







| 实验5基于Simulink控制系统的稳定误差分析 |
| 一、实验目的: 1、通过学习本实验内容,学生能够掌握Simulink仿真环境进行控制系统稳态误差分析的方法; 2、研究系统在不同典型输入信号作用下,稳态误差的变化。 |
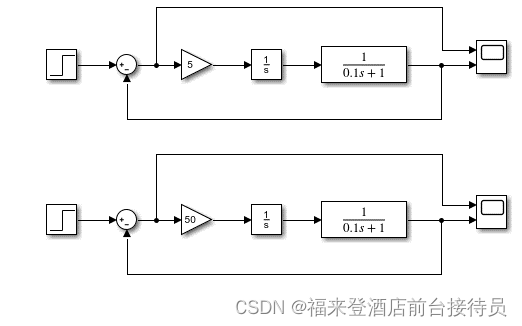
| 二、实验步骤: 1、 四、实验总结: 利用simulink绘制高阶系统的典型输入型号的响应曲线,研究系统在不同典型输入信号作用下,稳态误差的变化。 (1)阶跃输入响应 已知一个单位负反馈系统开环传递函数为G(s)=K/s(0.1s+1),分别作出K=5和K=50时,系统单位阶跃响应曲线并求单位阶跃响应稳态误差,总结实验结论。
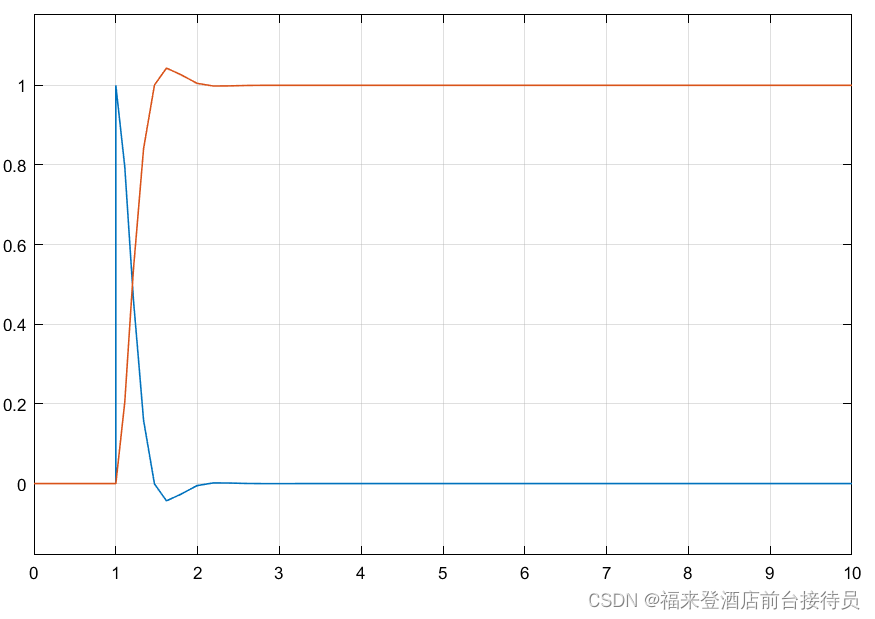
图 5-1 基于Simulink I型系统单位阶跃响应结构图 1、(1)K=5时I型系统阶跃输入误差响应曲线:
