







参考文献:
[1] Visual Odometry based on Stereo Image Sequences with RANSAC-based Outlier Rejection Scheme
[2] StereoScan: Dense 3d Reconstruction in Real-time
libviso2是AVG(Autonomous Vision Group)小组的开源项目。项目网址:http://www.cvlibs.net/software/libviso/
该项目实现了文献[1], [2]的视觉里程计和3D重建算法。本文主要分析视觉里程计(Visual Odometry, 以下简称VO)的部分,前半部分算法说明思路,后半部分给出了一些关键代码的注释。
更多关于VO的基础知识,请参考下面这篇文章。
传送门:视觉里程计综述
通常,VO算法分为如下几个步骤,
- 输入图像序列
- 特征点检测与匹配
- 运动估计
- 本地优化
文献[1], [2]设计了一种基于双目摄像机的算法,因此计算VO时需要四张图片——当前帧与前一帧的左,右图,而且这四张图已经做了立体校正。算法首先在这四张图的范围里寻找特征点并做匹配,再通过3D投影关系做运动估计,最后通过Kalman滤波做简单优化。libviso2实现了上述算法,对于单目相机,也给出了实现。以下内容主要解释了双目相机算法。
传送门:双目相机标定与校正
特征与匹配
如下图,libviso2采用了5*5的blob和corner掩码寻找特征点。
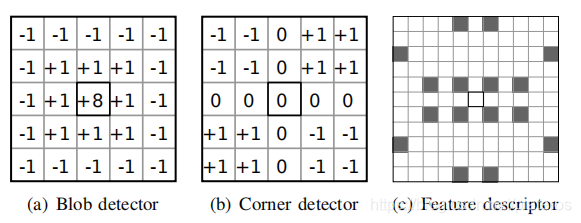
图(a)为Blob掩码。这是一个高斯拉普拉斯算子。图(b)是角点掩码。算法保留两种算子的局部最大和最小值作为特征点(blob max, blob min, corner max, corner min)。图(c)是特征点的特征描述符,保留了图示布局的梯度值(Sobel滤波)。
与SIFT,SURF相比, libviso2算法的特征与特征描述符看上去比较简单,并没有着重关注旋转/尺度不变性。这是因为作者认为相机自运动是平滑的刚体运动,不同图像之间特征的尺度,旋转变化不明显。更多关于特征值的内容,可移步我的专栏文章。
传送门: 特征与匹配专栏
特征匹配采用SAD算法。计算图(c)所示11*11窗口内特定位置的Sobel值的差的和。
匹配算法采用了"circle"策略,即首先选取当前帧左图图像的特征点, 去前一帧的左图图像搜索best match,再去前一帧右图搜索best match,之后去当前帧右图搜索best match,再回到当前帧左图搜索特征点。
如果最终找到的特征点,与初始特征点满足"一致"的条件,作为内点保留,然后进一步计算sub-pixel坐标。
运动估计
在做运动估计计算之前,首先采用Bucket策略进一步减少或者说均衡特征点。图像被均分为很多长方形区域。每个区域限制特征点个数的最大值。
Bucketing策略
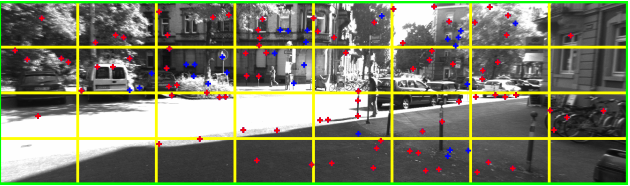
如上图,黄色实线为长方形的分割线。这样做会带来几个优点,
- 减少特征点提高效率。
- 均衡z轴(深度方向)的特征点分布,远近特征点均有机会被运动估计算法采用,从而提高了估计精度。
- 图像特征分布更均匀。考虑在动态场景中,大量的特征点可能位于独立的运动物体上。Bucketing之后,可以保证总有特征点不在这些运动的物体上,
除非满眼都是运动物体。
运动估计算法
考虑相机模型,
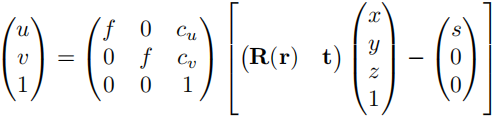
上面的公式已知相机坐标系的3D坐标(x, y, z)转成2D的图像坐标(u, v)
相机已经矫正过了,所以可以认为f= fx = fy,斜角参数为0。s 为基线。由于采用左侧相机为坐标原点,因此右侧相机需要减掉基线长度。求解最优RT,可以建模为最优化如下的代价函数。

公式(2),前半部分是左图的代价函数,后半部分为右图的代价函数。以前半部分为例,解释一下。 设分别为当前帧和前一帧左图上的匹配点。
的2维图像坐标为
,
是
(前一帧的特征点)在相机坐标系下的三维坐标(x, y, z),通过(r, t)和投影函数π,可以计算得到该坐标投影到当前帧上的图像坐标。该坐标与原先的坐标
的差异,构成了代价函数。需要优化一个最优的(r, t)使这个差异最小。作者采用了牛顿高斯法来解决这个问题。
局部优化
