









原文链接: https://mp.weixin.qq.com/s?__biz=Mzg4MjgxMjgyMg==&mid=2247486184&idx=1&sn=c3d6c19d03d519906fc606ec367af4f2&chksm=cf51b811f82631078407c3a8740932d42a1e0dd315416375721f49150c33dfa9d68f02bc7337#rd
论文阅读 IEEE TITS 2023 | 4D High-Resolution Imagery of Point Clouds for Automotive mmWave Radar
毫米波成像论文阅读笔记 | IEEE TITS, 2023 4D High-Resolution Imagery of Point Clouds for Automotive mmWave Radar
@article{jiang20234d,
title={4D High-Resolution Imagery of Point Clouds for Automotive mmWave Radar},
author={Jiang, Mengjie and Xu, Gang and Pei, Hao and Feng, Zeyun and Ma, Shuai and Zhang, Hui and Hong, Wei},
journal={IEEE Transactions on Intelligent Transportation Systems},
year={2023},
publisher={IEEE}
}
0 Abstract
-
4D mmwave radar面临的问题:
- too sparse: due to the limitation of Doppler and angle resolutions
-
本文贡献:
-
提出了一种高doppler and angle resolution的algorithm
-
1 高Doppler resolution with high-dynamic:
✅ propose a novel velocity ambiguity resolution algorithm
🚩 using a dual pulse repetition frequency (dual-PRF) waveform design + embedded in an time-division multiplexing & Doppler-division multiplexing MIMO (TDM-DMM-MIMO) framework
-
2 高Angular resolution:
✅ propose a complex-valued deep convolution network (CV-DCN) of DOA-SR estimation (with only one single frame)
🚩 apply a spatial smoothing operator on array data as input
🚩 CV-DCN: end-to-end spectrum extraction
-
-
实验结果:
- 1 confirm the effectiveness of the proposed algorithm
- 2 4D high resolution imagery of PCD by experiments in the parking lot
1 Introduction
4D mmwave radar 应用前景很广
1.1 Introduction of Related Work
MIMO + 多芯片级联 方案 面临的问题:
- 1 如何优化正交波形设计
- 2 高动态高分辨率速度测量
- 3 高分辨率DOA估计
⇒ \Rightarrow ⇒ 下面分别进行介绍
1.1.1 Orthogonal Waveform Design
- TDM 时分复用
- 优点:简单、正交性好
- 缺点:牺牲了MIMO transmission capability + PRI (Pulse repetition interval)
- CDM 码分复用
- 多个TX同时发射波形,但是需要使用不同的random codes进行调制
- 优点:MIMO传输容量 is efficiently exploited
- 缺点:high-level interferences are inevitable in the Doppler domain ( 因为不同coded waveforms之间的非理想正交性)
- DDM 多普勒分复用
- the transmitted waveforms are modulated by multiple sets of linear phase codes
- these codes are distinct for each transmitted waveform and switched between pulses
- 优点:completely separated in the Doppler domain with various Doppler offsets
- 缺点:难以identifying true targets from ghost targets in the Doppler domain, particularly in multi-target scenarios
1.1.2 Velocity Ambiguity Resolution
- 速度模糊:
- 当目标的多普勒频率超过脉冲重复频率(PRF)的一个周期时,就会出现多普勒模糊
- TDM-MIMO中的固有矛盾:
- 最大无歧义速度与发射器的数量成反比地减小
- 解决上述问题的方案:
- 具有不同PRF和中国剩余定理(CRT的框架 ([14])
- 一种基于不规则脉冲间隔和稀疏信号处理的类似算法 ([17])
- 基于相位编码方案,利用每个峰值的功率来分离传输信号,从而解决速度模糊问题 ([18,19]) ⇒ \Rightarrow ⇒ 但当目标在范围内重叠时,RD图像严重恶化
- 用基于 TDM 方案 [21] 的假设相位补偿,通过匹配最佳角度估计性能来确定速度 ⇒ \Rightarrow ⇒ 需要对每个假设速度进行额外的角度估计
- 本文:提出了基于TDM-DDM-MIMO框架的双PRF波形速度模糊度解算算法
- 易于实现
- 消除了与 DDM 编码相关的多目标检测问题
1.1.3 High-Resolution DOA Estimation
- 传统方法:基于物理阵列结构
- 受限于 孔径长度、阵列缺陷、信噪比等
- 深度学习方法
- 通过数据驱动学习提取高级上下文的能力,可以显着提高估计性能和泛化能力 [32]
- 分两类:分类策略 、 回归策略
- (a): 分类策略: 用于离散问题,难以表示目标相关性、空间谱连续性等关键信息
- (b): 回归策略: 用于连续问题,尚未充分利用幅度和相位特征,难以从空间谱中获取更详细的局部特征
- 本文:CV-DCN
- 利用了相位信息 + 幅度信息
- 参考自编码器网络
1.2 Our Contributions
propose a novel algorithm of HR PCD generation for automative 4D radar. Main contributions:
- 1 设计了 an integrated TDM-DDM-MIMO framework
- 更好的正交机制
- 2 基于TDM-DDM-MIMO,使用 dual-PRF waveform design 设计了速度去模糊算法
- 克服了传统TDM-MIMO中的发射单元和PRF之间的固有矛盾
- 3 提出了一种基于 CV-DCN 的DOA-SR算法
- 仅使用单帧数据
- 通过空间平滑算子对阵列数据 幅值 + 相位 进行预处理
- 通过端到端的频谱提取,实现了DOA估计
- 4 进行了 详细的实验
后续结构:
1 Sec 2: 推导了基本的MIMO信号模型,简要介绍了TDM-MIMO和DDM-MIMO方案,最后得到了4D坐标的完整表达
2 Sec 3: 提供了一种新颖的 TDM-DDM-MIMO 框架和基于 MIMO 的速度模糊解决算法 + CV-DCN算法,仅使用单帧数据即可实现高分辨率DOA估计
3 Sec 4:实施模拟和实际测量实验
4 Sec 5:总结
2 Signal Model of MIMO Radar
2.1 Basic Signal Model
-
MIMO FMCW中,第m个发射天线的发射信号:
