







目录
实验6 基于Matlab控制系统的根轨迹及其性能分析
一、实验目的:
1、通过学习本实验内容,学生能够掌握使用 MATLAB绘制控制系统零极点图和根轨迹图的方法;
2、学会分析控制系统根轨迹的一般规律;
3、能够利用根轨迹图进行系统性能的分析;
4、研究闭环零极点对系统性能的影响。
二、实验步骤:
1、绘制系统的零极点图
(1)已知系统的开环传递函数G(s)H(s)=(s^2+5s+5)/s(s+1)(s^2+2s+2)绘制系统的零极点图,读取数据填入表6-1中,总结规律。
matlab代码:
num=[1 5 5];den=[1 ,3 ,4, 2 ,0];sys=tf(num,den);figure;pzmap(sys)
根轨迹曲线
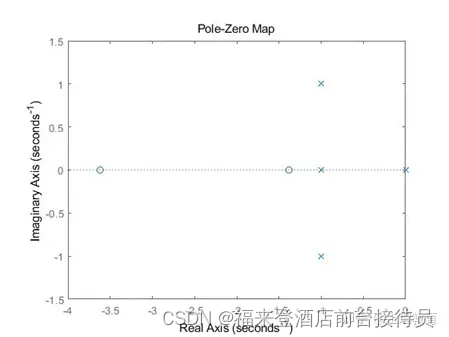
表6-1 系统零极点图
| 零极点 | 阻尼比ζ | 超调量Mp | 振荡频率wn |
| 零点1=-1.38 | 1 | 0 | 1.38 |
| 零点2=-3.62 | 1 | 0 | 3.62 |
| 极点1=-1 | 1 | 0 | 1 |
| 极点2=0 | -1 | 0 | 0 |
| 极点3=-1+i | 0.707 | 4.32 | 1.41 |
| 极点4=-1-i | 0.707 | 4.32 | 1.41 |
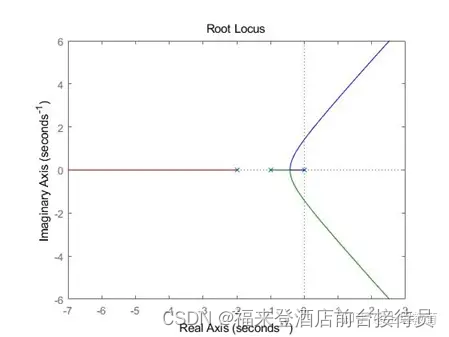
(2)若已知系统开环传递函数G(s)H(s)= k/s(s+1)(s+2),绘制控制系统的根轨迹图,并完成填空:
