







printf在程序调试中有很大帮助,实时打印log,非常方便。特别是在无线系统调试,实时性很强,并不是单步调试能够做到的。
TICC2530,实现printf步骤:
1.添加log.c文件
#include "OSAL.h"
#include "npi.h"
#include <stdarg.h>
#include <stdio.h>
#include "log.h"
#if (defined HAL_UART) && (HAL_UART == TRUE)
static void NpiSerialCallback( uint8 port, uint8 events );
void log_init(void)
{
// 串口初始化 波特率默认是115200, 形参是回调函数
NPI_InitTransport(NpiSerialCallback);
}
// 串口回调函数,
static void NpiSerialCallback( uint8 port, uint8 events )
{
(void)port;//加个 (void),是未了避免编译告警,明确告诉缓冲区不用理会这个变量
if (events & (HAL_UART_RX_TIMEOUT | HAL_UART_RX_FULL)) //串口有数据
{
uint8 numBytes = 0;
numBytes = NPI_RxBufLen(); //读出串口缓冲区有多少字节
if(numBytes == 0)
{
return;
}
else
{
//申请缓冲区buffer
uint8 *buffer = osal_mem_alloc(numBytes);
if(buffer)
{
//读取读取串口缓冲区数据,释放串口数据
NPI_ReadTransport(buffer,numBytes);
//把收到的数据发送到串口-实现回环
NPI_WriteTransport(buffer, numBytes);
//释放申请的缓冲区
osal_mem_free(buffer);
}
}
}
}
#define PRINT_BUF_LEN 20
int SerialPrintf(const char*fmt, ...)
{
uint32 ulLen;
va_list ap;
char *pBuf = (char*)osal_mem_alloc(PRINT_BUF_LEN); // 开辟缓冲区
va_start(ap, fmt);
ulLen = vsprintf(pBuf, fmt, ap); // 用虚拟打印函数实现
va_end(ap);
HalUARTWrite(HAL_UART_PORT_0, (uint8*)pBuf, ulLen); // 从串口 0 输出
osal_mem_free(pBuf); // 释放内存空间
return ulLen;
}
#else
int SerialPrintf(const char*fmt, ...)
{
return 0;
}
#endif // (defined HAL_UART) && (HAL_UART == TRUE)2.添加log.h文件
#ifndef LOG_H
#define LOG_H
#ifdef __cplusplus
extern "C"
{
#endif
void log_init(void);
int SerialPrintf(const char*fmt, ...);
#define log SerialPrintf
#ifdef __cplusplus
}
#endif
#endif /* LOG_H */3.添加程序配置宏
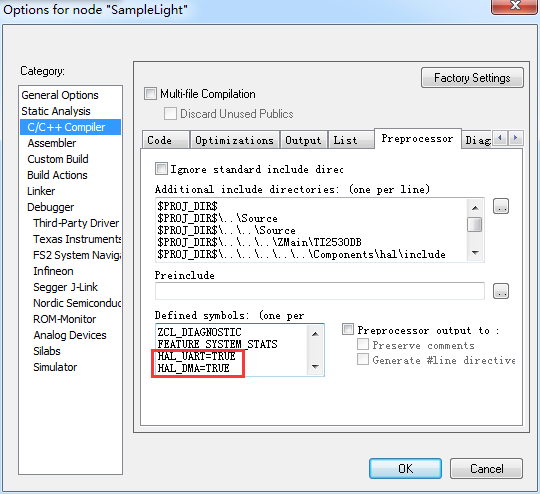
4. 添加程序初始化调用(本例在是在Z-Stack Home 1.2.2a.44539\Projects\zstack\HomeAutomation\SampleLight例程上演示的,所以函数添加在zclSampleLight_Init()中)
#if (defined HAL_UART) && (HAL_UART == TRUE)
log_init();
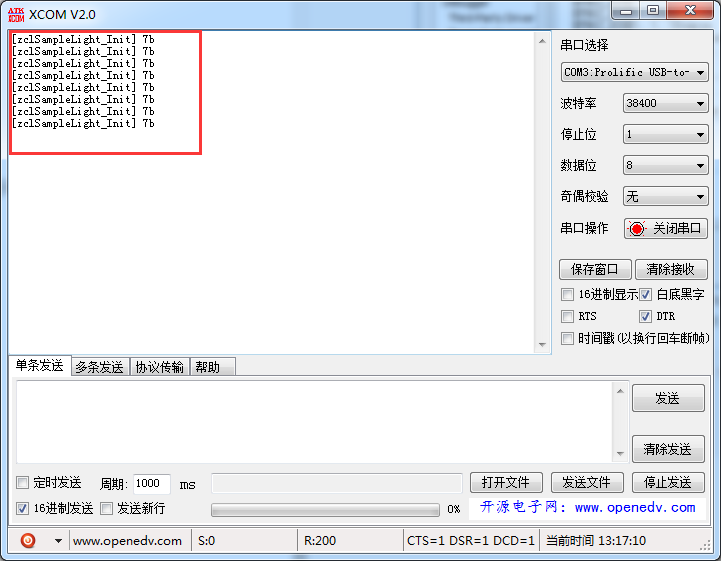
log("[%s] %x\n", __FUNCTION__, 123);
#endif5.查看输出结果
6.特别说明,由于Z-stack代码中没有添加npi.c和npi.h,所以此两个文件是在TI CC2540 BLE协议栈中copy的,具体代码如下:
7.npi.c:
/*******************************************************************************
* INCLUDES
*/
#include "hal_types.h"
#include "hal_board.h"
#include "npi.h"
/*******************************************************************************
* MACROS
*/
/*******************************************************************************
* CONSTANTS
*/
/*******************************************************************************