- S T m ( t , t ˉ ) = G m ⋅ p m ( t ^ ) ⋅ rect ( t ˉ T p ) ⋅ exp ( j 2 π f c t ) ⋅ exp ( j π μ t ˉ 2 ) S_T^m(t, \bar{t})=G_m \cdot \mathbf{p}_{\mathbf{m}}(\hat{t}) \cdot \operatorname{rect}\left(\frac{\bar{t}}{T_p}\right) \cdot \exp \left(j 2 \pi f_c t\right) \cdot \exp \left(j \pi \mu \bar{t}^2\right) STm(t,tˉ)=Gm⋅pm(t^)⋅rect(Tptˉ)⋅exp(j2πfct)⋅exp(jπμtˉ2)
- t: continuous time
- t ˉ \bar{t} tˉ: fast time
- t ^ = t − t ˉ \hat{t} = t - \bar{t} t^=t−tˉ: slow time
- G m G_m Gm: the gain of the m-th TX antenna
- T p T_p Tp: the pulse width
- f c f_c fc: the carrier frequency
- μ \mu μ: the chirp rate of LFM signal
- p m ( t ^ ) \mathbf{p}_{\mathbf{m}}(\hat{t}) pm(t^): phase modulator related to the pre-defined m-th transmitter ⇒ \Rightarrow ⇒ ensure MIMO waveform orthogonality
-
目前,相位调制(phase modulation) is mostly applied
- due to the limitation of mmwave chirp
- For M transmitters, the phase modulation matrix: P = [ p 1 ; ⋯ ; p m ; ⋯ ; p M ] \mathbf{P}=\left[\mathbf{p}_{\mathbf{1}} ; \cdots ; \mathbf{p}_{\mathbf{m}} ; \cdots ; \mathbf{p}_{\mathbf{M}}\right] P=[p1;⋯;pm;⋯;pM]
-
假设有K个targets, 其中第k个target的速度为 v k v_k vk, 则瞬时距离 R k ( t ) R_k(t) Rk(t)可被expressed as:
- R k ( t ) ≈ R k ( t ^ ) = R k , 0 + v k t ^ R_k(t)\approx R_k(\hat{t}) =R_{k, 0}+v_{k} \hat{t} Rk(t)≈Rk(t^)=Rk,0+vkt^
- Note: assume the range of targets is constant within a single pusle time
- R k , 0 R_{k, 0} Rk,0: the initial range of the k-th target at the start of the pulse
- R k ( t ^ ) R_k(\hat{t}) Rk(t^): the range of the k-th target at moment t ^ \hat{t} t^
-
第m根发射天线发射的信号经反射,被第n根接收天线接收的信号为:
-
S R m n ( t ˉ , t ^ ) = G n ∑ k = 1 K σ k ⋅ S T m ( t ˉ − 2 R k ( t ^ ) c , t ^ − 2 R k ( t ^ ) c ) ⋅ exp ( j ψ k m n ) \begin{aligned} & S_R^{m n}(\bar{t}, \hat{t})=G_n \sum_{k=1}^K \sigma_k \cdot S_T^m(\bar{t}\left.-\frac{2 R_k(\hat{t})}{c}, \hat{t}-\frac{2 R_k(\hat{t})}{c}\right) \\ & \cdot \exp \left(j \psi_k^{m n}\right)\end{aligned} SRmn(tˉ,t^)=Gnk=1∑Kσk⋅STm(tˉ−c2Rk(t^),t^−c2Rk(t^))⋅exp(jψkmn)
-
G n G_n Gn: the gain of the n-th RX antenna
-
σ k \sigma_k σk: the RCS of the k-th target
-
ψ k m n \psi_k^{m n} ψkmn: the delay phase difference caused by antenna element position
✅远场条件下,有: ψ k m n = 2 π λ ( d m + d n ) sin θ k \psi_k^{m n}=\frac{2 \pi}{\lambda}\left(d_m+d_n\right) \sin \theta_k ψkmn=λ2π(dm+dn)sinθk
✅ d m d_m dm: the distance between the m-th TX antenna and the reference transmitter
✅ d n d_n dn: the distance between the n-th RX antenna and the reference receiver
✅ θ k \theta_k θk: the angle of the k-th target with respect to normal direction of the array
-
-
IF中频信号:
-
S I F m n ( t ˉ , t ^ ) = G m G n p m ( t ^ ) ∑ k = 1 K σ k ⋅ exp ( j ψ k m n ) ⋅ exp ( − j 4 π f c R k ( t ^ ) c ) ⋅ exp ( − j 4 π μ t ˉ c R k ( t ^ ) ) ⋅ exp ( j 4 π μ c 2 R k ( t ^ ) 2 ) \begin{aligned} S_{I F}^{m n}(\bar{t}, \hat{t})= & G_m G_n \mathbf{p}_{\mathbf{m}}(\hat{t}) \sum_{k=1}^K \sigma_k \\ & \cdot \exp \left(j \psi_k^{m n}\right) \cdot \exp \left(\frac{-j 4 \pi f_c R_k(\hat{t})}{c}\right) \\ & \cdot \exp \left(\frac{-j 4 \pi \mu \bar{t}}{c} R_k(\hat{t})\right) \cdot \exp \left(\frac{j 4 \pi \mu}{c^2} R_k(\hat{t})^2\right)\end{aligned} SIFmn(tˉ,t^)=GmGnpm(t^)k=1∑Kσk⋅exp(jψkmn)⋅exp(c−j4πfcRk(t^))⋅exp(c−j4πμtˉRk(t^))⋅exp(c2j4πμRk(t^)2)
-
离散形式的中频信号:
✅ S I F m n ( n r , n a ) = G m G n p m ∑ k = 1 K σ k ⋅ exp ( j ψ k m n ) ⋅ exp ( − j 4 π f c R k ( n a ) c ) ⋅ exp ( − j 4 π μ R k ( n a ) c ⋅ n r − 1 f s ) ⋅ exp ( j 4 π μ ( R k ( n a ) c ) 2 ) \begin{aligned} S_{I F}^{m n}\left(n_r, n_a\right)= & G_m G_n \mathbf{p}_{\mathbf{m}} \sum_{k=1}^K \sigma_k \\ & \cdot \exp \left(j \psi_k^{m n}\right) \cdot \exp \left(\frac{-j 4 \pi f_c R_k\left(n_a\right)}{c}\right) \\ & \cdot \exp \left(\frac{-j 4 \pi \mu R_k\left(n_a\right)}{c} \cdot \frac{n_r-1}{f_s}\right) \\ & \cdot \exp \left(j 4 \pi \mu\left(\frac{R_k\left(n_a\right)}{c}\right)^2\right)\end{aligned} SIFmn(nr,na)=GmGnpmk=1∑Kσk⋅exp(jψkmn)⋅exp(c−j4πfcRk(na))⋅exp(c−j4πμRk(na)⋅fsnr−1)⋅exp(j4πμ(cRk(na))2)