matlab代码:
clear all; close all;num=[1];den=[1 3 2 0];sys=tf(num,den);rlocus(sys)
根轨迹曲线:
填空
(1) 根轨迹有__ 3__条。
(2) 位于负实轴上的根轨迹(-∞,2)和(1,0)区段,其对应的阻尼ζ_____ 1_____,超调量为__ 0____,系统处于_ 临界阻尼 __状态,而且在远离虚轴的方向,随着增益K增大,振荡频率ω__ 增加___,系统动态相应衰减速率___增加 _____。
(3) 在根轨迹的分离点为___-0.423 ____,对应于阻尼ζ___1 ____,超调量为_0_ __,开环增益K=__ __,系统处于____ 临界阻尼_____状态。
(4) 根轨迹经过分离点后离开实轴,朝5右半平面运动。当根轨迹在分离点与虚轴这个区间时,闭环极点由___ -0.423____变为____0 ____,对应阻尼0<ζ<1,系统处于__ _欠阻尼___状态,其动态响应将出现__减幅_ ___振荡,而且越靠近虚轴,增益K越大,阻尼越小,超调量_ 增加 _,振荡频率ω__增加 __。
(5) 当根轨迹与虚轴相交时,闭环根位于虚轴上,闭环极点是一对纯虚根__+1.41i,-1.41i_ ____,阻尼___0 ___,超调量达到__100% ____,系统处于___ 临界阻尼___状态,其动态响应将出现__ 等幅____振荡。此时称为临界稳定增益K2=_ __6___。
3、根据控制系统的根轨迹,分析控制系统的性能。