* TYPEDEFS
*/
/*******************************************************************************
* LOCAL VARIABLES
*/
/*******************************************************************************
* GLOBAL VARIABLES
*/
/*******************************************************************************
* PROTOTYPES
*/
/*******************************************************************************
* FUNCTIONS
*/
/*******************************************************************************
* @fn NPI_InitTransport
*
* @brief This routine initializes the transport layer and opens the port
* of the device. Note that based on project defines, either the
* UART, USB (CDC), or SPI driver can be used.
*
* input parameters
*
* @param npiCback - User callback function when data is available.
*
* output parameters
*
* @param None.
*
* @return None.
*/
void NPI_InitTransport( npiCBack_t npiCBack )
{
halUARTCfg_t uartConfig;
// configure UART
uartConfig.configured = TRUE;
uartConfig.baudRate = NPI_UART_BR;
uartConfig.flowControl = NPI_UART_FC;
uartConfig.flowControlThreshold = NPI_UART_FC_THRESHOLD;
uartConfig.rx.maxBufSize = NPI_UART_RX_BUF_SIZE;
uartConfig.tx.maxBufSize = NPI_UART_TX_BUF_SIZE;
uartConfig.idleTimeout = NPI_UART_IDLE_TIMEOUT;
uartConfig.intEnable = NPI_UART_INT_ENABLE;
uartConfig.callBackFunc = (halUARTCBack_t)npiCBack;
// start UART
// Note: Assumes no issue opening UART port.
(void)HalUARTOpen( NPI_UART_PORT, &uartConfig );
return;
}
/*******************************************************************************
* @fn NPI_ReadTransport
*
* @brief This routine reads data from the transport layer based on len,
* and places it into the buffer.
*
* input parameters
*
* @param buf - Pointer to buffer to place read data.
* @param len - Number of bytes to read.
*
* output parameters
*
* @param None.
*
* @return Returns the number of bytes read from transport.
*/
uint16 NPI_ReadTransport( uint8 *buf, uint16 len )
{
return( HalUARTRead( NPI_UART_PORT, buf, len ) );
}
/*******************************************************************************
* @fn NPI_WriteTransport
*
* @brief This routine writes data from the buffer to the transport layer.
*
* input parameters
*
* @param buf - Pointer to buffer to write data from.
* @param len - Number of bytes to write.
*
* output parameters
*
* @param None.
*
* @return Returns the number of bytes written to transport.