-
n r = 1 , 2 , . . . , N r n_r = 1, 2, ..., N_r nr=1,2,...,Nr: the indexes of the pulse samples
-
n a = 1 , 2 , . . . , N a n_a = 1, 2, ..., N_a na=1,2,...,Na: the indexes of pulses
-
N r N_r Nr: the number of samples in one pulse
-
N a N_a Na: the number of pulses in one frame
-
f s f_s fs: the sampling frequency
-
t ^ = n a / P R F \hat{t} = n_a / PRF t^=na/PRF, PRF: the m-th transmitter transmission repetition frequency
-
2.2 Two methods of MIMO waveform coding
Two typical schemes of MIMO waveform coding: TDM-MIMO and DDM-MIMO ⇒ \Rightarrow ⇒ to ensure orthogonality
2.2.1 TDM-MIMO
-
“1”: the m-th transmitter is active; “0”: the m-th transmitter is inactive
- P = [ 1 0 ⋯ 0 0 1 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ 1 ] \mathbf{P}=\left[\begin{array}{cccc}1 & 0 & \cdots & 0 \\ 0 & 1 & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & 1\end{array}\right] P= 10⋮001⋮0⋯⋯⋱⋯00⋮1
-
优点:
- 简单
- 正交性好
-
缺点:
- 牺牲了MIMO transmission capability
- a phase difference between each transmitted waveform due to the target motion needs to be corrected based on an accurate velocity estimation
2.2.2 DDM-MIMO
-
p
m
\mathbf{p_m}
pm is written as:
- P m = [ 1 , exp ( j 2 π f m / P R F ) , … exp ( j 2 π ( N a − 1 ) f m / P R F ) ] \begin{aligned} & \mathbf{P}_{\mathbf{m}}=\left[1, \exp \left(j 2 \pi f_m / P R F\right), \ldots\right. \\ &\left.\exp \left(j 2 \pi\left(N_a-1\right) f_m / P R F\right)\right]\end{aligned} Pm=[1,exp(j2πfm/PRF),…exp(j2π(Na−1)fm/PRF)]
- f m f_m fm: the Doppler offset related to the m-th transmitted waveform
- 波形正交性:
- 在多普勒域中实现,并表现为每个波形之间不同的预定义多普勒偏移
- 优点:
- 采用多天线同时传输方式,DDM-MIMO对应的PRF较TDM-MIMO提高了M倍
- 缺点:
- 在多目标情况下目标虚警现象更严重
- 解码:
- DDM解码通常是通过在慢时域中乘以编码序列的共轭来解调回波数据

2.3 Basic Radar Signal Processing
-
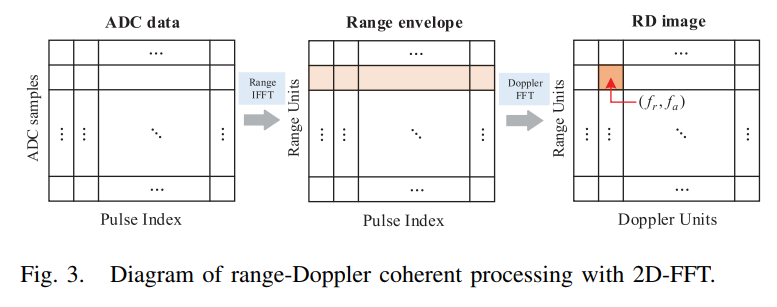
1 Range FFT + Doppler FFT:
- S I F m n ( f r , f a ) = G m G n ∑ k = 1 K σ k ⋅ exp ( j ψ k m n ) ⋅ exp ( − j 4 π f c R k 0 c ) ⋅ sinc ( T p ( f r − 2 μ R k ( n a ) c ) ) ⋅ sinc ( T a ( f d − 2 f c v k c ) ) \begin{aligned} & S_{I F}^{m n}\left(f_r, f_a\right) \\ &= G_m G_n \sum_{k=1}^K \sigma_k \cdot \exp \left(j \psi_k^{m n}\right) \cdot \exp \left(-j 4 \pi f_c \frac{R_{k 0}}{c}\right) \\ & \cdot \operatorname{sinc}\left(T_p\left(f_r-2 \mu \frac{R_k\left(n_a\right)}{c}\right)\right) \cdot \operatorname{sinc}\left(T_a\left(f_d-\frac{2 f_c v_k}{c}\right)\right)\end{aligned} SIFmn(fr,fa)=GmGnk=1∑Kσk⋅exp(jψkmn)⋅exp(−j4πfccRk0)⋅sinc(Tp(fr−2μcRk(na)))⋅sinc(Ta(fd−c2fcvk))
-
2 CFAR
-
3 DOA
-
4 坐标变换
- [ x q y q z q v q ] = [ R q ⋅ cos ϕ q ⋅ cos θ q R q ⋅ cos ϕ q ⋅ sin θ q R q ⋅ sin ϕ q f d ⋅ λ / 2 ] , q = 1 , 2 , … , Q \left[\begin{array}{l}\mathbf{x}_{\mathbf{q}} \\ \mathbf{y}_{\mathbf{q}} \\ \mathbf{z}_{\mathbf{q}} \\ \mathbf{v}_{\mathbf{q}}\end{array}\right]=\left[\begin{array}{c}R_q \cdot \cos \phi_q \cdot \cos \theta_q \\ R_q \cdot \cos \phi_q \cdot \sin \theta_q \\ R_q \cdot \sin \phi_q \\ f_d \cdot \lambda / 2\end{array}\right], \quad q=1,2, \ldots, Q xqyqzqvq = Rq⋅cosϕq⋅cosθqRq⋅cosϕq⋅sinθqRq⋅sinϕqfd⋅λ/2 ,q=1,2,…,Q
3 High-Resolution PointClouds Imagery Generation
-
focus on addressing above challenges:
- 1 Optimal waveform orthogonality design
- 2 High-dynamic high-resolution velocity measurement
- 3 High-resolution DOA estimation
-
针对1和2:
- a novel velocity ambiguity resolution algorithm combining with a TDM-DDM-MIMO framework
-
针对3:
- a complex-valued deep convolution network (CV-DCN) of DOA-SR estimation
3.1 Proposed MIMO-Based Velocity Ambiguity Resolution Algorithm