已知一负反馈系统的开环传递函数为G(s)H(s)= k(s+3)/s(s+2)
(1) 绘制其根轨迹图,确定根轨迹的分离点与相应的增益。
使用代码:
clear all; close all;num=[1 3];den=[1 2 0];sys=tf(num,den);rlocus(sys)
得到根轨迹图:
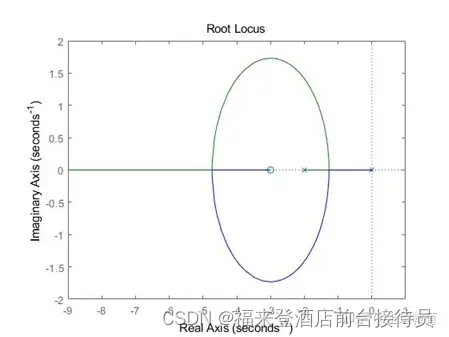
(2) 确定系统呈现欠阻尼状态时的开环增益范围。
0.536<k<7.46
(3) 确定系统最小阻尼比时的闭环极点。
Z=0时的阻尼比最小
加深了我对系统根轨迹图绘制法则的了解,了解系统阻尼比等概念。
实验 7 系统频率特性及稳定性分析
一、实验目的:
1、通过学习本实验内容,学生能够掌握频率特性的测量方法;
2、能够分析控制系统 Nyquist 图的基本规律;
3、掌握使用 MATLAB 绘制控制系统 Bode 图和分析稳定性的方法
二、实验步骤:
1、绘制控制系统 Nyquist 图
已知 G(s)H(s)=0.5/(s^3+2s^2+s+0.5), 计算系统特征根,并绘制 Nyquist 图,判定系统的稳定
性.
matlab使用代码:
num=[0.5];den=[1 2 1 0.5];
G=tf(num,den);pole(G)
nyquist(G)
得到结果及奈氏图如下:
ans =
-1.5652 + 0.0000i
-0.2174 + 0.5217i
-0.2174 - 0.5217i
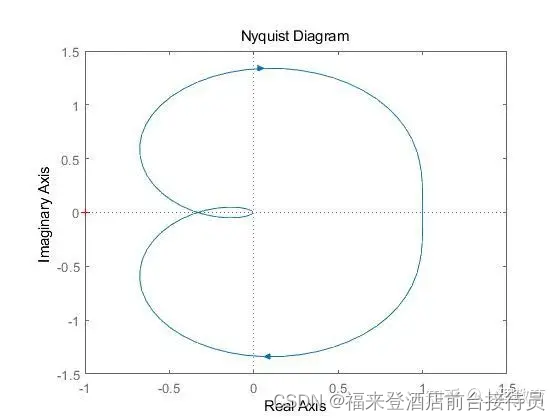