*/
uint16 NPI_WriteTransport( uint8 *buf, uint16 len )
{
return( HalUARTWrite( NPI_UART_PORT, buf, len ) );
}
/*******************************************************************************
* @fn NPI_RxBufLen
*
* @brief This routine returns the number of bytes in the receive buffer.
*
* input parameters
*
* @param None.
*
* output parameters
*
* @param None.
*
* @return Returns the number of bytes in the receive buffer.
*/
uint16 NPI_RxBufLen( void )
{
return( Hal_UART_RxBufLen( NPI_UART_PORT ) );
}
/*******************************************************************************
* @fn NPI_GetMaxRxBufSize
*
* @brief This routine returns the max size receive buffer.
*
* input parameters
*
* @param None.
*
* output parameters
*
* @param None.
*
* @return Returns the max size of the receive buffer.
*/
uint16 NPI_GetMaxRxBufSize( void )
{
return( NPI_UART_RX_BUF_SIZE );
}
/*******************************************************************************
* @fn NPI_GetMaxTxBufSize
*
* @brief This routine returns the max size transmit buffer.
*
* input parameters
*
* @param None.
*
* output parameters
*
* @param None.
*
* @return Returns the max size of the transmit buffer.
*/
uint16 NPI_GetMaxTxBufSize( void )
{
return( NPI_UART_TX_BUF_SIZE );
}
/*******************************************************************************
******************************************************************************/
8.npi.h
#ifndef NPI_H
#define NPI_H
#ifdef __cplusplus
extern "C"
{
#endif
/*******************************************************************************
* INCLUDES
*/
#include "hal_types.h"
#include "hal_board.h"
#include "hal_uart.h"
/*******************************************************************************
* MACROS
*/
/*******************************************************************************
* CONSTANTS
*/
/* UART port */
#if !defined NPI_UART_PORT
#if ((defined HAL_UART_SPI) && (HAL_UART_SPI != 0)) // FOR SPI
#if (HAL_UART_SPI == 2)
#define NPI_UART_PORT HAL_UART_PORT_1
#else
#define NPI_UART_PORT HAL_UART_PORT_0
#endif
#else // FOR UART
#if ((defined HAL_UART_DMA) && (HAL_UART_DMA == 1))
#define NPI_UART_PORT HAL_UART_PORT_0
#elif ((defined HAL_UART_DMA) && (HAL_UART_DMA == 2))
#define NPI_UART_PORT HAL_UART_PORT_1
#else
#define NPI_UART_PORT HAL_UART_PORT_0
#endif
#endif // Endif for HAL_UART_SPI/DMA
#endif //Endif for NPI_UART_PORT
#if !defined( NPI_UART_FC )
#define NPI_UART_FC FALSE//TRUE //change eric
#endif // !NPI_UART_FC
#define NPI_UART_FC_THRESHOLD 48
#define NPI_UART_RX_BUF_SIZE 128
#define NPI_UART_TX_BUF_SIZE 128
#define NPI_UART_IDLE_TIMEOUT 6
#define NPI_UART_INT_ENABLE TRUE
#if !defined( NPI_UART_BR )
#define NPI_UART_BR HAL_UART_BR_19200//HAL_UART_BR_115200
#endif // !NPI_UART_BR
/*******************************************************************************
* TYPEDEFS
*/
typedef void (*npiCBack_t) ( uint8 port, uint8 event );
/*******************************************************************************
* LOCAL VARIABLES
*/
/*******************************************************************************
* GLOBAL VARIABLES
*/
/*******************************************************************************
* FUNCTIONS
*/
//
// Network Processor Interface APIs
//
extern void NPI_InitTransport( npiCBack_t npiCBack );
extern uint16 NPI_ReadTransport( uint8 *buf, uint16 len );
extern uint16 NPI_WriteTransport( uint8 *, uint16 );
extern uint16 NPI_RxBufLen( void );
extern uint16 NPI_GetMaxRxBufSize( void );
extern uint16 NPI_GetMaxTxBufSize( void );
/*******************************************************************************
*/
#ifdef __cplusplus
}
#endif
#endif /* NPI_H */
9.将上面的npi文件添加到工程,就可以了。
———-以此记录,2016年8月22日















 1709
1709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