- 仅使用 TDM 或者 DDM is almost unfeasible
- 需要设计一种方案 : TDM-DDM-MIMO
- 同时利用 TDM的inherent waveform orhogonality + DDM的high-dynamic high-resolution velocity measurement
- 并且避免了DDM中的多目标检测问题 和 TDM的 PRF 与发射器数量之间的固有矛盾
- 同时,提出了一种基于 TDM-DDM-MIMO 的 dual-PRF waveforms velocity ambiguity resolution algorithm
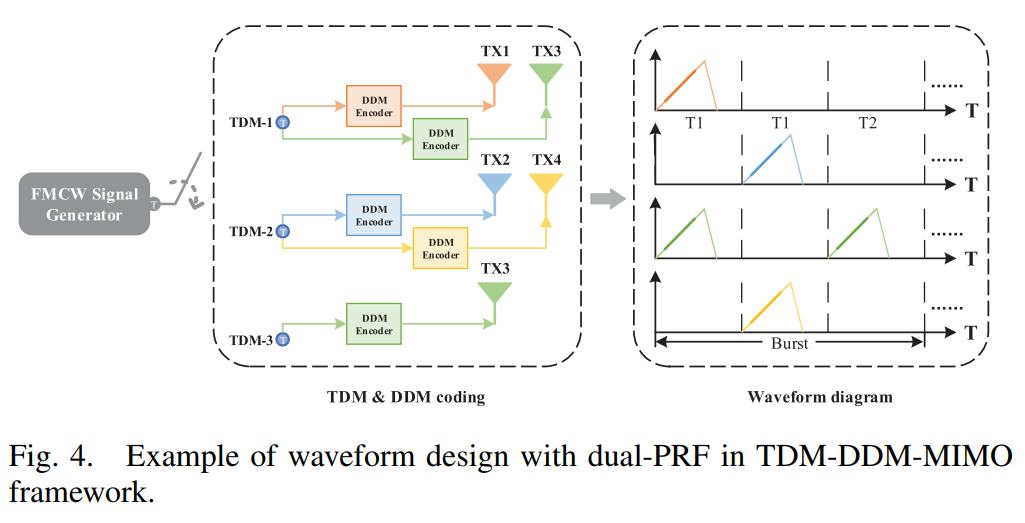
3.1.1 TDM-DDM-MIMO Framework
- TDM部分:
- 三个均匀排列的发射机在三个相邻的传输周期内依次发射波形
- DDM部分:
- 三个时分波形均产生两个不同的PRF
- 其余发射机:
- 在前两个发射周期内合理分配,通过DDM编码发射正交波形
- 在第三个发射周期内,仅保持一个发射机处于活动状态,其余发射机处于非活动状态 ⇒ \Rightarrow ⇒ 避免了DDM中的多目标干扰问题
- 此外,对三个均匀放置的发射机的相应回波数据进行干涉相位处理,以提高明确的速度范围
下图是一个示例:
- T1: 表示 多天线传输(DDM编码)的前两个发射脉冲的PRI
- T2: 表示 单天线传输(DDM编码)的第三个发射脉冲的PRI
- For the same reveiver, the difference between the mixed phase difference
ψ
1
,
2
\psi_{1,2}
ψ1,2 and
ψ
2
,
3
\psi_{2,3}
ψ2,3 is:
- Δ ψ = ψ 2 , 3 − ψ 1 , 2 = 4 π λ v ( T 2 − T 1 ) + ϵ Δ ψ \Delta \psi=\psi_{2,3}-\psi_{1,2}=\frac{4 \pi}{\lambda} v\left(T_2-T_1\right)+\epsilon_{\Delta \psi} Δψ=ψ2,3−ψ1,2=λ4πv(T2−T1)+ϵΔψ
- ϵ Δ ψ \epsilon_{\Delta \psi} ϵΔψ: the phase error deviating from the theoretical value ⇒ \Rightarrow ⇒ can be ignored
- Due to
Δ
ψ
∈
[
−
π
,
π
]
\Delta \psi \in [-\pi, \pi]
Δψ∈[−π,π], the estimated unambiguous range of v is:
- v ∈ [ − λ 4 ( T 2 − T 1 ) , λ 4 ( T 2 − T 1 ) ] v \in\left[-\frac{\lambda}{4\left(T_2-T_1\right)}, \frac{\lambda}{4\left(T_2-T_1\right)}\right] v∈[−4(T2−T1)λ,4(T2−T1)λ]
- 相比于TDM-MIMO,TDM-DDM-MIMO的最大无歧义速度提高了:
- v max = M T 1 ( T 2 − T 1 ) v_{\max}=\frac{M T1}{\left(T_2-T_1\right)} vmax=(T2−T1)MT1 倍
仿真实验
-
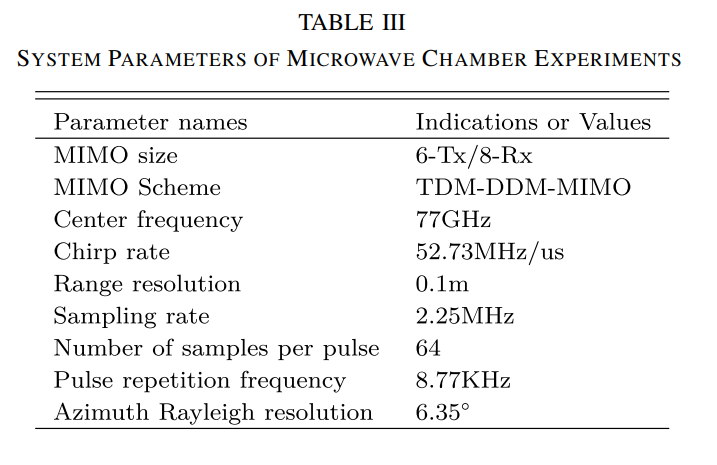
实验参数:
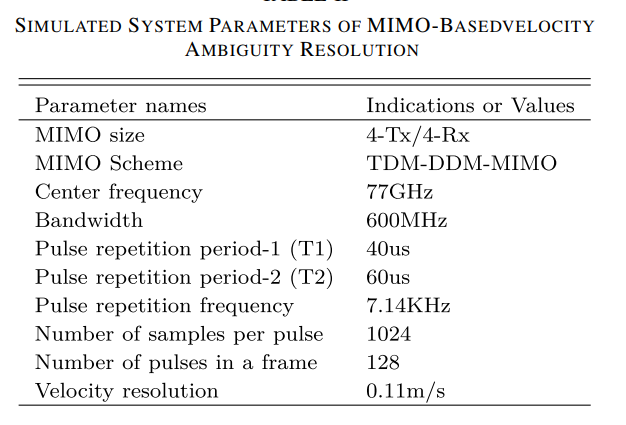
-
速度范围的提升:(compared with TDM)
- original unambiguous velocity range: [-6.96m/s, 6.96m/s]
- after the ambiguity resolution processing: [-48.70m/s, 48.70m/s]
-
ghost目标的消除 (compared with DDM):
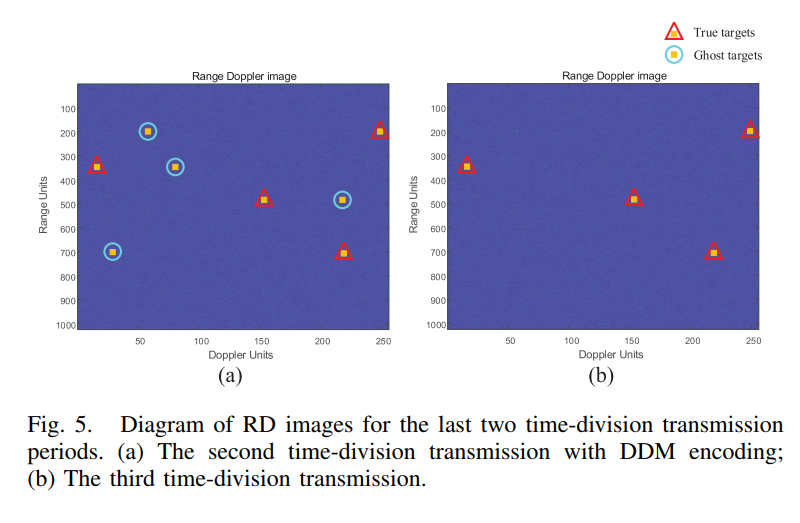
- 最后一个单发射的T2: 没有ghost
- T1(图a): 有ghost
- 使用图b辅助图a
-
结论:
- TDM-DDM-MIMO framework:
- 1 保持了正交性
- 2 提高了M倍的PRF
- 3 避免了DDM中的多目标干扰问题
- TDM-DDM-MIMO framework:
3.2 Proposed DL-Based DOA Estimation Algorithm
- traditional DOA algorithm的局限:
- multi-snapshot data acquisition and high computational complexity
- 所提出的方法:DL-based super-resolution DOA algorithm
- 1 spatial smoothing algorithm
- 2 Deep learning technologies
(1) Pre-Processing of Single Snapshot Data (空间平滑算法)
-
L-element ULA MIMO’s output:
- X a z i = [ x a z i 1 , x a z i 2 , … , x a z i L ] T x a z i l = ∑ q = 1 Q x r , q ⋅ exp ( j ψ q a z i l ) + ϵ a z i l \begin{aligned} X_{a z i} & =\left[x_{a z i_1}, x_{a z i_2}, \ldots, x_{a z i_L}\right]^T \\ x_{a z i_l} & =\sum_{q=1}^Q x_{r, q} \cdot \exp \left(j \psi_q^{a z i_l}\right)+\epsilon_{a z i_l}\end{aligned} Xazixazil=[xazi1,xazi2,…,xaziL]T=q=1∑Qxr,q⋅exp(jψqazil)+ϵazil
- 其中, [ ψ q a z i 1 , ψ q a z i 2 , … , ψ q a z i L ] = [ 0 , 2 π / λ ⋅ d sin ( θ q ) , … 2 π / λ ⋅ d ( L − 1 ) sin ( θ q ) ] \left[\psi_q^{a z i_1}, \psi_q^{a z i_2}, \ldots, \psi_q^{a z i_L}\right]=\left[0,2 \pi / \lambda \cdot d \sin \left(\theta_q\right), \ldots\right. \left.2 \pi / \lambda \cdot d(L-1) \sin \left(\theta_q\right)\right] [ψqazi1,ψqazi2,…,ψqaziL]=[0,2π/λ⋅dsin(θq),…2π/λ⋅d(L−1)sin(θq)]: the array steering vector corresponding to θ q \theta _q θq
- d: baseline of the azimuth array
-
使用空间平滑算法的原因:
- 空间谱估计算法通常利用多快拍数据构造协方差矩阵/spatial correlation matrix(然后通过特征分解来估计空间谱)
- 但为了保证实时性,仅使用了单快拍数据
- 因此,需要使用空间平滑算法 ⇒ \Rightarrow ⇒ to equivalently construct the multi-snapshot data
-
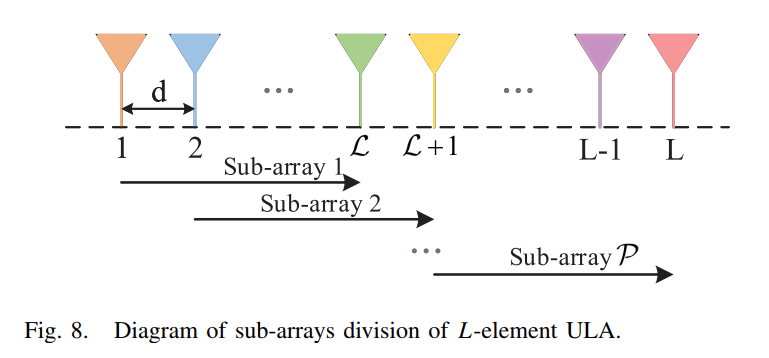
Step1: 将 L 的线阵分为P个子阵列:
-
-
the array output of each sub-array [ x 1 , x 2 , … , x P ] T \left[\mathbf{x}_1, \mathbf{x}_2, \ldots, \mathbf{x}_{\mathcal{P}}\right]^T [x1,x2,…,xP]T:
✅ { x 1 = ∑ q = 1 Q a 1 ( θ q ) ⋅ x r , q + ϵ 1 x 2 = ∑ q = 1 Q a 2 ( θ q ) ⋅ x r , q + ϵ 2 … x P = ∑ q = 1 Q a P ( θ q ) ⋅ x r , q + ϵ P \left\{\begin{aligned} \mathbf{x}_1= & \sum_{q=1}^Q \mathbf{a}_1\left(\theta_q\right) \cdot x_{r, q}+\epsilon_1 \\ \mathbf{x}_2= & \sum_{q=1}^Q \mathbf{a}_2\left(\theta_q\right) \cdot x_{r, q}+\epsilon_2 \\ & \ldots \\ \mathbf{x}_{\mathcal{P}}= & \sum_{q=1}^Q \mathbf{a}_{\mathcal{P}}\left(\theta_q\right) \cdot x_{r, q}+\epsilon_{\mathcal{P}}\end{aligned}\right. ⎩ ⎨ ⎧x1=x2=xP=q=1∑Qa1(θq)⋅xr,q+ϵ1q=1∑Qa2(θq)⋅xr,q+ϵ2…q=1∑QaP(θq)⋅xr,q+ϵP
-
其中, [ a 1 ( θ q ) , a 2 ( θ q ) , … , a P ( θ q ) ] T \left[\mathbf{a}_1\left(\theta_q\right), \mathbf{a}_2\left(\theta_q\right), \ldots, \mathbf{a}_{\mathcal{P}}\left(\theta_q\right)\right]^T [a1(θq),a2(θq),…,aP(θq)]T: the steering vector of each sub-array corresponding to θ q \theta_q θq
-
ϵ 1 , ϵ 2 , … , ϵ P \epsilon_1, \epsilon_2, \ldots, \epsilon_{\mathcal{P}} ϵ1,ϵ2,…,ϵP: the independent complex Gaussian white noise of each sub-array
-
-
Step2: 逆向平滑,获得 the array output of each inverted sub-arrays:
- [ x P ∗ , x P − 1 ∗ , … , x 1 ∗ ] T \left[\mathbf{x}_{\mathcal{P}}^*, \mathbf{x}_{\mathcal{P}-1}^*, \ldots, \mathbf{x}_1^*\right]^T [xP∗,xP−1∗,…,x1∗]T
-
Step3: 合成multi-snapshot data x ~ ( t n ) \widetilde{\mathbf{x}}\left(t_n\right) x (tn)
- 等价于:牺牲物理孔径来获得时间维度上的sampling
- x ~ ( t n ) = [ x 1 , x 2 , … , x P , x P ∗ , … , x 1 ∗ ] T = ∑ q = 1 Q a ( θ q ) ⋅ x r , q ( t n ) + ϵ ( t n ) \begin{aligned} \widetilde{\mathbf{x}}\left(t_n\right) & =\left[\mathbf{x}_1, \mathbf{x}_2, \ldots, \mathbf{x}_{\mathcal{P}}, \mathbf{x}_{\mathcal{P}}^*, \ldots, \mathbf{x}_1^*\right]^T \\ & =\sum_{q=1}^Q \mathbf{a}\left(\theta_q\right) \cdot x_{r, q}\left(t_n\right)+\epsilon\left(t_n\right)\end{aligned} x (tn)=[x1,x2,…,xP,xP∗,…,x1∗]T=q=1∑Qa(θq)⋅xr,q(tn)+ϵ(tn)
- 其中, a ( θ q ) \mathbf{a}\left(\theta_q\right) a(θq): the steering vector for sub-arrays with the same array manifold
- t n = 1 , … , 2 ( L − L + 1 ) t_n=1, \ldots, 2(L-\mathcal{L}+1) tn=1,…,2(L−L+1): the index of snapshot
-
Step4: 估计空间谱
-
then, the spatial correlation matrix of the adjusted multi-snapshot data can be estimated as: R ~ = E [ x ~ ( t n ) ⋅ x ~ H ( t n ) ] = ∑ q = 1 Q η q ⋅ a ( θ q ) ⋅ a H ( θ q ) + σ ϵ 2 I \begin{aligned} \widetilde{\mathbf{R}} & =\mathbb{E}\left[\widetilde{\mathbf{x}}\left(t_n\right) \cdot \widetilde{\mathbf{x}}^H\left(t_n\right)\right] \\ & =\sum_{q=1}^Q \eta_q \cdot \mathbf{a}\left(\theta_q\right) \cdot \mathbf{a}^H\left(\theta_q\right)+\sigma_\epsilon^2 I\end{aligned} R =E[x (tn)⋅x H(tn)]=q=1∑Qηq⋅a(θq)⋅aH(θq)+σϵ2I
-
其中, η q = E [ x r , q ( t n ) ⋅ x r , q H ( t n ) ] \eta_q=\mathbb{E}\left[x_{r, q}\left(t_n\right) \cdot x_{r, q}^H\left(t_n\right)\right] ηq=E[xr,q(tn)⋅xr,qH(tn)]:the signal power on the direction of q − t h q-th q−th target
-
DOA估计:已知 correlation matrix R ~ \widetilde{\mathbf{R}} R ,求 η q = E [ x r , q ( t n ) ⋅ x r , q H ( t n ) ] \eta_q=\mathbb{E}\left[x_{r, q}\left(t_n\right) \cdot x_{r, q}^H\left(t_n\right)\right] ηq=E[xr,q(tn)⋅xr,qH(tn)]
-
R ~ \widetilde{\mathbf{R}} R 的第 k k k列可以rewritten 为: r κ = R ~ ⋅ e κ ≜ A κ ⋅ Γ + σ ϵ 2 ⋅ e κ \mathbf{r}_\kappa=\widetilde{\mathbf{R}} \cdot \mathbf{e}_\kappa \triangleq \mathbf{A}_\kappa \cdot \Gamma+\sigma_\epsilon^2 \cdot \mathbf{e}_\kappa rκ=R ⋅eκ≜Aκ⋅Γ+σϵ2⋅eκ
✅ 其中, A κ = [ a ( θ 1 ) a H ( θ 1 ) e κ , … , a ( θ Q ) a H ( θ Q ) e κ ] \mathbf{A}_\kappa=\left[\mathbf{a}\left(\theta_1\right) \mathbf{a}^H\left(\theta_1\right) \mathbf{e}_\kappa, \ldots, \mathbf{a}\left(\theta_Q\right) \mathbf{a}^H\left(\theta_Q\right) \mathbf{e}_\kappa\right] Aκ=[a(θ1)aH(θ1)eκ,…,a(θQ)aH(θQ)eκ], e κ \mathbf{e}_\kappa eκ:the κ \kappa κ-th column of the identity matrix (L × 1 vector with the κ-th element being “1” and others being “0”.)
