







环境:vs2019+OpenCV4.5.1
1,灰度变换的基本概念
灰度变换指对图像的单个像素进行操作,主要以对比度和阈值处理为目的。其变换形式如下:
s=T®
其中,T是灰度变换函数;r是变换前的灰度;s是变换后的像素。
图像灰度变换的有以下作用:
- 改善图像的质量,使图像能够显示更多的细节,提高图像的对比度(对比度拉伸)
- 有选择的突出图像感兴趣的特征或者抑制图像中不需要的特征
- 可以有效的改变图像的直方图分布,使像素的分布更为均匀
2,常用的灰度变换说明
灰度变换函数描述了输入灰度值和输出灰度值之间变换关系,一旦灰度变换函数确定下来了,那么其输出的灰度值也就确定了。可见灰度变换函数的性质就决定了灰度变换所能达到的效果。用于图像灰度变换的函数主要有以下几种:
- 线性函数 (图像反转)
- 对数函数:对数和反对数变换
- Gamma变换:n次幂和n次开方变换
- 分段线性变换
3,线性变换
示例代码
#include <iostream>
#include <opencv2\core\core.hpp>
#include <opencv2\highgui\highgui.hpp>
using namespace std;
using namespace cv;
/*
在图像处理基础运算曾经说过,通过做线性变换改变单个像素点的值可以调节整幅图像的亮度和对比度,
即对像素进行线性变换,令r为变换前的灰度,s为变换后的灰度,则线性变换的函数:S=ar+b
其中,a为直线的斜率,b为在y轴的截距。选择不同的a,b值会有不同的效果:
a>1,增加图像的对比度
a<1,减小图像的对比度
a=0,b!=0,图像变亮或变暗
a<0且b=0,图像的亮区域变暗,暗区域变亮
a=-1,b=255,图像亮度反转
图像对比度指的是一幅图像中明暗区域最亮的白和最暗的黑之间不同亮度层级的测量,
即指一幅图像灰度反差的大小。差异范围越大代表对比越大,差异范围越小代表对比越小,
好的对比率120:1就可容易地显示生动、丰富的色彩,当对比率高达300:1时,便可支持各阶的颜色。
*/
int main()
{
Mat srcImg = imread("d:\\images\\im.jpg", 0);
/*注释
上面的Mat我们可以理解为一个存储数据的容器,定义了一个img对象来存图片的数据。
imread参数1:引号里面的为图片路径,直接在电脑路径复制。这里注意复制出来后是右斜杠"\",我们程序要左斜杠。
imread参数2:如果写为1最后输出就显示原图,如果写为0,最后输出就显示灰度图。
*/
if (!srcImg.data)
{
cout << "读入图片失败" << endl;
return -1;
}
double k, b;
cout << "请输入k和b值:";
cin >> k >> b;
int RowsNum = srcImg.rows;
int ColsNum = srcImg.cols;
Mat dstImg(srcImg.size(), srcImg.type());
//进行遍历图像像素,对每个像素进行相应的线性变换
for (int i = 0; i < srcImg.rows; i++)
{
uchar* srcData = srcImg.ptr<uchar>(i);
for (int j = 0; j < srcImg.cols; j++)
{
/*
* 函数 at(int y,int x)可以用来访问图像的元素,使用时必须指定数据类型,如
image.at<uchar>(j,i),对于彩色图像,每个像素由红、绿、蓝三通道构成,因此返
回的是一个向量,向量的每一元素为一个 unsigned char 变量,如
image.at<cv::Vec3b>(j,i)[chnnel]=value;
*/
dstImg.at<uchar>(i, j) = srcData[j] * k + b;
}
}
imshow("原图", srcImg);
imshow("线性变换后的图像", dstImg);
waitKey();
return 0;
}

4,分段线性变换
分段线性变换也是一种重要的灰度级变换。对于曝光不足,曝光过度和传感器动态范围都会造成图像表现出低对比度的特征。分段线性变换的作用是提高图像灰度级的动态范围。通常来说,通过阶段一定比例的最亮像素和最暗像素,并使得中间亮度像素占有整个灰度级,因而能够提高图像的全局对比度。在这种情况下,通常称之为对比度拉伸,直方图裁剪,目前广泛的应用于图像后期处理中。通常使用分段函数来实现。