由于匹配算法本身存在的误差,运动物体的干扰,VO算法会采用RASAC算法去除外点。libviso2同样采用了此算法。
RANSAC算法
- 从所有匹配点中,随机挑选3组点对。
- 计算刚体运动变换和内点个数,保留内点。
- 重复N次
- 采用含最多内点的组重新估计运动。
之所以随机挑选3对,是因为刚体运动条件下,3对是最小需要的独立点对数。
最后,该算法采用经典Kalman滤波,使用匀加速模型进一步优化最终结果。
完整的程序框架,伪代码形式如下。
//伪代码
[imgL0, imgR0, imgL1, imgR1] = getIimages(); //输入图像序列
FeaturePoints = matching(imgL0, imgR0, imgL1, imgR1); //特征匹配
FeaturePoints = buckeingFeatures(FeaturePoints ); //Bucketing特征点
//ransac
for ransac_max //最大迭代次数
{
candiPoints= randomSelect(FeaturePoints ) //随机挑选3个点
[r, t] = minimize(candiPoints); //牛顿高斯迭代优化
[inliers, nums] = getInliers //计算内点个数,并保留内点
}
maxInliers = max_inlier(inliers, nums) //挑选内点最多的那一组
[r t] = minimize(maxInliers) //用这些内点重新计算R, Tlibviso2为保证实时性,并没有采用任何Pose-Graph或者BA优化处理,对积累误差的处理可能是不够的。采用卡尔曼滤波确实可以根据运动模型减少误差,但是对于积累误差的改善应该不大。另外,考虑一个极限情况,在某一帧,满屏都是运动物体(其实这种情况很常见)。此时,无论怎么优化,都很难得到正确的结果,因此还需要Keyframe的介入。因此libviso2算法的结果应该说是性能和效果的一个平衡。
代码
程序完整代码可以由项目网站下载。http://www.cvlibs.net/download.php?file=libviso2.zip
VO算法主体由下面process函数实现,
33 bool VisualOdometryStereo::process (uint8_t *I1,uint8_t *I2,int32_t* dims,bool replace) {
34
35 // push back images
36 matcher->pushBack(I1,I2,dims,replace);
37
38 // bootstrap motion estimate if invalid
39 if (!Tr_valid) {
40 matcher->matchFeatures(2);
41 matcher->bucketFeatures(param.bucket.max_features,param.bucket.bucket_width,param.bucket.buck et_height);
42 p_matched = matcher->getMatches();
43 updateMotion();
44 }
45
46 // match features and update motion
47 if (Tr_valid) matcher->matchFeatures(2,&Tr_delta);
48 else matcher->matchFeatures(2);
49 matcher->bucketFeatures(param.bucket.max_features,param.bucket.bucket_width,param.bucket.bucket _height);
50 p_matched = matcher->getMatches();
51 return updateMotion();
52 }
特征点计算computeFeatures在第36行 pushBack 中调用。
95 void Matcher::pushBack (uint8_t *I1,uint8_t* I2,int32_t* dims,const bool replace) {
96
97 // image dimensions
98 int32_t width = dims[0];
99 int32_t height = dims[1];
100 int32_t bpl = dims[2];
...