-
因此有: r = [ r 1 ; ⋯ ; r L ] = A ~ ⋅ Γ + σ ϵ 2 Ω \mathbf{r}=\left[\mathbf{r}_1 ; \cdots ; \mathbf{r}_{\mathcal{L}}\right]=\widetilde{\mathbf{A}} \cdot \Gamma+\sigma_\epsilon^2 \Omega r=[r1;⋯;rL]=A ⋅Γ+σϵ2Ω
✅ 其中, A ~ = [ A 1 ; ⋯ ; A L ] , Ω = [ e ~ 1 ; ⋯ ; e ~ L ] \widetilde{\mathbf{A}}=\left[\mathbf{A}_1 ; \cdots ; \mathbf{A}_{\mathcal{L}}\right], \Omega=\left[\widetilde{\mathbf{e}}_1 ; \cdots ; \widetilde{\mathbf{e}}_{\mathcal{L}}\right] A =[A1;⋯;AL],Ω=[e 1;⋯;e L].
-
后续CV-DCN的任务:已知measurement vector r r r 求 Γ \Gamma Γ ,即:一个典型的逆问题
-
(2) CV-DCN Design
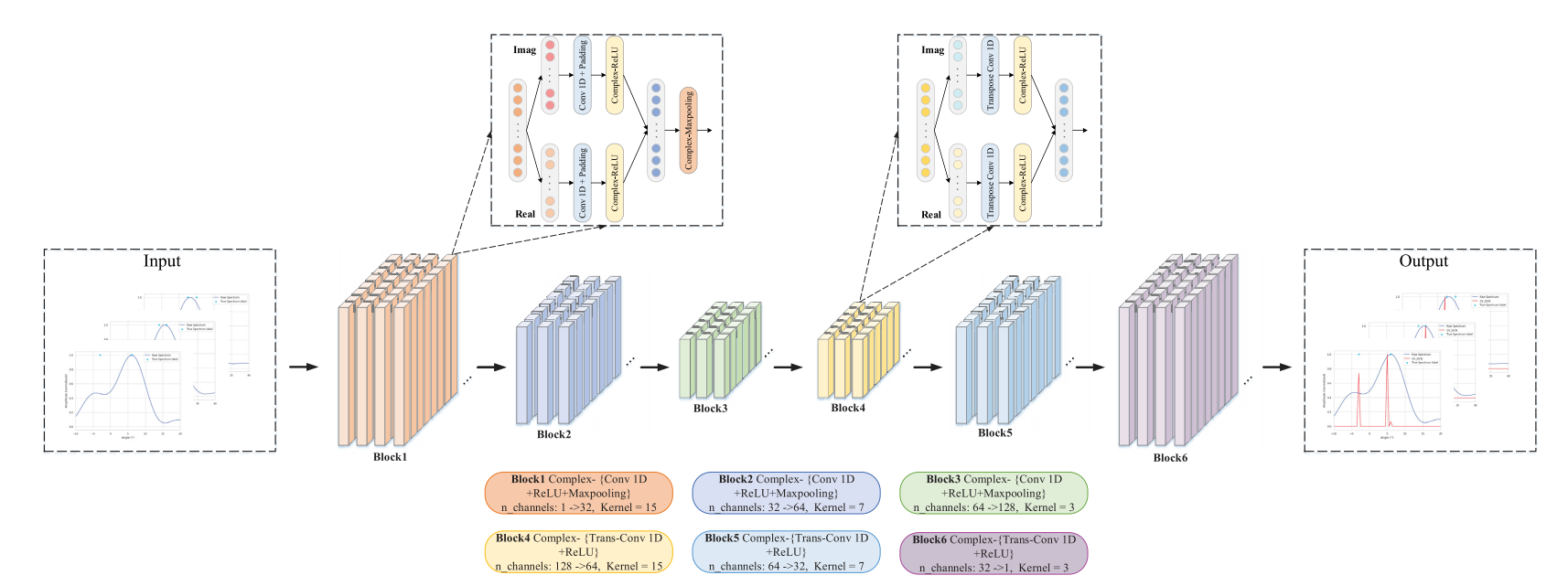
- 网络结构
- 基于CNN + autoencoder
- CV-DCN: has six blocks
- 1~3 blocks:
- lower sampling processing
- ComplexConv 1D + complex-valued ReLU + Complex max-pooling
- 4~6 blocks:
- upper sampling processing
- Complex-Trans-Conv 1D + complex-valued ReLU
-
Complex Conv 1d:
- 令 h = x + j y \mathbf{h}=x+j y h=x+jy表示complex vector, w = a + j b \mathbf{w}=a+j b w=a+jb表示complex convolutional kernel
- 则卷积过程表示为: [ R ( w ∗ h ) I ( w ∗ h ) ] = [ a − b b a ] ∗ [ x y ] \left[\begin{array}{c}\mathscr{R}(\mathbf{w} * \mathbf{h}) \\ \mathscr{I}(\mathbf{w} * \mathbf{h})\end{array}\right]=\left[\begin{array}{cc}a & -b \\ b & a\end{array}\right] *\left[\begin{array}{l}x \\ y\end{array}\right] [R(w∗h)I(w∗h)]=[ab−ba]∗[xy]
-
complex-valued ReLU (CReLU)
- C Re L U ( h ) = ReLU ( R ( h ) ) + j ReLU ( I ( h ) ) C \operatorname{Re} L U(h)=\operatorname{ReLU}(\mathscr{R}(h))+j \operatorname{ReLU}(\mathscr{I}(h)) CReLU(h)=ReLU(R(h))+jReLU(I(h))
-
Complex max-pooling: 取maximum amplitude
-
CV-DCN可以表示为:
- o ( n ) = { CMP ( CReLU ( w ( n ) ∗ x ( n ) + B ( n ) ) ) , n = 1 , 2 , 3. CReLU ( w ( n ) ⊛ x ( n ) + B ( n ) ) , n = 4 , 5 , 6. \mathbf{o}^{(n)}= \begin{cases}\operatorname{CMP}\left(\operatorname{CReLU}\left(\mathbf{w}^{(n)} * \mathbf{x}^{(n)}+\mathcal{B}^{(n)}\right)\right), & n=1,2,3 . \\ \operatorname{CReLU}\left(\mathbf{w}^{(n)} \circledast \mathbf{x}^{(n)}+\mathcal{B}^{(n)}\right), & n=4,5,6 .\end{cases} o(n)={CMP(CReLU(w(n)∗x(n)+B(n))),CReLU(w(n)⊛x(n)+B(n)),n=1,2,3.n=4,5,6.