4.1对比度拉伸技术
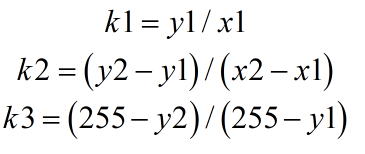
图像的对比度拉伸是通过扩展图像灰度级动态范围来实现的,它可以扩展对应的全部灰度范围。图像的低对比度一般是由于图像图像成像亮度不够、成像元器件参数限制或设置不当造成的。提高图像的对比度可以增强图像各个区域的对比效果,对图像中感兴趣的区域进行增强,而对图像中不感兴趣的区域进行相应的抑制作用。对比度拉伸是图像增强中的重要的技术之一。这里设点(x1,y1)与(x2,y2)是分段线性函数中折点位置坐标。常见的三段式分段线性变换函数的公式如下:
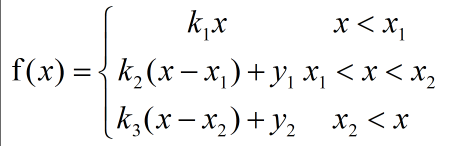
其中
其图像如下:
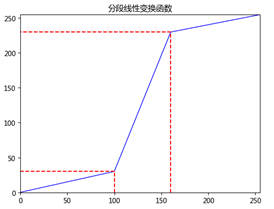
需要注意的是,分段线性一般要求是单调递增的,目的是防止图像中的灰度级不满足一 一映射。
分段的灰度拉伸技术可以结合直方图处理技术,从而更加灵活地控制输出图像的直方图分布,对特定感兴趣的区域进行对比度调整,增强图像画质。对于图像灰度集中在较暗的区域,可以采用斜率k>0来进行灰度拉伸扩展;对于图像中较亮的区域,可以采用修了k<0来进行灰度拉伸压缩。
代码展示:
#include <iostream>
#include <opencv2\core\core.hpp>
#include <opencv2\highgui\highgui.hpp>
#include <opencv2\imgproc\imgproc.hpp>
using namespace cv;
using namespace std;
int main()
{
Mat srcImage = imread("d:\\images\\im.jpg", 0);
if (!srcImage.data)
{
cout << "读入图片错误!" << endl;
return -1;
}
imshow("原始图片", srcImage);
Mat dstImage(srcImage);
int rowsNum = dstImage.rows;
int colsNum = dstImage.cols;
//图像连续性判断
if (dstImage.isContinuous())
{
colsNum = colsNum * rowsNum;
rowsNum = 1;//变成一行
}
//图像指针操作
uchar* pDataMat;
int pixMax = 0, pixMin = 255;
//计算图像像素的最大值和最小值
for (int j = 0; j < rowsNum; j++)
{
pDataMat = dstImage.ptr<uchar>(j);
for (int i = 0; i < colsNum; i++)
{
if (pDataMat[i] > pixMax)
pixMax = pDataMat[i];
if (pDataMat[i] < pixMin)
pixMin = pDataMat[i];
}
}
//进行对比度拉伸
for (int j = 0; j < rowsNum; j++)
{
pDataMat = dstImage.ptr<uchar>(j);
for (int i = 0; i < colsNum; i++)
{
pDataMat[i] = (pDataMat[i] - pixMin) * 250 / (pixMax - pixMin);
}
}
imshow("对比度拉伸后的图像", dstImage);
waitKey();
return 0;
//一些函数的解释
/*
cv::Mat::isContinuous()函数,返回bool值,判断存储是否连续。
这里连续的 意思是行与行之间的储存是否衔接。也就是说1*1和1*N的数据肯定是连续的,
而m*n的数据就是需要判断连续性的。如果数据存储是连续的,可以将图像看出一个一维数组。
否则只能用二维数据方式进行访问。
*/
/*
常用形式:
mat.ptr<type>(row)[col]
对于Mat的ptr函数,返回的是<>中的模板类型指针,指向的是()中的第row行的起点
通常<>中的类型和Mat的元素类型应该一致
然后再用该指针去访问对应col列位置的元素
单通道
cv::Mat image = cv::Mat(400, 600, CV_8UC1); //定义了一个Mat变量image。
uchar * data00 = image.ptr<uchar>(0); //data00是指向image第一行第一个元素的指针。