论:系统不具有正实部的根,且奈氏图越过(-1,0)的次数为 0,系统稳定。
2、根据 Nyquist 图分析系统稳定性
(1)已知系统开环传递函数为 G(S)=K(T1s+1)/s^2(T2s+1), 分别作出 T1>T2 和 T1<T2 时的 Nyqusit
图, 判定系统的稳定性,比较两图的区别与特点。(T1 和 T2 可以自拟参数)
解:T1>T2 时,
使用代码: num=[20 10];num=[1 1 0 0];G=tf(num,den);figure();nyquist(G);grid on
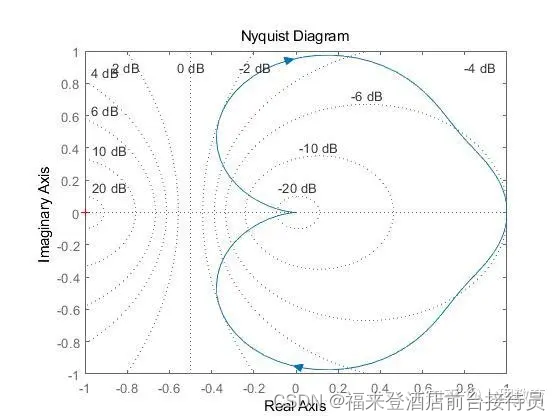
结论:系统逆时针包围临界点圈数等于开环正实部极点数,系统稳定
当T1<T2 时,
使用代码:
num=[1 1];num=[6 1 0 0];G=tf(num,den);figure();nyquist(G);grid on
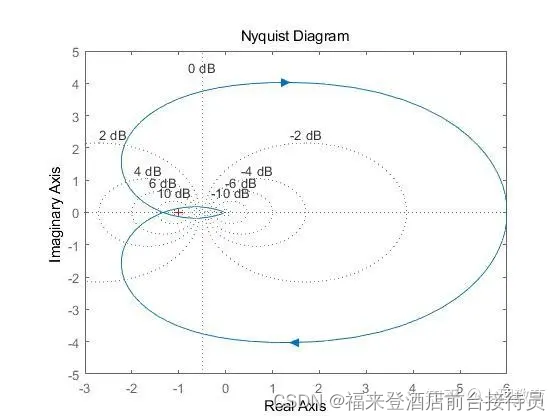
结论: 系统正穿越临界点的圈数不等于开环正实部极点数,系统不稳定
(2)已知系统开环传递函数为 G(S)H(s)=K/s^v(s+1)(s+2) (v 和 K 可以自拟参数)
令 v=1,
使用代码:
num=[1 ];num=[1 3 2 0];G=tf(num,den);figure();nyquist(G);grid on
结果截图为:
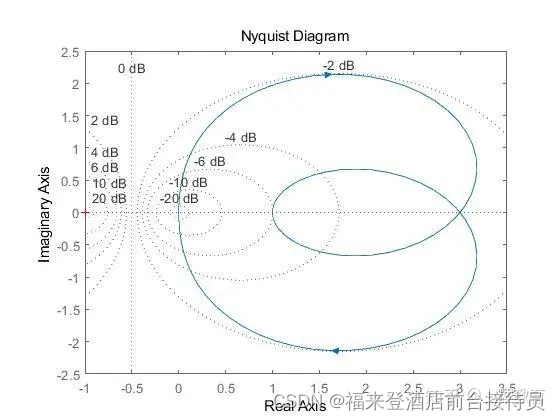
结论: 当 k 小于临界值时,系统稳定,当 k 大于临界值时,系统不稳定。