- 其中, x ( n ) \mathbf{x}^{(n)} x(n):the input of the n n n-th block; o ( n ) \mathbf{o}^{(n)} o(n):the output of the n n n-th block;
- w ( n ) \mathbf{w}^{(n)} w(n):the convolutional kernel of the n n n-th block; B ( n ) \mathcal{B}^{(n)} B(n):the bias of the n n n-th block;
(3) Learning Strategy
-
1st Stage: 数据集构建
- 训练集:幅度和初始相位随机生成、空间平滑算法、合成回波
- 验证集:生成与训练集保持相同规模、相同生成方式和相同数据分布的验证集
-
2st Stage: 训练
- 损失函数: LOSS = E [ ∥ Θ ˉ − Θ ∥ 2 + β ∥ Θ ˉ ∥ 1 ] = 1 N ∑ n = 1 N ( Θ ˉ n − Θ n ) 2 + β 1 N ∑ n = 1 N ∣ Θ ˉ n ∣ \begin{aligned} \operatorname{LOSS} & =\mathbb{E}\left[\|\bar{\Theta}-\Theta\|_2+\beta\|\bar{\Theta}\|_1\right] \\ & =\frac{1}{\mathcal{N}} \sum_{n=1}^{\mathcal{N}}\left(\bar{\Theta}_n-\Theta_n\right)^2+\beta \frac{1}{\mathcal{N}} \sum_{n=1}^{\mathcal{N}}\left|\bar{\Theta}_n\right|\end{aligned} LOSS=E[∥Θˉ−Θ∥2+β∥Θˉ∥1]=N1n=1∑N(Θˉn−Θn)2+βN1n=1∑N Θˉn
- 其中: Θ n \Theta_n Θn:the ground truth of the n n n-th training sample; Θ ˉ n \bar{\Theta}_n Θˉn:predicted spectrum; N \mathcal{N} N: batchsize
- 优化器:Adam, cosine learning rate
- metric: RMSE ( θ ˉ , θ ) = 1 N K ∑ n = 1 N ∑ k = 1 K ( θ ˉ k − θ k ) n 2 \operatorname{RMSE}(\bar{\theta}, \theta)=\sqrt{\frac{1}{\mathcal{N K}} \sum_{n=1}^{\mathcal{N}} \sum_{k=1}^{\mathcal{K}}\left(\bar{\theta}_k-\theta_k\right)_n^2} RMSE(θˉ,θ)=NK1∑n=1N∑k=1K(θˉk−θk)n2
4 Experimental Analysis