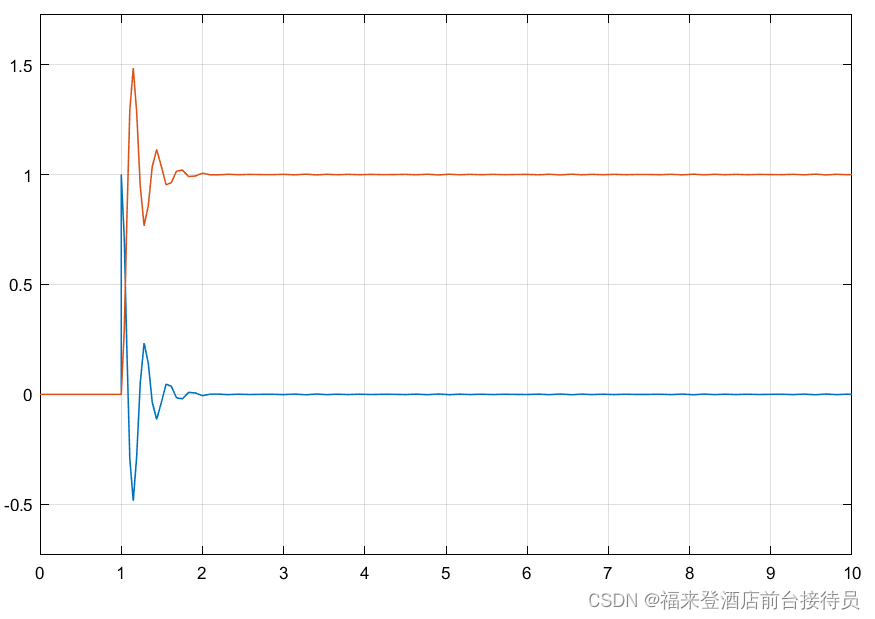
K=50时I型系统阶跃输入误差响应曲线:
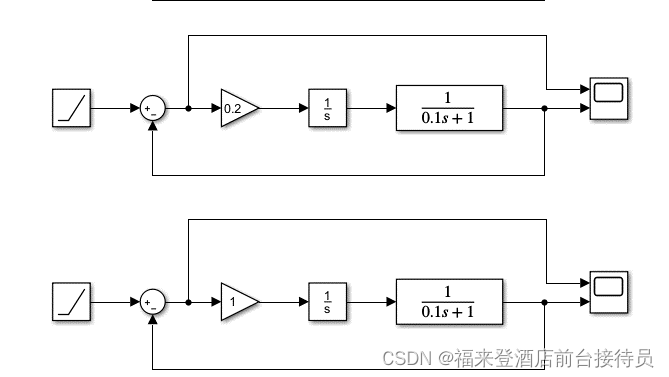
结论:稳态误差为零。 随着K增大,响应过程变快,但终值不变。 (2)斜坡输入响应 仍然上述系统,分别作出K=0.2 B和K=1时,系统单位斜坡响应曲线并求单位斜坡响应稳态误差,总结实验结论。
图 5-2基于Simulink I型系统单位斜坡响应结构图 (2)K=0.2时I型系统斜坡输入误差响应曲线:
K=1时I型系统斜坡输入误差响应曲线:
结论: K越大,响应越快,稳态误差不变 2、研究系统型次不同,稳态误差的变化。 (1)0型系统在典型输入信号作用下的稳态误差 将上述系统中的积分环节改换为一个惯性环节,开环增益改为1,系统变成0型系统。
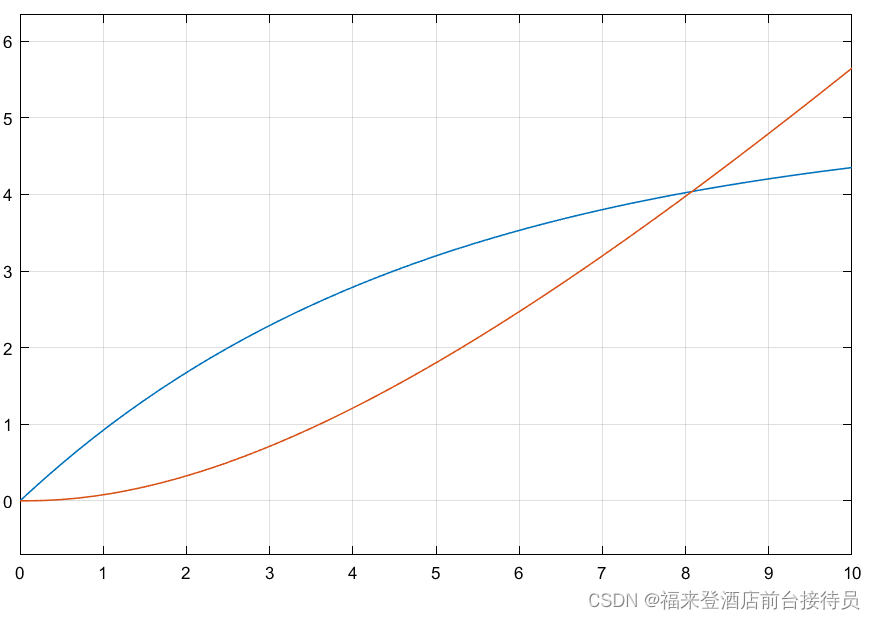
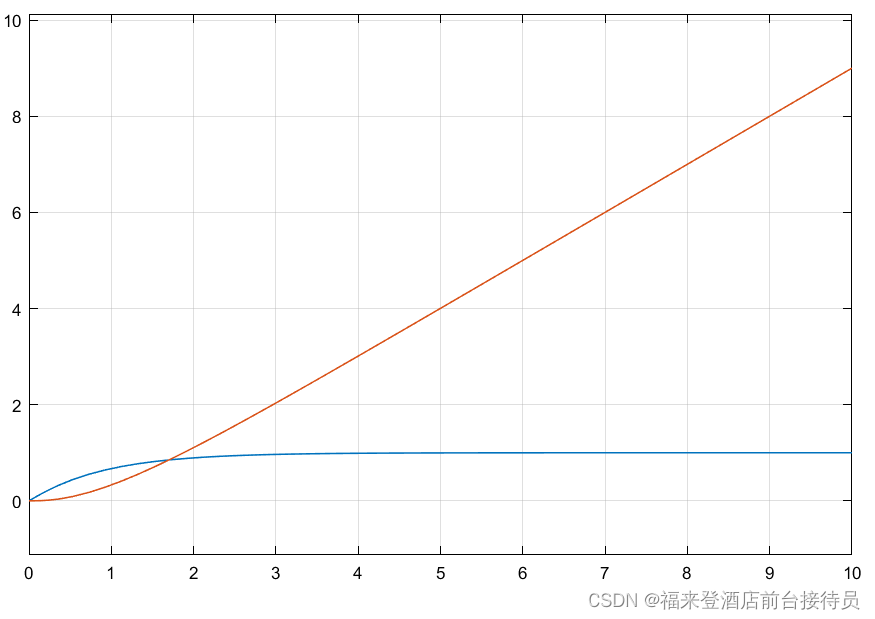