uchar * data10 = image.ptr<uchar>(1); //data10是指向image第二行第一个元素的指针。
uchar * data01 = image.ptr<uchar>(0)[1];//data01是指向image第一行第二个元素的指针。
多通道
cv::Mat image = cv::Mat(400, 600, CV_8UC3); //宽400,长600,3通道彩色图片
cv::Vec3b * data000 = image.ptr<cv::Vec3b>(0);
cv::Vec3b * data100 = image.ptr<cv::Vec3b>(1);
cv::Vec3b * data001 = image.ptr<cv::Vec3b>(0)[1];
cv::Vec3b * data
*/
}

5,对数变换
对数变换的通用公式是:s=log(1+r)/b
其中,b是一个常数,用来控制曲线的弯曲程度,其中,b越小越靠近y轴,b越大越靠近x轴。表达式中的r是原始图像中的像素值,s是变换后的像素值,可以分析出,当函数自变量较低时,曲线的斜率很大,而自变量较高时,曲线的斜率变得很小。 正是因为对数变换具有这种压缩数据的性质,使得它能够实现图像灰度拓展和压缩的功能。即对数变换可以拓展低灰度值而压缩高灰度级值,让图像的灰度分布更加符合人眼的视觉特征。
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace cv;
// 对数变换方法1
cv::Mat logTransform1(cv::Mat srcImage, int c)
{
// 输入图像判断
if (srcImage.empty())
std::cout << "No data!" << std::endl;
cv::Mat resultImage =
cv::Mat::zeros(srcImage.size(), srcImage.type());
// 计算 1 + r
cv::add(srcImage, cv::Scalar(1.0), srcImage);
// 转换为32位浮点数
srcImage.convertTo(srcImage, CV_32F);
// 计算 log(1 + r)
log(srcImage, resultImage);
resultImage = c * resultImage;
// 归一化处理
cv::normalize(resultImage, resultImage,
0, 255, cv::NORM_MINMAX);
cv::convertScaleAbs(resultImage, resultImage);
return resultImage;
}
// 对数变换方法2
cv::Mat logTransform2(Mat srcImage, float c)
{
// 输入图像判断
if (srcImage.empty())
std::cout << "No data!" << std::endl;
cv::Mat resultImage =
cv::Mat::zeros(srcImage.size(), srcImage.type());
double gray = 0;
// 图像遍历分别计算每个像素点的对数变换
for (int i = 0; i < srcImage.rows; i++) {
for (int j = 0; j < srcImage.cols; j++) {
gray = (double)srcImage.at<uchar>(i, j);
gray = c * log((double)(1 + gray));
resultImage.at<uchar>(i, j) = saturate_cast<uchar>(gray);
}
}
// 归一化处理
cv::normalize(resultImage, resultImage,
0, 255, cv::NORM_MINMAX);
cv::convertScaleAbs(resultImage, resultImage);
return resultImage;
}
// 对数变换方法3
cv::Mat logTransform3(Mat srcImage, float c)
{
// 输入图像判断
if (srcImage.empty())
std::cout << "No data!" << std::endl;