- 使用TI2243EVM模块和Pytorch框架,构建DL模型并训练
4.1 Super-Resolution DOA Estimation Experiments
A 仿真数据实验
-
构建大规模模拟数据集,并将-60°到60°的角范围划分为240个0.5°的网格
-
训练数据集630400个样本,验证集同规模;Epoch300,batch size100,学习率 1 0 − 4 10^-4 10−4,权重衰减 1 0 − 6 10^-6 10−6, β = 1.2 × 1 0 − 3 β=1.2×10^-3 β=1.2×10−3
-
计算复杂度:CV-DCN 47.4Mflops,DCN 0.42Mflops;
-
性能评估:
-
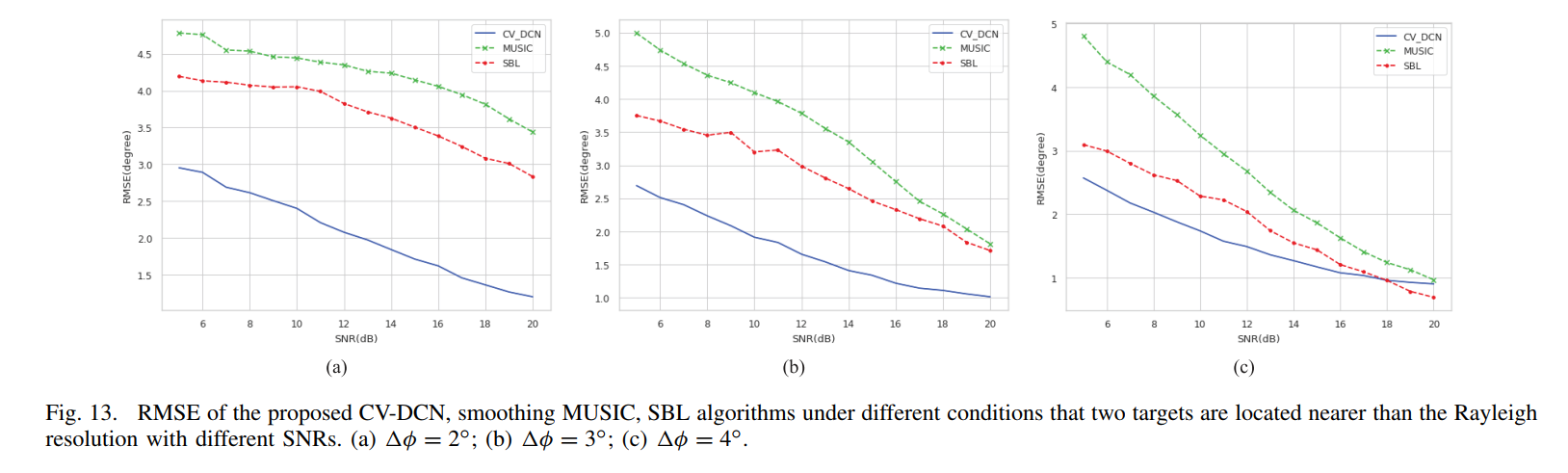
- 比较CV-DCN和DCN,角分离2°到10°,SNR 10dB到20dB,CV-DCN表现更好,误差随SNR降低;
-
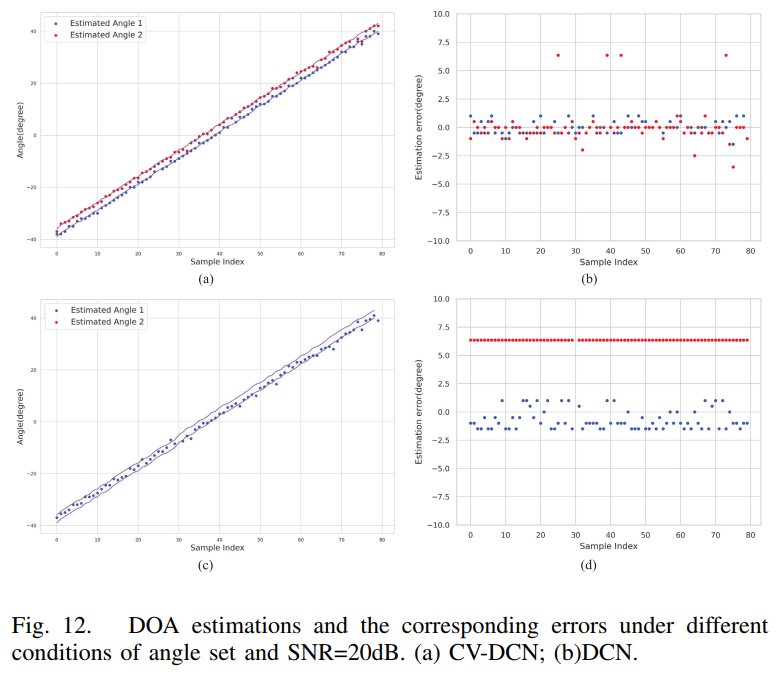
- 两个目标角度-40°到40°,恒定角分离3°,大多数CV-DCN误差<0.5°,DCN多失败;
-
- 两个目标角分离小于分辨率6.35°,CV-DCN性能更稳定。
-
-
结果
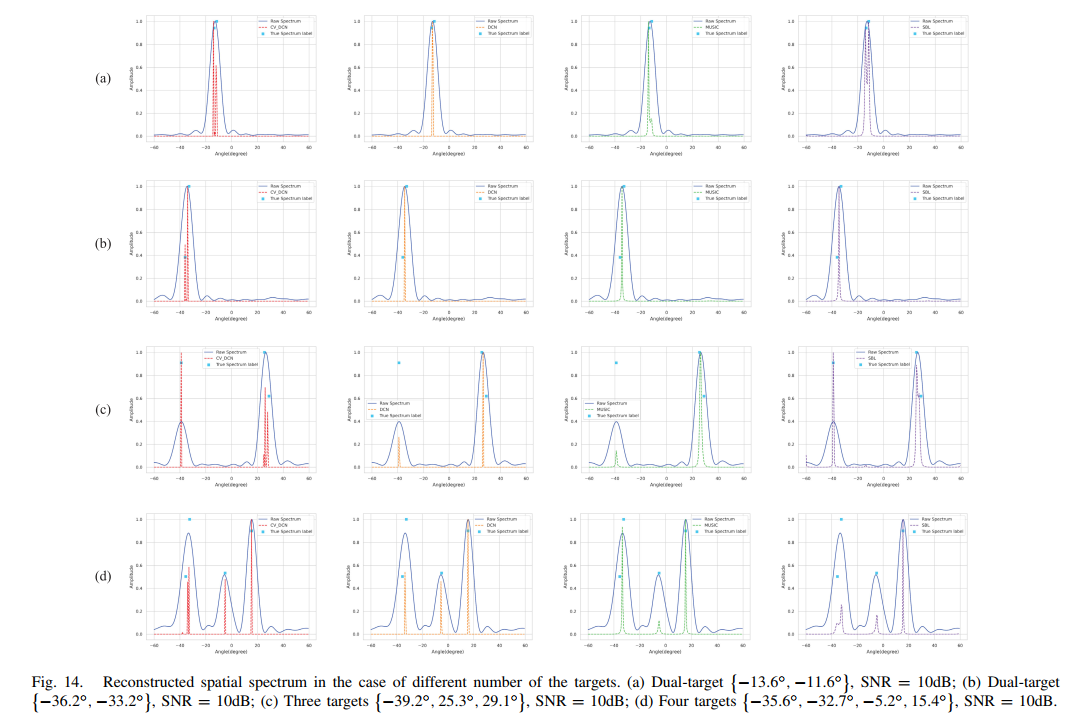
- 不同条件下DOA估计,CV-DCN匹配真值,误差主要<0.5°;DCN多失败。
- 实验参数
- 不同算法在角分离2°到4°和SNR 5dB到20dB的RMSE,CV-DCN性能更稳定
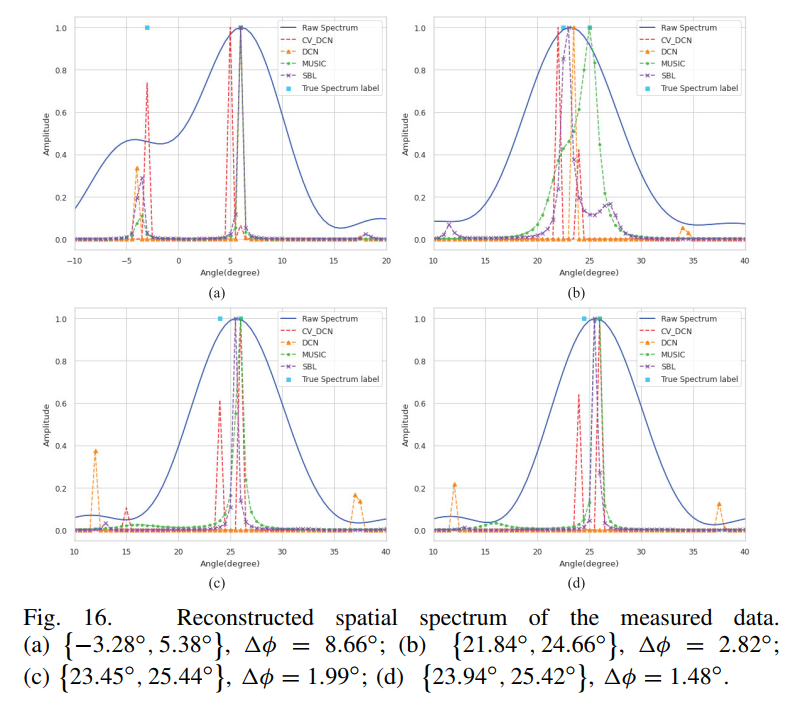
- 原始谱,预测谱和理想标签,两目标和多目标情况,CV-DCN性能更好
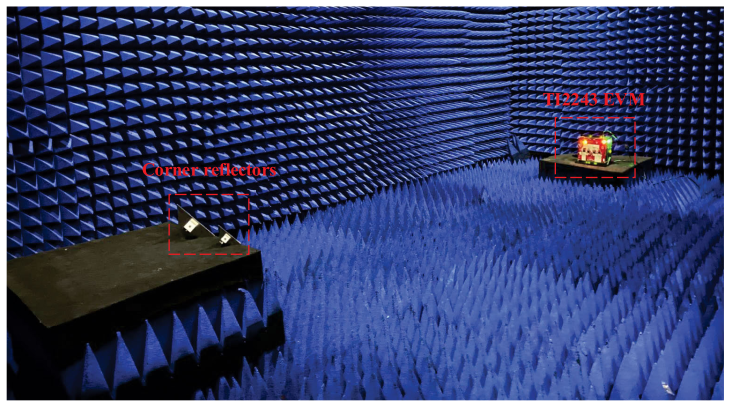
B 实测数据实验
-
实验场景
-
results
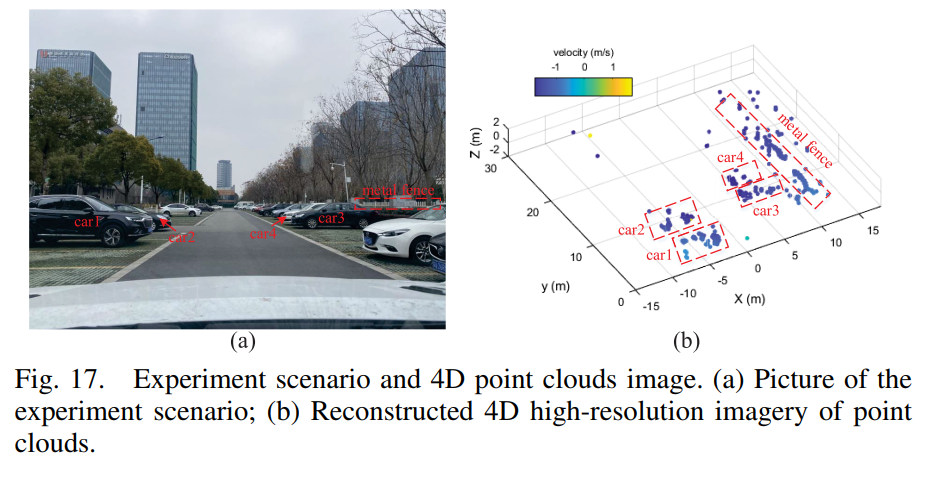
4.2 Extended to 4D Point Clouds Imaging
-
实验结果
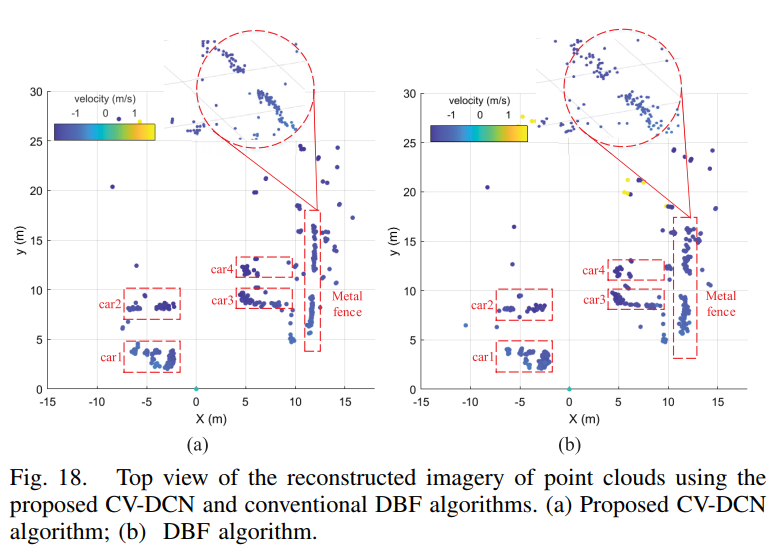
-
对比
5 Conclusion
- Novel algorithm of 4D high-resolution point clouds imagery
- TDM-DDM-MIMO框架 ⇒ \Rightarrow ⇒ 双PRF波形设计相结合,提出优秀速度误差分辨算法
- 提出超分辨DOA估计算法,命名CV-DCN ⇒ \Rightarrow ⇒ 利用神经网络的复值和自编码器结构,进一步利用空间谱的相位信息
- 实验
- 超分辨DOA估计算法的有效性
- 使用测量数据实验实现4D高分辨点云成像
- future work
- 提升实际应用中的泛化能力
















 149
149











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