图5-3基于Simulink 0型系统单位阶跃响应误差分析图 在输入端分别给定单位阶跃信号和单位斜坡信号,重新仿真运行,在示波器 Scope 中观察系统响应曲线,并读出稳态误差,总结实验结论。 (1)输入信号为Step的曲线图:
(2)输入信号为Ramp的曲线图:
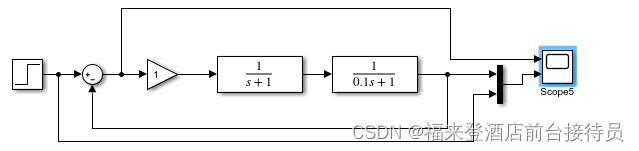
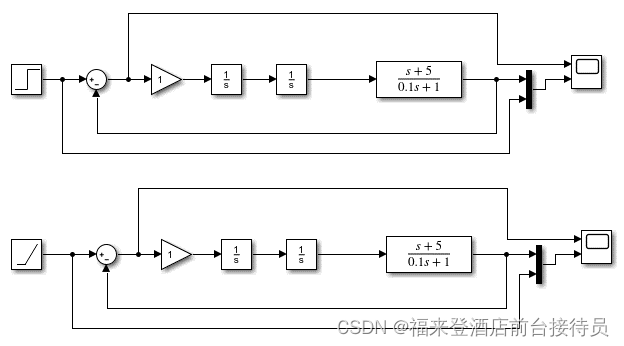
(2)II型系统在典型输入信号作用下的稳态误差 将上述系统中开环增益改为1,在其前向通道中再增加一个积分环节,系统变成II型系统。在输入端分别给定单位阶跃信号和单位斜坡信号,重新仿真运行,在示波器 Scope 中观察系统响应曲线,并读出稳态误差,总结实验结论。最后,对系统型别、稳态误差和输入信号形式进行归纳,填写表5-1。
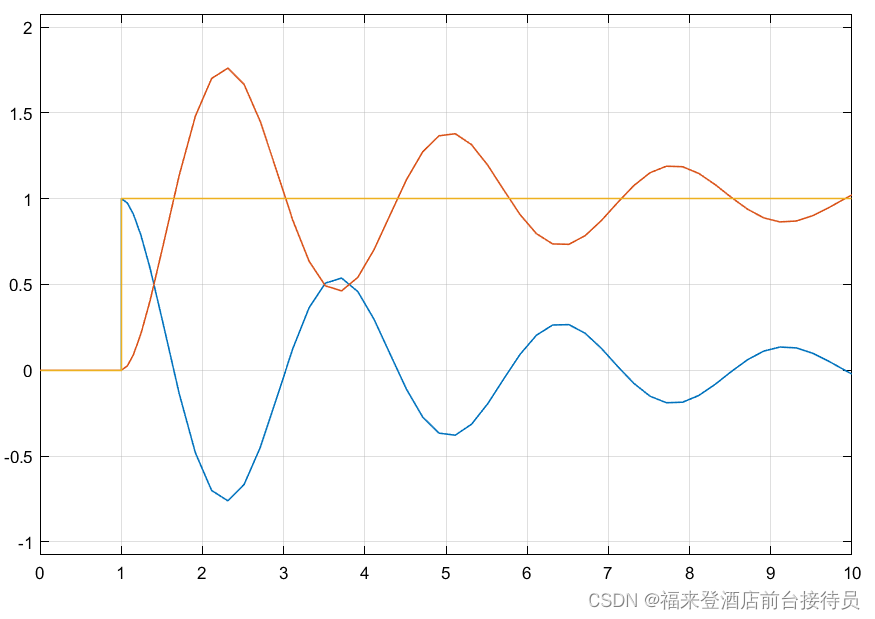