177 // compute new features for current frame
178 computeFeatures(I1c,dims_c,m1c1,n1c1,m1c2,n1c2,I1c_du,I1c_dv,I1c_du_full,I1c_dv_full);
179 if (I2!=0)
180 computeFeatures(I2c,dims_c,m2c1,n2c1,m2c2,n2c2,I2c_du,I2c_dv,I2c_du_full,I2c_dv_full);
181 }
computeFeatures函数对输入图像做sobel, blob, corner滤波。挑出blob(I_f1)和corner(I_f2)响应函数的极值,用其sobel值结果I_du, I_dv)计算特征描述符。
649 void Matcher::computeFeatures (uint8_t *I,const int32_t* dims,int32_t* &max1,int32_t &num1,int32 _t* &max2,int32_t &num2,uint8_t* &I_du,uint8_t* &I_dv,uint8_t* &I_du_full,uint8_t* &I_dv_full) {
650
651 int16_t *I_f1;
652 int16_t *I_f2;
653
654 int32_t dims_matching[3];
655 memcpy(dims_matching,dims,3*sizeof(int32_t));
656
657 // allocate memory for sobel images and filter images
658 if (!param.half_resolution) {
659 I_du = (uint8_t*)_mm_malloc(dims[2]*dims[1]*sizeof(uint8_t*),16);
660 I_dv = (uint8_t*)_mm_malloc(dims[2]*dims[1]*sizeof(uint8_t*),16);
661 I_f1 = (int16_t*)_mm_malloc(dims[2]*dims[1]*sizeof(int16_t),16);
662 I_f2 = (int16_t*)_mm_malloc(dims[2]*dims[1]*sizeof(int16_t),16);
663 filter::sobel5x5(I,I_du,I_dv,dims[2],dims[1]);
664 filter::blob5x5(I,I_f1,dims[2],dims[1]);
665 filter::checkerboard5x5(I,I_f2,dims[2],dims[1]);
666 } else {
...
680 }
681
682 // extract sparse maxima (1st pass) via non-maximum suppression
683 vector<Matcher::maximum> maxima1;
684 if (param.multi_stage) {
685 int32_t nms_n_sparse = param.nms_n*3;
686 if (nms_n_sparse>10)
687 nms_n_sparse = max(param.nms_n,10);
688 nonMaximumSuppression(I_f1,I_f2,dims_matching,maxima1,nms_n_sparse);
689 computeDescriptors(I_du,I_dv,dims_matching[2],maxima1);
690 }
691
692 // extract dense maxima (2nd pass) via non-maximum suppression
693 vector<Matcher::maximum> maxima2;
694 nonMaximumSuppression(I_f1,I_f2,dims_matching,maxima2,param.nms_n);
695 computeDescriptors(I_du,I_dv,dims_matching[2],maxima2);
matchFeatures实现了特征匹配。match函数实现了“circle"匹配策略。
183 void Matcher::matchFeatures(int32_t method, Matrix *Tr_delta) {
...
219 if (param.multi_stage) {
220
221 // 1st pass (sparse matches)
222 matching(m1p1,m2p1,m1c1,m2c1,n1p1,n2p1,n1c1,n2c1,p_matched_1,method,false,Tr_delta);
223 removeOutliers(p_matched_1,method);
224
225 // compute search range prior statistics (used for speeding up 2nd pass)
226 computePriorStatistics(p_matched_1,method);
227
228 // 2nd pass (dense matches)
229 matching(m1p2,m2p2,m1c2,m2c2,n1p2,n2p2,n1c2,n2c2,p_matched_2,method,true,Tr_delta);
230 if (param.refinement>0)
231 refinement(p_matched_2,method);
232 removeOutliers(p_matched_2,method);
233
234 // single pass matching
235 } else {
236 matching(m1p2,m2p2,m1c2,m2c2,n1p2,n2p2,n1c2,n2c2,p_matched_2,method,false,Tr_delta);
237 if (param.refinement>0)
238 refinement(p_matched_2,method);
239 removeOutliers(p_matched_2,method);
240 } matcher->bucketFeatures 实现了Bucketing均匀采样。注意,Bucket大小固定,但是并不是在原图上划分Bucket,而是在(0, 0) 到(vmax, umax)的区域里划分。vmax, umax分别为匹配点的最大行数,列数。为进一步保证随机性,函数在选择那些特征点保留时,采用了random_shuffle,随机取。
243 void Matcher::bucketFeatures(int32_t max_features,float bucket_width,float bucket_height) {
244
245 // find max values
246 float u_max = 0;
247 float v_max = 0;
248 for (vector<p_match>::iterator it = p_matched_2.begin(); it!=p_matched_2.end(); it++) {
249 if (it->u1c>u_max) u_max=it->u1c;
250 if (it->v1c>v_max) v_max=it->v1c;
251 }
252
253 // allocate number of buckets needed
254 int32_t bucket_cols = (int32_t)floor(u_max/bucket_width)+1;
255 int32_t bucket_rows = (int32_t)floor(v_max/bucket_height)+1;