令 k=1,
使用代码:
num=[1 ];num=[1 3 2 0];G=tf(num,den);figure();nyquist(G);grid on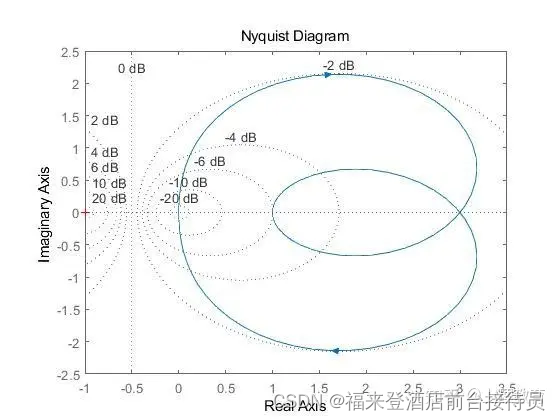
结论: 当 v=1 时,系统稳定,当 v 大于 1 时,系统不稳定。
3、绘制控制系统 Bode 图
(1)已知控制系统开环传递函数 G(s)H(s)=10/( s2+2s+10)绘制其 Bode 图,判定系统的稳定性。
使用代码:
num=[10 ];num=[1 2 10 ];G=tf(num,den);figure();bode(G);grid on
结果截图:
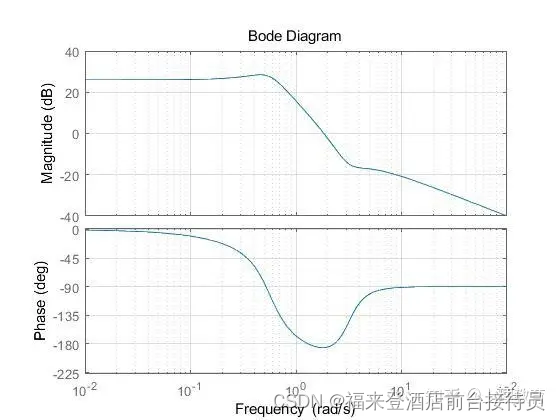
结论: 裕度为正,系统稳定
(2)已知单位负反馈系统的开环传递函数为 G(s)=2/s(s+1)(s+2)绘制其 Bode 图,求系统的稳定裕
度。
使用代码:
num=[2 ];num=[1 3 2 0 ];G=tf(num,den);figure();bode(G);grid on
结果截图:
结论:裕度为正,系统稳定
4、根据 Bode 分析系统稳定性
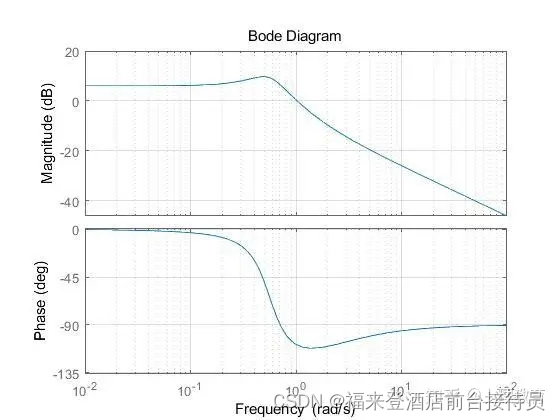
(1)系统开环传递函数 G(s)= K/s(0.5s+1)(.1s+1),尝试 k 取不同的值时,分析系统的稳定性,找
出系统的临界稳定时的增益 K。
使用代码: num=[1 ];num=[0.5 1.5 1 ];G=tf(num,den);figure();bode(G);grid on
