







禁止转载
自动驾驶的机非人障碍物识别方面已经有很多工作了,相关数据集、方法也非常完善。但是,关注道路普通障碍物的方法仍然很少。笔者将从多个角度,分多系列文章来描述目前效果较好的方法。希望各位看官关注我已获得长期更新。
资源
官网:https://www.6d-vision.com/current-research/lostandfounddataset
补充链接:https://wwwlehre.dhbw-stuttgart.de/~sgehrig/lostAndFoundDataset/
百度网盘:
工具包:https://github.com/mcordts/cityscapesScripts
工具包替换labels.py即可
介绍
本数据集于2016(IROS)年在《Peter Pinggera、Sebastian Ramos、Stefan Gehrig、Uwe Franke、Carsten Rother、Rudolf Mester》论文中提出,关注于检测道路上由丢失货物引起的意外小障碍物的问题。数据使用ZED被动双目采集,共有2104标注好的数据。数据提出后的几年有多个数据集效仿(如seg me if you can 、SOD),同时有40+的算法将此数据集作为benchmark。后续L&F被fishyscapes标准借鉴去做训练集,他们还额外扩展了私榜和web更新榜单。fishyscapes是目前道路异常检测任务中主流的benchmark。
同时,其中提出的算法使用的假设平面和竖直矩形分割方法在此任务的分割算法中较为常见。此方法将RGBD划分成竖条输入网络(更好的利用深度信息),被后续算法广泛采用。
数据集细节
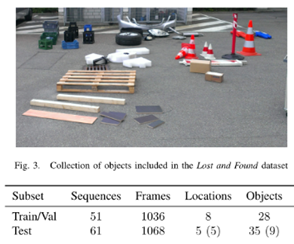
该数据集包含 112 个立体视频序列和 2104 个带注释的帧(从记录的数据中大约每十分之一帧挑选一次)。
数据集使用的障碍物道具如下图:
数据集详细标注

















 1920
1920











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