cv::Mat resultImage =
cv::Mat::zeros(srcImage.size(), srcImage.type());
srcImage.convertTo(resultImage, CV_32F);
resultImage = resultImage + 1;
cv::log(resultImage, resultImage);
resultImage = c * resultImage;
cv::normalize(resultImage, resultImage, 0, 255, cv::NORM_MINMAX);
cv::convertScaleAbs(resultImage, resultImage);
return resultImage;
}
int main()
{
// 读取灰度图像及验证
cv::Mat srcImage = cv::imread("d:\\images\\im.jpg", 0);
if (!srcImage.data)
return -1;
// 验证三种不同方式的对数变换速度
cv::imshow("srcImage", srcImage);
float c = 2;
cv::Mat resultImage;
double tTime;
//用来计算某个操作所使用的时间
tTime = (double)getTickCount();
const int nTimes = 10;
for (int i = 0; i < nTimes; i++)
{
resultImage = logTransform3(srcImage, c);
}
tTime = 1000 * ((double)getTickCount() - tTime) /
getTickFrequency();
tTime /= nTimes;
std::cout << "第三种方法耗时:" << tTime << std::endl;
cv::imshow("resultImage", resultImage);
cv::waitKey(0);
return 0;
/*
cv::add()
voidcvAdd( const CvArr* src1, const CvArr* src2, CvArr* dst, const CvArr* mask=NULL );
src1
第一个原数组
src2
第二个原数组
dst
输出数组
mask
操作的复盖面, 8-bit单通道数组; 只有复盖面指定的输出数组被修改。
函数 cvAdd 加一个数组到别一个数组中:
dst(I)=src1(I)+src2(I) if mask(I)!=0
除复盖面外所有的数组必须有相同的类型相同的大小(或ROI尺寸)
cv::Scalar
1 怎样使用cv::Scalar来设置opencv中的颜色
cv::Scalar的构造函数是cv::Scalar(v1, v2, v3, v4),前面的三个参数是依次设置BGR的,和RGB相反,第四个参数设置图片的透明度。
2 使用cv::Scalar的规则
当使用opencv提供的库函数imread()、imwrite()和imshow()时,
cv::Scalar(v1, v2, v3, v4)的这四个参数就依次是BGRA,即蓝、绿、红和透明度。
可以发现最后一个矩阵是4通道的,但是我们在初始化的时候只给出了一个通道的值,所以后面三个通道的值都默认为0。
归一化函数normalize
函数原型:void normalize(InputArray src,
OutputArraydst,
double alpha = 1,
double beta = 0,
intnorm_type = NORM_L2,
int dtype = -1,
InputArray mask = noArray() )
该函数归一化输入数组使它的范数或者数值范围在一定的范围内。
Parameters:
src 输入数组
dst 输出数组,支持原地运算
alpha range normalization模式的最小值
beta range normalization模式的最大值,不用于norm normalization(范数归一化)模式。
normType 归一化的类型,可以有以下的取值:
NORM_MINMAX:数组的数值被平移或缩放到一个指定的范围,线性归一化,一般较常用。
dtype dtype为负数时,输出数组的type与输入数组的type相同;
否则,输出数组与输入数组只是通道数相同,而tpye=CV_MAT_DEPTH(dtype).