图 5-4基于Simulink II型系统单位阶跃和单位斜坡响应误差分析图 (2)输入为Step时的曲线图:
|
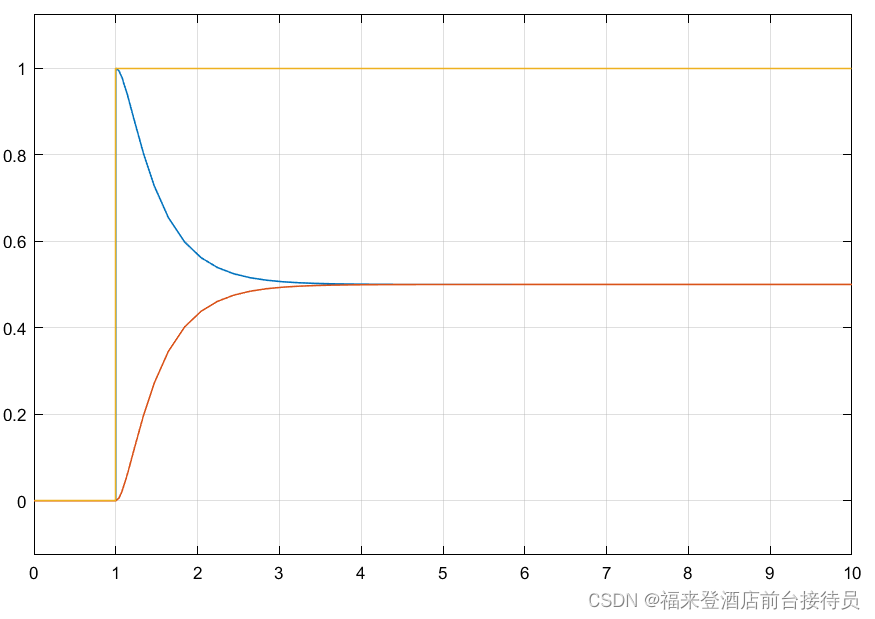

输入为Ramp时的曲线图:
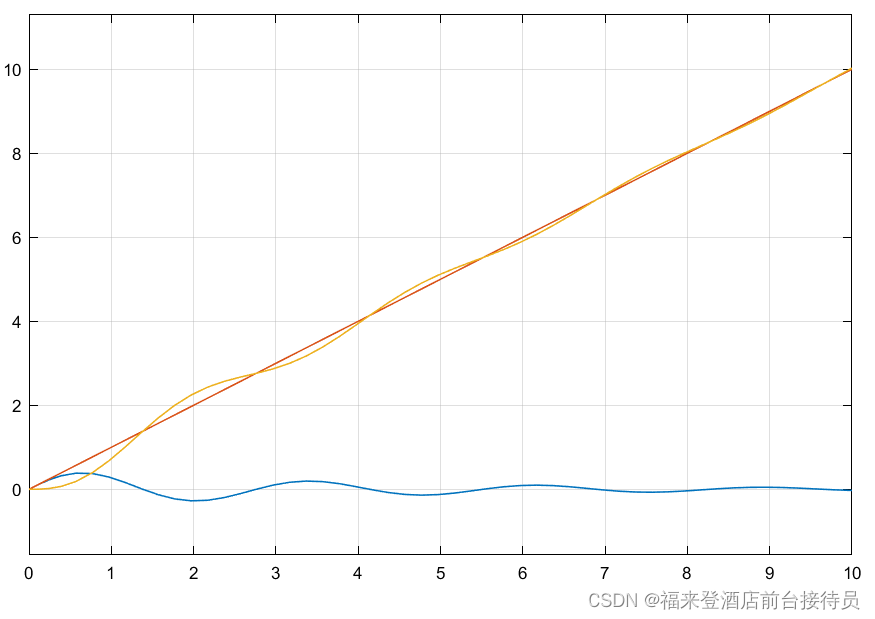
结论:
振荡系统,但最终会趋于稳定
表5-1 输入信号作用下的稳态误差
| 系统 | 阶跃输入r(t)=R.1(t) | 斜坡输入r(t)=Rt |
| 类别 | 位置误差e=R/(1+K) | 速度误差e=R/K |
| 0 | R/1+k | 无穷 |
| I | 0 | R/K |
| II | 0 | 0 |
关注作者了解更多
我的其他CSDN专栏
关注作者了解更多
资料来源于网络,如有侵权请联系编者


















 535
535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