256 vector<p_match> *buckets = new vector<p_match>[bucket_cols*bucket_rows];
257
258 // assign matches to their buckets
259 for (vector<p_match>::iterator it=p_matched_2.begin(); it!=p_matched_2.end(); it++) {
260 int32_t u = (int32_t)floor(it->u1c/bucket_width);
261 int32_t v = (int32_t)floor(it->v1c/bucket_height);
262 buckets[v*bucket_cols+u].push_back(*it);
263 }
264
265 // refill p_matched from buckets
266 p_matched_2.clear();
267 for (int32_t i=0; i<bucket_cols*bucket_rows; i++) {
268
269 // shuffle bucket indices randomly
270 std::random_shuffle(buckets[i].begin(),buckets[i].end());
271
272 // add up to max_features features from this bucket to p_matched
273 int32_t k=0;
274 for (vector<p_match>::iterator it=buckets[i].begin(); it!=buckets[i].end(); it++) {
275 p_matched_2.push_back(*it);
276 k++;
277 if (k>=max_features)
278 break;
279 }
280 }
updateMotion调用estimateMotion(p_matched),迭代计算R, T。 该函数有两个循环,第一个循环是RANSAC迭代次数的循环,
第二个循环(110行)是通过牛顿高斯法优化上文的代价函数,根据三个点求r ,t。getInlier函数获得此r, t的所有内点。RANSAC次数结束后,取最多内点的r, t。用其所有内点重新优化,求得最终的r, t。
54 vector<double> VisualOdometryStereo::estimateMotion (vector<Matcher::p_match> p_matched) {
....
81 // project matches of previous image into 3d
82 for (int32_t i=0; i<N; i++) {
83 double d = max(p_matched[i].u1p - p_matched[i].u2p,0.0001f);
84 X[i] = (p_matched[i].u1p-param.calib.cu)*param.base/d;
85 Y[i] = (p_matched[i].v1p-param.calib.cv)*param.base/d;
86 Z[i] = param.calib.f*param.base/d;
87 }
....
97 // initial RANSAC estimate
98 for (int32_t k=0;k<param.ransac_iters;k++) {
99
100 // draw random sample set
101 vector<int32_t> active = getRandomSample(N,3);
...
107 // minimize reprojection errors
108 VisualOdometryStereo::result result = UPDATED;
109 int32_t iter=0;
110 while (result==UPDATED) {
111 result = updateParameters(p_matched,active,tr_delta_curr,1,1e-6);
112 if (iter++ > 20 || result==CONVERGED)
113 break;
114 }
115
116 // overwrite best parameters if we have more inliers
117 if (result!=FAILED) {
118 vector<int32_t> inliers_curr = getInlier(p_matched,tr_delta_curr);
119 if (inliers_curr.size()>inliers.size()) {
120 inliers = inliers_curr;
121 tr_delta = tr_delta_curr;
122 }
123 }
124 }
125
126 // final optimization (refinement)
127 if (inliers.size()>=6) {
128 int32_t iter=0;
129 VisualOdometryStereo::result result = UPDATED;
130 while (result==UPDATED) {
131 result = updateParameters(p_matched,inliers,tr_delta,1,1e-8);
132 if (iter++ > 100 || result==CONVERGED)
133 break;
134 }
135
updateParameters函数实现了高斯牛顿法迭代优化。其中函数computeResidualAndJacobian计算高斯牛顿法所需的参差矩阵和雅克比矩阵。
179 VisualOdometryStereo::result VisualOdometryStereo::updateParameters(vector<Matcher::p_match> &p_matched,vector<int32_t> &active,vector<double> &tr,double step_size,double eps) {
180
181 // we need at least 3 observations
182 if (active.size()<3)
183 return FAILED;
184
185 // extract observations and compute predictions
186 computeObservations(p_matched,active);
187 computeResidualsAndJacobian(tr,active);
188
189 // init
190 Matrix A(6,6);
191 Matrix B(6,1);
192
193 // fill matrices A and B
194 for (int32_t m=0; m<6; m++) {
195 for (int32_t n=0; n<6; n++) {
196 double a = 0;
197 for (int32_t i=0; i<4*(int32_t)active.size(); i++) {
198 a += J[i*6+m]*J[i*6+n];
199 }
200 A.val[m][n] = a;
201 }
202 double b = 0;
203 for (int32_t i=0; i<4*(int32_t)active.size(); i++) {
204 b += J[i*6+m]*(p_residual[i]);
205 }
206 B.val[m][0] = b;
207 }

















 2055
2055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