mask 操作掩膜,用于指示函数是否仅仅对指定的元素进行操作。
cv::convertScaleAbs()用于实现对整个图像数组中的每一个元素,进行如下操作(一个函数)
该操作可实现图像增强等相关操作的快速运算,具体用法如下:
void cv::convertScaleAbs(
cv::InputArray src, // 输入数组
cv::OutputArray dst, // 输出数组
double alpha = 1.0, // 乘数因子
double beta = 0.0 // 偏移量
);
*/
}

6,伽马变换
基于幂次变换的Gamma校正是图像处理中一种非常重要的非线性变换,它与对数变换相反,它是对输入图像的灰度值进行指数变换,进而校正亮度上的偏差。通常Gamma校正长应用于拓展暗调的细节。伽马变换的公式为:s=cr^γ
其中c和 γ为正常数.,伽马变换的效果与对数变换有点类似,当 γ >1时将较窄范围的低灰度值映射为较宽范围的灰度值,同时将较宽范围的高灰度值映射为较窄范围的灰度值;当 γ <1时,情况相反,与反对数变换类似。其函数曲线如下:

当γ<1时,图像的高光部分被扩展而暗调备份被压缩,γ的值越小,对图像低灰度值的扩展越明显;当γ>1时,图像的高光部分被压缩而暗调部分被扩展,γ的值越大,对图像高灰度值部分的扩展越明显。这样就能够显示更多的图像的低灰度或者高灰度细节。
- 当γ<1时,低灰度区域动态范围扩大,进而图像对比度增强,高灰度值区域动态范围减小,图像对比度降低,图像整体灰度值增大,此时与图像的对数变换类似。
- γ>1时,低灰度区域的动态范围减小进而对比度降低,高灰度区域动态范围扩大,图像的对比度提升,图像的整体灰度值变小,Gamma校正主要应用在图像增强。
总之,r<1的幂函数的作用是提高图像暗区域中的对比度,而降低亮区域的对比度;r>1的幂函数的作用是提高图像中亮区域的对比度,降低图像中按区域的对比度。所以Gamma变换主要用于图像的校正,对于灰度级整体偏暗的图像,可以使用r<1的幂函数增大动态范围。对于灰度级整体偏亮的图像,可以使用r>1的幂函数增大灰度动态范围。
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/imgproc/types_c.h>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/highgui/highgui_c.h>
#include <iostream>
using namespace cv;
using namespace std;
void MyGammaCorrection(Mat& src, Mat& dst, float fGamma)
{
// build look up table
unsigned char lut[256];
for (int i = 0; i < 256; i++)
{
//防止颜色溢出操作
lut[i] = saturate_cast<uchar>(pow((float)(i / 255.0), fGamma) * 255.0f);
}
dst = src.clone();
const int channels = dst.channels();
switch (channels)
{
case 1: //灰度图的情况
{
MatIterator_<uchar> it, end;
for (it = dst.begin<uchar>(), end = dst.end<uchar>(); it != end; it++)
//*it = pow((float)(((*it))/255.0), fGamma) * 255.0;
*it = lut[(*it)];
break;
}
case 3: //彩色图的情况
{
MatIterator_<Vec3b> it, end;
for (it = dst.begin<Vec3b>(), end = dst.end<Vec3b>(); it != end; it++)
{
//(*it)[0] = pow((float)(((*it)[0])/255.0), fGamma) * 255.0;
//(*it)[1] = pow((float)(((*it)[1])/255.0), fGamma) * 255.0;
//(*it)[2] = pow((float)(((*it)[2])/255.0), fGamma) * 255.0;
(*it)[0] = lut[((*it)[0])];
(*it)[1] = lut[((*it)[1])];
(*it)[2] = lut[((*it)[2])];
}
break;
}
}
}
int main()
{
Mat image = imread("d:\\images\\im.jpg");
if (image.empty())
{
cout << "Error: Could not load image" << endl;
return 0;
}
Mat dst;
float fGamma = 1 / 2.2;
MyGammaCorrection(image, dst, fGamma);
imshow("Source Image", image);
imshow("Dst", dst);
waitKey();
return 0;
/*
saturate_cast<uchar>主要是为了防止颜色溢出操作
原理大致如下
if(data<0)
data=0;
elseif(data>255)
data=255;
pow()函数的原型为:
#include <math.h>
double pow( double base, double exp );计算x的y次幂。
返回值:x不能为负数且y为小数,或者x为0且y小于等于0,返回幂指数的结果。
返回类型:double型,int,float会给与警告!
MatConstIterator是opencv中只读数组的迭代器,用于存储序列。
*/
}
















 5349
5349











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