结果截图:
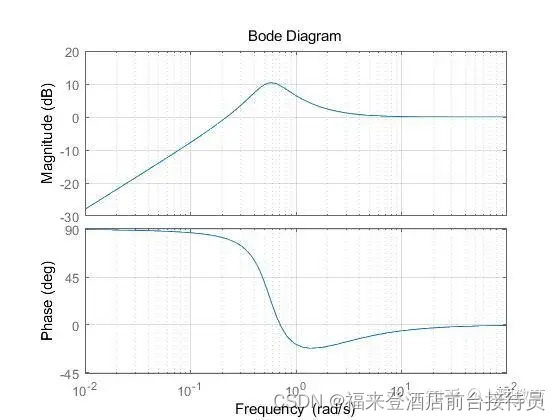
(2)已知系统开环传递函数 G(s)= k(s+1)/ s^2(0.1s+1),令 K=1 作 Bode 图,应用频域稳定判据确
定系统的稳定性,并确定使系统获得最大相位裕度 y 的增益 K 值。
使用代码:
num=[1 1];num=[0.1 1 0 0 ];G=tf(num,den);figure();bode(G);grid on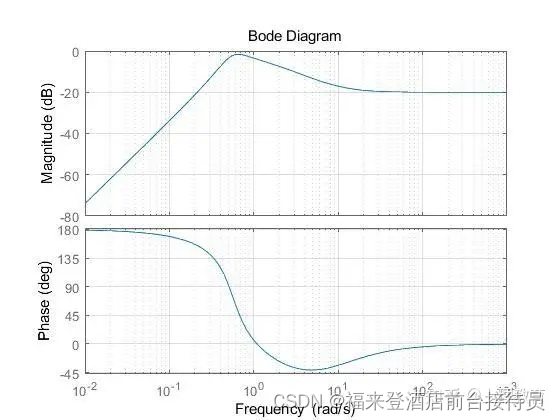
让我学会正确运用奈氏图和 BODE 图判定系统稳定性
实验8 系统频率特性及稳定性分析
一、实验目的:
1、通过学习本实验内容,学生能够掌校正设计方法;
2、巩固掌握使用 MATLAB 绘制控制系统 Bode图和分析稳定性的方法。
二、实验步骤:
1、校正设计案例一
已知系统开环传递函数G()=1/s^2(s+10)
试用根轨迹编辑器对系统进行补偿设计,使系统单位阶跃给定响应一次超调后就衰减;并在根轨迹编辑器中观察根轨迹图,以及系统阶跃响应曲线
步骤:
(1)调用rltool {()函数,打开带系统的根轨迹编辑器;
(1) 输入代码:
>> num=[1];den=[1 10 0 0 ];G=tf(num,den);rltool(G)
结果截图: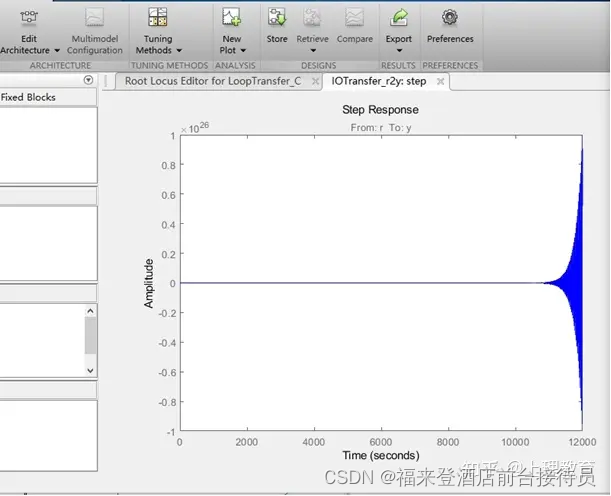
结论:发散
(2)确定控制系统的结构,选择其中的控制器模块(s)进行参数配置;
