性和易用性有着极为重要的作用,其性能的优劣在很大程度上决定了整个机器人的工作性能。
二、灵巧手的发展历程
机器人多指灵巧手的研究始于20世纪70 年代,图1所示为日本“电子技术实验室”的Okada 灵巧手,该灵巧手具有3个手指和一个手掌,拇指有3 个自由度,另外两个手指各有4个自由度,采用电机驱动和肌腱传动方式。
图2所示为20世纪80年代初美国斯坦福大学研制成功的Stanford/JPL灵巧手,该手有3个手指,每指各有3自由度,采用12个直流伺服电机作为关节驱动器,采用腱驱动系统传递运动和动力。
图3所示为美国麻省理工学院和犹他大学联合研制的Utah/MIT 灵巧手,该手具有完全相同的4个手指,每个手指有4个自由度,同样采用腱驱动系统传递运动和动力,整手有16个关节,驱动器数量达到了32个。上述三只灵巧手是该领域研究初始阶段的典型代表,为后续仿人型多指灵巧手研究建立了理论基础。
 图1 Okada 灵巧手 | 图2 Stanford/JPL 灵巧手 | 图3 Utah/MIT 灵巧手
图1 Okada 灵巧手 | 图2 Stanford/JPL 灵巧手 | 图3 Utah/MIT 灵巧手
20 世纪末,随着嵌入式硬件的发展,多指灵巧手的研究向着高系统集成度和丰富的感知能力提升的方向发展,进入了快速发展阶段。美国国家航空宇航局研制了用于国际空间站舱外作业的宇航员灵巧手Robonaut hand,由1个手腕和5个手指组成,共14个自由度,腱绳张力传感器的加入使得整手的运动控制更加准确。
德国宇航中心先后研制成功了DLR-Ⅰ和DLR-Ⅱ灵巧手,共集成了25个传感器,包括类似人工皮肤的触觉传感器、关节扭矩传感器、位置传感器和温度传感器等,使灵巧手在灵活性和感知能力方面都有显著提升。意大利IIT研制的iCub手高度集成了12个触觉传感器,48个压力传感器和17个位置传感器以实现灵巧的操作和丰富的感知能力,系统集成度的提高和感知能力的丰富使得多指手向灵巧操作的方向更进了一步。
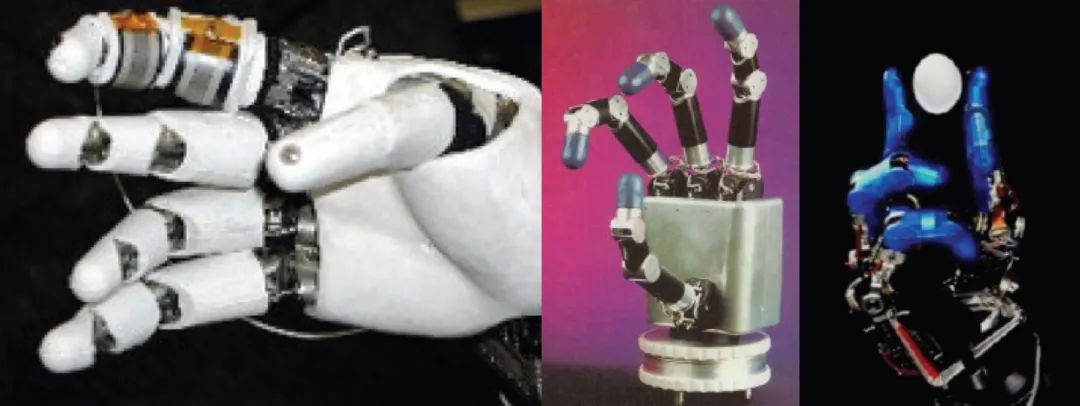
图4 Robonaut hand | 图5 DLR-I | 图6 DLR-Ⅱ
图7 IIT-iCub
高系统集成的灵巧手具有灵活性和功能性的优势,但是复杂的系统导致了高额的制造成本并且降低了系统的可靠性和易维护性。因此近10年,多指灵巧手设计的一个重要方向是简化系统与提高鲁棒性。
欠驱动灵巧手通过合理的结构设计以少于手指关节自由度的驱动器控制手的运动,以降低整只手的系统复杂度,同时提高可靠性。凡事均有利弊,欠驱动手虽然在一定程度上以较低的成本、简化的系统实现了高鲁棒性的抓取任务,但是由于欠驱动自身特性使得该类手在操作方面的能力受到了限制,这也是机器人手设计中的鲁棒性和功能性之间辩证取舍的结果。
总结成一句话就是:在紧凑、高效、与可靠性的前提下完美“复制”人手高自由度的灵巧性,依然还有很长的路要走。
三、灵巧手实现形式
>>>> 3.1 人手自由度分析
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2159
2159

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