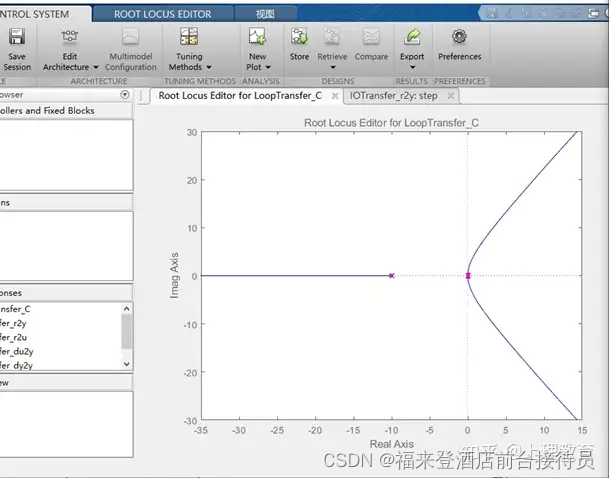
(2) 选中模块C进行参数配置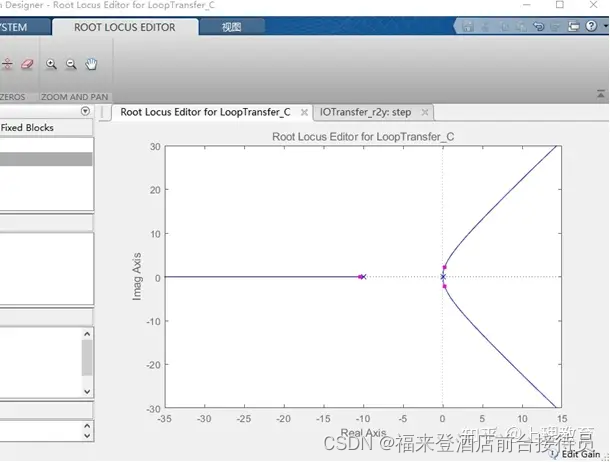
改变增益,扔发散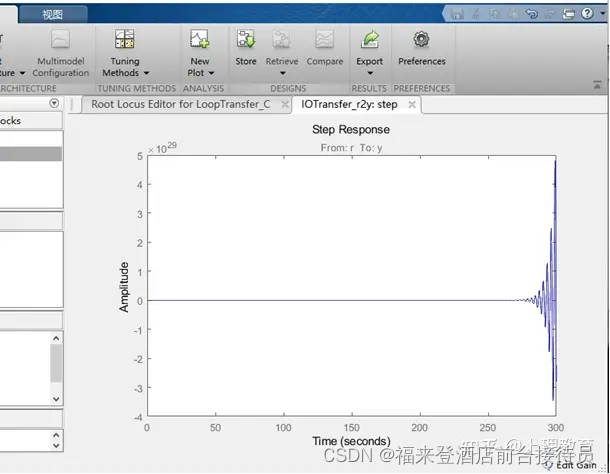
结论:有变化,在无穷处仍发散震荡
(3)在补偿器编辑窗口可动态调整增益大小附加零点或极点关键步骤
(3) 添加一个零点z=-10,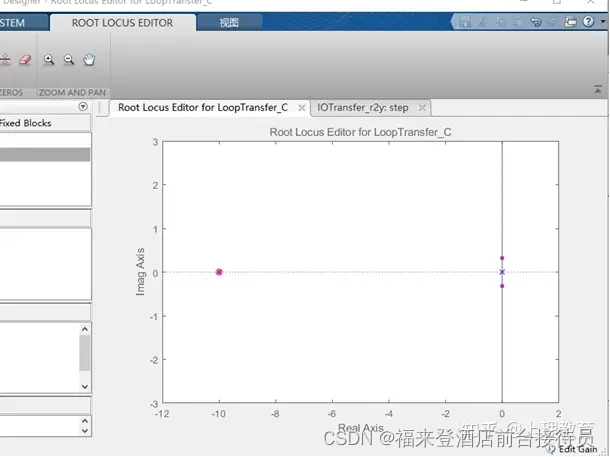
结论:添加零点,发散震荡,在无穷处衰减
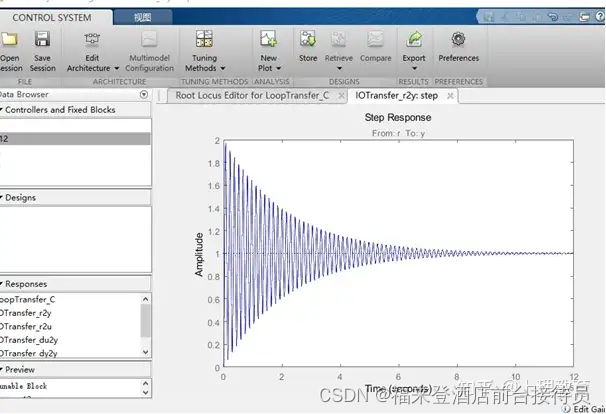
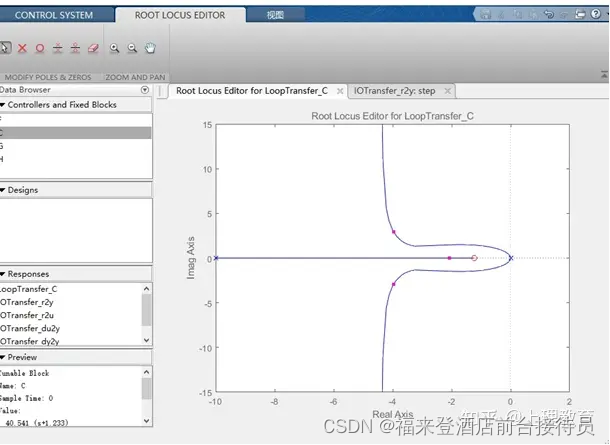
(4)在根轨迹编辑器窗口中系统观察根轨迹
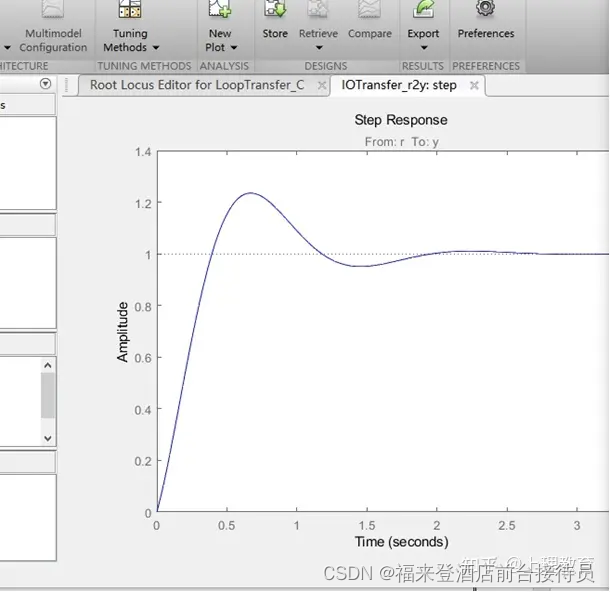
(5)在根轨迹编辑器窗口中系统观察阶跃响应曲线,读取动态性能指标;
(6)重复进行步骤(3)~(5),可以设计出符合题意要求的系统。多次尝试,可以掌握补偿增益和附加实数(或复数)零极点之间匹配的规律。
由此减小零点的绝对值大小z=-1,并将增益增大(K=30);
截图: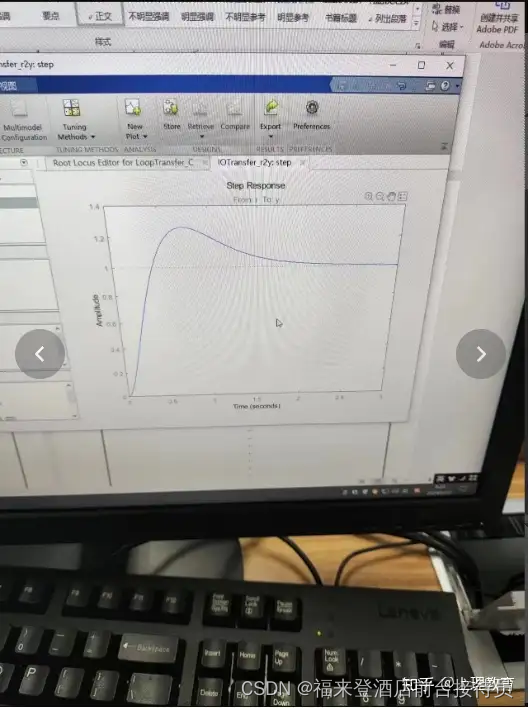
函数阶跃超调一次后就衰减
结论
通过添加零点z=-1,改变增益,可以进行系统校正,设计出符合题意的系统。
2、校正设计案例二
已知系统开环传递函数G(s)=10/(0.5s^2+s)
要求用根轨迹法设计超前校正装置Gc,要K>20,希望该单位负反馈系统的时域性能指标M<15%,1.5
输入代码:num=[10];den=[0.5 1 0 ];G=tf(num,den);rltool(G)
得到结果截图: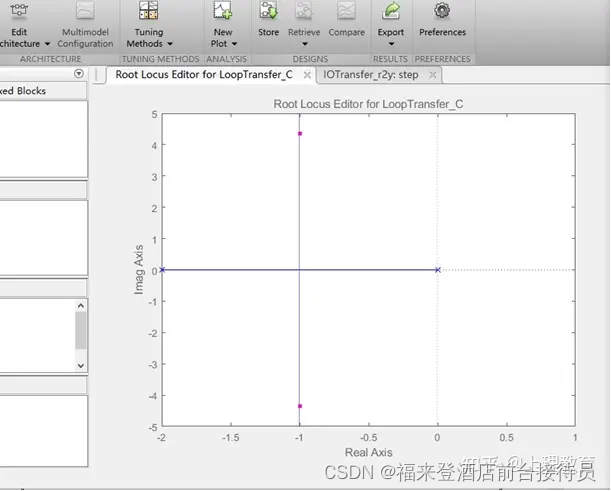
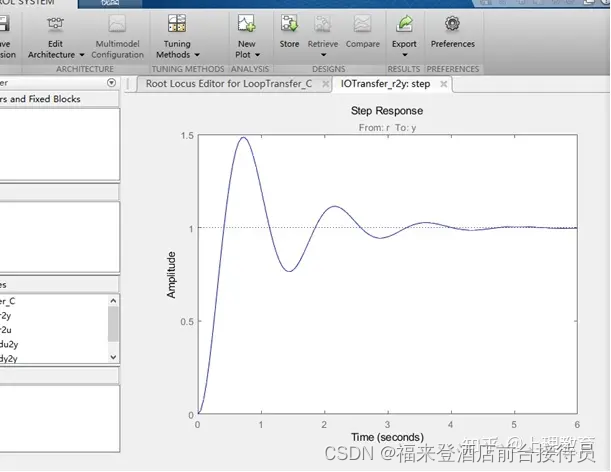 我们可以看到系统已经可以达到稳定状态,但是超调量48.5不满足题设要求,于是配置参数K=21,并新增一个零点z=-1;此时系统为过阻尼状态。
我们可以看到系统已经可以达到稳定状态,但是超调量48.5不满足题设要求,于是配置参数K=21,并新增一个零点z=-1;此时系统为过阻尼状态。
截图: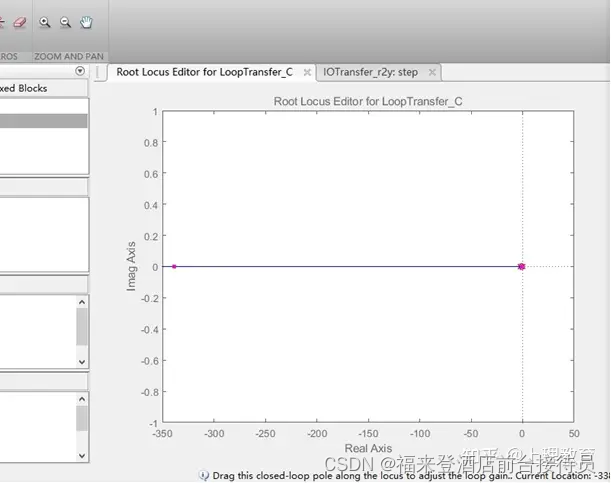
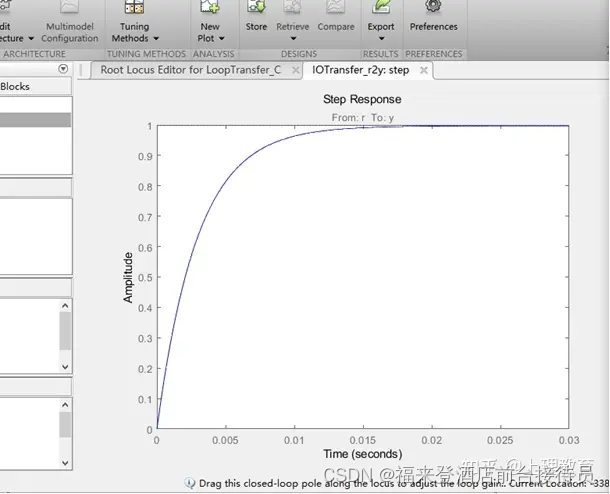
我们 因此将z值缩小10倍,即z=-10,得到结果: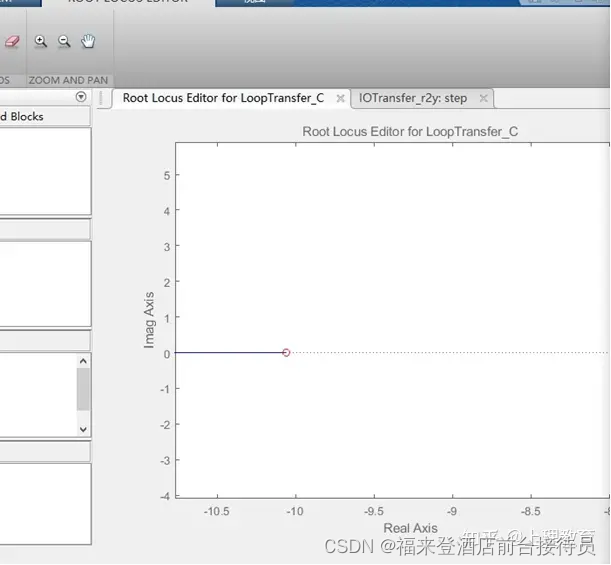
增加零点和改变系数可以调节系统阻尼,调节系统稳定性
让我知道了增益系数k和添加零点对系统稳定性的影响
资料仅供学习使用
编者能力有限,如有错误欢迎留言交流
编者的其他专栏:
关注编者了解更多


















 7652
7652

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











